1.本技术属于激光切割技术领域,更具体地说,是涉及一种切割方法及光学元件。
背景技术:
2.随着科技的发展,玻璃的应用也越来越广泛,如手机、ar(augmented reality,增强现实)和vr(virtual reality,虚拟现实)中的光学元件。由于玻璃具有高透性,且平整度高,是其他pet(polyethylene terephthalate,聚对苯二甲酸乙二醇酯)材料无法替代,因此,一般采用玻璃作为光学元件的基体材料,同时,在玻璃上贴附膜材,以提高光学元件的显示效果。
3.现有技术中,在对光ar和vr的镜片进行加工时,通常采用以下两种方式对镜片进行切割,一是采用机械切割;二是采用激光对玻璃基体和膜材分别进行切割。如此,采用上述切割技术方案,所产生的问题是:采用机械切割光学元件时,切割后的光学元件的容易出现边缘容易出产生毛刺,致使光学元件的良品率低下;采用激光对光学元件中的玻璃基体和膜材分别进行切割,容易使玻璃基体和膜材产生形变和破碎,且将膜材贴合在玻璃基板上的过程中,膜材贴合在玻璃基板之间容易产生气泡,致使光学元件的良品率低下。
技术实现要素:
4.本技术实施例的目的在于提供一种切割方法及光学元件,以解决现有技术中存在的光学元件在加工时良品率低下的技术问题。
5.为实现上述目的,本技术的第一方面是提供一种切割方法,所述切割方法包括以下步骤:
6.将所述目标结构维持在预设温度范围内;
7.通过激光沿第一预设路径由第一表面向内切割第一预设深度;
8.通过激光沿所述第一预设路径由第二表面向内切割第二预设深度以切割出中间元件;
9.其中,所述第一表面和所述第二表面相对设置,所述第一预设深度和所述第二预设深度之和不小于所述第一表面和所述第二表面之间的间距。
10.一实施例中,所述激光的频率位于850khz—900khz之间,和/或,所述激光的切割速度位于380mm/s—400mm/s之间。
11.一实施例中,所述中间元件用于形成目标元件,所述目标元件的边缘与所述中间元件的边缘形成有中间区域;所述切割方法还包括:
12.将所述中间元件由所述目标结构上分离;
13.将所述中间区域由所述中间元件上分离以获取所述目标元件。
14.一实施例中,所述步骤通过激光沿第一预设路径由第一表面向内切割第一预设深度包括以下步骤:
15.调整所述目标结构至第一预设位置;
16.所述激光在所述第一表面沿第一预设路径和所述第一预设深度切割向内所述中间元件。
17.一实施例中,所述步骤调整所述目标结构至第一预设位置包括以下步骤:
18.通过预设光线照射所述第一表面并使所述预设光线在所述第一表面产生反射光线;
19.由激光测高仪接收所述反射光线,并根据所述反射光线判断所述目标结构是否处于所述第一预设位置;
20.若是,所述激光在所述第一表面沿所述第一预设路径和所述第一预设深度向内切割所述中间元件;
21.若否,所述激光测高仪发出报警信息。
22.一实施例中,所述步骤通过激光沿第一预设路径由第一表面向内切割第一预设深度还包括以下步骤:
23.所述激光在所述第一表面沿第二预设路径切割定位靶标。
24.一实施例中,所述步骤通过激光沿所述第一预设路径由第二表面向内切割第一预设深度以切割出中间元件包括以下步骤:
25.通过所述定位靶标调整所述目标结构至第二预设位置;
26.所述激光在所述第二表面沿所述第一预设曲线和所述第二预设深度向内切割所述中间元件。
27.一实施例中,所述步骤调整所述目标结构至第二预设位置包括以下步骤:
28.通过工业摄像机实时拍摄所述目标结构,并获取所述定位靶标的位置信息;
29.将所述定位靶标的位置信息与所述第二预设位置信息比较,并判断所述定位靶标的位置信息与所述第二预设位置信息是否重合;
30.若是,所述激光在所述第二表面沿所述第一预设路径和所述第二预设深度向内切割所述中间元件;
31.若否,调整所述目标结构运动至所述第二预设位置。
32.一实施例中,所述步骤将所述目标结构维持在预设温度范围内包括:
33.将所述目标结构在预设温度范围内进行预冷却;
34.在所述预设温度范围内固定所述目标结构;其中,
35.所述预设温度范围内的温度位于12℃—14℃之间。
36.本技术提供的切割方法的有益效果在于:与现有技术相比,本技术切割方法包括将目标结构维持在预设温度范围内、通过激光沿第一预设路径由第一表面向内切割第一预设深度、通过激光沿第一预设路径由第二表面向内切割第二预设深度以切割出中间元件;其中,第一表面和第二表面相对设置,第一预设深度和所述第二预设深度之和不小于所述第一表面和所述第二表面之间的间距;采用上述步骤,通过将目标结构放置在预设温度范围内对目标结构进行降温,从而使目标结构在被激光切割时吸收激光的部分热量;通过在两个侧面内对目标结构进行切割,与现有技术中采用激光在目标结构上一个侧面进行切割的技术方案相比,在两个侧面内对目标结构进行切割,能够防止目标结构的同一侧面吸收过多的热量,防止激光在对目标结构进行切割时因局部快速升温而导致的目标结构产生气泡、黑点、形变和目标结构破碎等问题,从而提高目标结构的良品率。
