1.本技术涉及钩子粉末浸塑机领域,特别涉及一种钩子粉末浸塑机自动拆钩装置。
背景技术:
2.如图1所示的钩子,在进行粉末浸塑前,需要通过铁丝的下端固定在钩子的上部,铁丝的上端固定在粉末浸塑移动架上,设置铁丝是为了保证钩子在粉末浸塑的时候,可以牢固的固定在粉末浸塑移动架上,一般一个移动架上会吊着80到100个钩子,当钩子浸塑完后,完全靠工人一个一个的将钩子从移动架上扯下来,从而大大的增加了工人的劳动强度。
技术实现要素:
3.本发明的目的是提供一种可以降低工人劳动强度的钩子粉末浸塑机自动拆钩装置。
4.为了实现上述目的,本技术提供如下技术方案:
5.一种钩子粉末浸塑机自动拆钩装置,包括移动架、第一驱动装置、移动导轨、拆钩装置和中转拉带,所述移动架安装在移动导轨上,所述第一驱动装置可驱动移动架做相对移动,所述拆钩装置安装在移动导轨上,所述中转拉带设置在拆钩装置的下方,所述拆钩装置可将吊设在移动架上的钩子拆落到中转拉带上。
6.在一种可能的实现方式中,所述拆钩装置包括拆钩板、安装架和安装板,所述安装板分别设置在移动导轨的两侧,所述拆钩板通过安装架安装在两安装板之间,所述拆钩板的前侧设置有多个拆钩口,所述拆钩口与移动架上用于悬挂钩子的铁丝相对应,所述拆钩口可将铁丝切断。
7.在一种可能的实现方式中,所述拆钩板与水平面的夹角为20
°
~40
°
。
8.在一种可能的实现方式中,所述拆钩板与水平面的夹角为30
°
。
9.在一种可能的实现方式中,所述拆钩口的夹角为30
°
~40
°
。
10.在一种可能的实现方式中,所述拆钩口的夹角为33
°
。
11.在一种可能的实现方式中,所述拆钩口的上侧边设置有斜倒角。
12.在一种可能的实现方式中,所述第一驱动装置包括链条链轮模组、第一电机和感应装置,所述移动架安装在链轮模组上,所述第一电机可驱动链轮模组带动移动架做前后移动,所述感应装置与第一电机连接,所述感应装置设置拆钩装置的一侧。
13.在一种可能的实现方式中,所述移动导轨的前端的两侧分别设置有导向部,所述导向部呈喇叭状。
14.本技术的有益效果为:
15.本技术工作时,钩子通过铁丝吊在移动架上,当第一驱动装置驱动移动架移动到拆钩装置时,移动架的移动配合拆钩装置,可快速自动将钩子从移动架上拆下来,拆下的钩子掉落到中转拉带,中转拉带将钩子转运到下一工序中。本技术与现有技术采用人工用手将一个一个的钩子扯下来相比,本技术大大的降低工人的劳动强度,无需工人手动扯钩子
下来,从而还提高了拆钩的效率。
附图说明
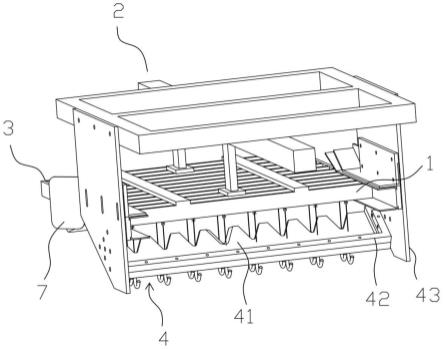
16.图1为本技术一实施例提供的钩子粉末浸塑机自动拆钩装置的立体结构示意图;
17.图2为本技术一实施例提供的钩子粉末浸塑机自动拆钩装置的主视图;
18.图3为本技术一实施例提供的拆钩板的立体结构示意图;
19.图4为本技术一实施例提供的拆钩板的主视图。
20.附图标记说明:
21.1、移动架;2、第一驱动装置;3、移动导轨;4、拆钩装置;5、中转拉带;6、感应装置;7、导向部;8、挡料板;
22.41、拆钩板;42、安装架;43、安装板;
23.411、拆钩口;412、斜倒角;
具体实施方式
24.本技术的实施方式部分使用的术语仅用于对本技术的具体实施例进行解释,而非旨在限定本技术,下面将结合附图对本技术实施例的实施方式进行详细描述。
25.如图1和图2所示的,一种钩子粉末浸塑机自动拆钩装置,包括移动架1、第一驱动装置2、移动导轨3、拆钩装置4和中转拉带5,移动架1安装在移动导轨3上,第一驱动装置2可驱动移动架1做相对移动,拆钩装置4安装在移动导轨3上,中转拉带5设置在拆钩装置4的下方,拆钩装置4可将吊设在移动架1上的钩子拆落到中转拉带5上,本技术工作时,钩子通过铁丝吊在移动架1上,当第一驱动装置2驱动移动架1移动到拆钩装置4时,移动架1的移动配合拆钩装置4,可快速自动将钩子从移动架1上拆下来,拆下的钩子掉落到中转拉带5,中转拉带5将钩子转运到下一工序中。本技术与现有技术采用人工用手将一个一个的钩子扯下来相比,本技术大大的降低工人的劳动强度,无需工人手动扯钩子下来,从而还提高了拆钩的效率。
26.如图1所示,在一种可能的实现方式中,拆钩装置4包括拆钩板41、安装架42和安装板43,安装板43分别设置在移动导轨3的两侧,拆钩板41通过安装架42安装在两安装板43之间,拆钩板41的前侧设置有多个拆钩口411,拆钩口411与移动架1上用于悬挂钩子的铁丝相对应,拆钩口411可将铁丝切断。当移动架1带动钩子移动到拆钩口411时,首先吊置钩子的铁丝会先进入到拆钩口411中,当移动架1继续带动钩子移动时,拆钩板41通过拆钩口411从而将钩子卡在拆钩口411下方,知道移动架1将铁丝扯断,扯断铁丝后的钩子就掉落到中转拉带5上。
27.本实施例,一次可以对安装架42上的一排钩子进行拆钩,例如一排钩子有8个到10个,从而可以在2到4秒内拆出8到10个钩子,而采用人工一个一个扯的话,一般8到10个需要20秒左右,因此本实施例的拆钩装置4可以大大的提高拆钩效率。
28.如图4所示的,本实施例中,拆钩板41与水平面的夹角a为20
°
~40
°
,通过将拆钩板41与水平面设置成有夹角,若该夹角小于20
°
,则移动架1在拆钩口411中切断铁丝时,需要更大的力,大于10n,若该夹角大于40
°
,则移动架1在拆钩口411中切断铁丝时,同样需要更大的力,大于12n。而夹角为20
°
~40
°
之间时,移动架1在拆钩口411中切断铁丝时,需要的拉
力为小于10n,从而更省力。
29.在一种可能的实现方式中,拆钩板41与水平面的夹角a为30
°
时,移动架1在拆钩口411中切断铁丝时,需要的拉力为4n,从而更省力。
30.如图3所示的,在一种可能的实现方式中,拆钩口411的夹角b为30
°
~40
°
,设置拆钩口411的夹角b为30
°
~40
°
,若该夹角b小于为30
°
夹角过小,铁丝难以进入到拆钩口411中,若该夹角b大于为40
°
夹角过大,钩子容易从拆钩口411中滑出来。
31.在一种可能的实现方式中,拆钩口411的夹角b为33
°
。
32.在一种可能的实现方式中,拆钩口411的上侧边设置有斜倒角412,可以增加拆钩口411刃口的锋利程度,从而更容易切断铁丝。
33.如图2所示的,在一种可能的实现方式中,第一驱动装置2包括链条链轮模组、第一电机和感应装置6,移动架1安装在链轮模组上,第一电机可驱动链轮模组带动移动架1做前后移动,感应装置6与第一电机连接,感应装置6设置拆钩装置4的一侧。该感应装置6用于移动架1的移动,当感应装置6感应到移动架1在拆钩板41装置上移动了一半距离时,即移动架1上的钩子脱了一半的时候,感应装置6给第一电机发信号,让第一电机停机,从而让移动架1停止运动,当中转拉带5将掉落的钩子移走后。大概3-5秒后,感应装置6给第一电机发信号,让第一电机重新启动,从而可以防止钩子堆积在中转拉带5上太多,导致下一工序即将钩子上的铁丝从钩子上拆掉的时间不够,设置感应装置6,可以下一工序的加工的时间更加充足。
34.如图1所示的,在一种可能的实现方式中,移动导轨3的前端的两侧分别设置有导向部7,导向部7呈喇叭状。设置导向部7可以让移动架1进入到拆钩装置4时,更容易进入,且可以更加的平稳。
35.如图2所示的,中转拉带5对应拆钩装置4的两侧边分别设置有挡料板8,设置挡料板8可以防止钩子掉落到中转拉带5上时,钩子从中转拉带5上弹出。
36.在本技术实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应作广义理解,例如,可以是固定连接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或者两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术实施例中的具体含义。
37.在本技术实施例或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。在本技术实施例的描述中,“多个”的含义是两个或两个以上,除非是另有精确具体地规定。
38.本技术实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术实施例的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“可以包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可可以包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
39.最后应说明的是:以上各实施例仅用以说明本技术实施例的技术方案,而非对其限制。尽管参照前述各实施例对本技术实施例进行了详细的说明,本领域的普通技术人员
应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换。而这些修改或者替换,并不使相应技术方案的本质脱离本技术实施例各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