37.第二方面,本技术提供一种光学元件,该光学原件有上述任意一项所述切割方法切割而成。
38.本技术提供的光学元件的有益效果在于:与现有技术相比,本技术所提供的光学元件采用上述任意一项实施例所提供的切割方法切割而成,通过将光学元件构放置在预设温度范围内进行降温,从而使光学元件在被激光切割时吸收激光的部分热量;通过在两个侧面内对光学元件进行切割,与现有技术中采用激光在光学元件上一个侧面进行切割的技术方案相比,在两个侧面内对光学元件进行切割,能够防止光学元件的同一侧面吸收过多的热量,防止激光在对光学元件进行切割时因局部快速升温而导致的光学元件产生气泡、黑点、形变和光学元件破碎等问题,从而提高目标结构的良品率。
附图说明
39.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
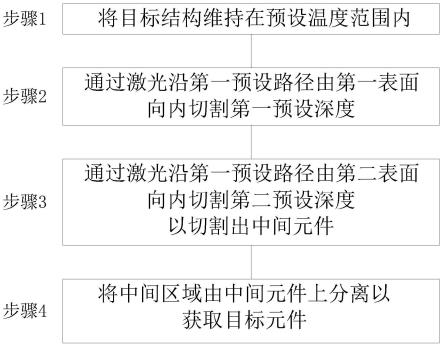
40.图1为本技术实施例提供的切割方法的流程示意图;
41.图2为本技术实施例提供的切割方法的具体流程示意图;
42.图3为本技术实施例提供的步骤1的具体流程示意图;
43.图4为本技术实施例提供的步骤2的具体流程示意图;
44.图5为本技术实施例提供的步骤3的具体流程示意图;
45.图6为本技术实施例提供的步骤4的具体流程示意图;
46.图7为本技术实施例提供的目标结构的爆炸图;
47.图8为本技术实施例提供的目标结构正视图;
48.图9为本技术实施例提供的中间元件2的结构的示意图。
49.其中,图中各附图标记:
50.10、玻璃基体;20、膜材;21、四分之一玻片;22、偏光片;23、反射偏光片;30、第一曲线;40、第二曲线;50、中间元件;51、中间区域;60、目标元件;70、第一定位靶标;80、第二定位靶标。
具体实施方式
51.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
52.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
53.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有
特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
54.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
55.请一并参阅图1至图9,现对本技术实施例提供的切割方法及光学元件进行说明。
56.本技术的第一方面是提供一种切割方法,该切割方法包括以下步骤:
57.步骤1,将目标结构维持在预设温度范围内;
58.步骤2,通过激光沿第一预设路径由第一表面向内切割第一预设深度;
59.步骤3,通过激光沿第一预设路径由第二表面向内切割第二预设深度以切割出中间元件50;
60.其中,第一表面和第二表面相对设置,第一预设深度和第二预设深度之和不小于第一表面和第二表面之间的间距。
61.具体的,在本技术中,请参阅7至图9,目标结构为长宽尺寸为201*125mm、厚度尺寸为0.5mm的片状结构。目标结构包括玻璃基体10以及贴附与玻璃基体10上的膜材20,其中膜材20贴附于玻璃基体10的一个侧面上,当然,膜材20也可以贴附于玻璃基体10相对的两个侧面上,为了便于说明,在本技术中,以膜材20贴附于玻璃基体10的一个侧面为例进行说明。
62.膜材20包括四分之一玻片21、偏光片22和反射偏光片23,四分之一玻片21、偏光片22和反射偏光片23采用无色且透明的光学胶水依次层叠设于玻璃基体10的一个侧面上。
63.第一预设路径可根据需要进行设计,如第一预设路径为直线、开放的曲线或闭合的曲线,其中,当第一预设路径为直线开放的曲线时,该直线或开放的曲线由目标结构的周向的一个侧壁延伸至目标结构的沿周向的其它侧壁上。为了便于说明,在本技术的实施例中,以第一预设路径为闭合曲线为例进行说明。
64.在第一预设路径为闭合曲线时,闭合曲线的数目为两个,两个闭合曲线分别为第一曲线30和第二曲线40,其中,第一曲线30和第二曲线40形状相同,且第一曲线30所围绕的第一面积小于第二曲线40所围绕的第二面积,其中,第一面积对应目标元件60,第二面积对应中间元件50,且目标元件60的中心与所中间元件50的中心重合。
65.中间元件50和目标元件60的形状均为椭圆形。当然,中间元件50和目标元件60的形状也可以为圆形或三角形、四边形、五边形等多边形。为了便于说明,在本技术中,以中间元件50和目标元件60的形状均为椭圆形为例进行说明。
66.第一预设深度等于第一表面和第二表面之间间距的二分之一,第二预设深度等于第一表面和第二表面之间间距的二分之一。当然,第一预设深度也可以大于或小于第一表面和第二表面之间间距的二分之一,第二预设深度可以大于或小于第一表面和第二表面之间间距的二分之一。为了便于说明,在本技术中,以一预设深度等于第一表面和第二表面之间的间距的二分之一、第二预设深度等于第一表面和第二表面之间的间距的二分之一为例进行说明。
67.需要指出的是,每个目标结构上排列有两排中间元件50,每排中间元件50中有三个中间元件50,即每片目标结构可加工出6个中间元件50。
68.请参阅图1至图3,在本技术的实施例中,在步骤1将目标结构维持在预设温度范围内的步骤中,包括以下步骤:
69.步骤1.1,将目标结构在预设温度范围内进行预冷却;
70.步骤1.2,在所述预设温度范围内固定所述目标结构;
71.其中,所述预设温度范围内的温度位于12℃—14℃之间。
72.具体的,在申请的实施例中,在步骤1.1将目标结构容置于第一预设温度范围内进行预冷却的步骤中:采用冷却箱对目标结构进行预冷却,冷却箱内部形成有冷却空间,冷却空间通过冷却枪进行冷却,冷却枪是利用涡旋管冷却器对冷却空间注入冷却气体。其中,涡旋管冷却器将空气压缩变成冷涡旋流和热涡旋流,热涡旋流经抑制器发射并从热气出口排出,冷涡旋流由冷却枪进入冷却空间对冷却空间进行降温,直至冷却空间内的温度位于预设温度范围内。将目标结构放置在冷却空间内进行预冷却,直至目标结构的温度与冷却空间的温度一致。
73.在冷却空间内可同时放置4片目标结构,以使冷却空间同时对多件目标结构进行预降温。
74.具体的,在本技术的实施例中,在步骤1.2在所述预设温度范围内固定所述目标结构的步骤中:采用工作台对目标结构进行固定,工作台连接于沿x轴和y轴方向延伸的滚珠丝杠上,沿x轴和y轴方向延伸的滚珠丝杠上均设有驱动电机,驱动电机由计算机控制转动,从而使工作台可以沿x轴方向和y轴方向分别进行移动。
75.加工台通过真空吸附将目标结构进行固定,同时,该加工台上连接有冷却枪,用于在激光光束对中间元件50进行切割时对目标结构进行冷却,从而使目标结构在被激光光束切割的过程中,目标结构上的温度维持在预设温度范围内。
76.同时,在工作台沿x轴和y轴方向移动的过程中,采用光栅尺来确定工作台的位移,并将工作台的位移反馈至计算机,从而计算机控制驱动电机和滚珠丝杠驱动工作台进行精准的移动。
77.需要指出的是,x轴方向和y轴方向位于同一平面内,且x轴方向和y轴方向相互垂直。
78.作为优选的,在本技术的实施例中,冷却空间以及加工台上冷却枪的冷却温度为13℃。
79.在本技术的另一个实施例中,冷却空间以及加工台上冷却枪的冷却温度为12℃。
80.在本技术的另一个实施例中,冷却空间以及加工台上冷却枪的冷却温度为14℃。
81.在本技术的另一实施中,步骤1的实施方式为:可将目标结构容置于环境温度为13℃的恒温环境中进行预冷却,以及将工作台的工作环境设置为温度为13℃的恒温环境。
82.请参阅图1、图2和图4,在本技术的实施例中,步骤2通过激光沿第一预设路径由第一表面向内切割第一预设深度包括以下步骤:
83.步骤2.1,调整目标结构至第一预设位置;
84.步骤2.2,激光在第一表面沿第一预设路径和第一预设深度向内切割中间元件50。
85.具体的,在本技术的实施例中,在步骤2.1中调整目标结构至第一预设位置的步骤中:目标结构被固定在加工台上并位于第一预设位置,且此时,目标结构的平整度与预设平整度之间的误差值处于误差范围内,且第一表面朝向激光光束。
86.通过预设光线照射第一表面,以使预设光线在第一表面产生反射光线。通过激光测高仪接收反射光线,来判定目标结构的平整度与预设平整度之间的误差值是否在
±
0.02mm内。
87.当然,激光测高仪还可用于接收6个目标元件60的中心位置所反射的光线,并根据6个目标元件60的中心位置生成6个位置数据,可以在激光测高仪内部设定6个预设位置数据,6个位置数据与6个预设位置数据一一对应,且每个预设位置数据用于判定与其相对应的位置数据是否处于误差范围内,从而判定目标结构是否处于第一预设位置。同时,激光测高仪还根据反射光线测定目标结构的厚度,防止目标结构漏放或者多放。
88.在目标结构的平整度在误差范围内时,激光在第一表面沿第一预设深度切割中间元件50。
89.若第一表面的平整度不在误差范围内时,激光测高仪发出报警信息,以便于操作人员对目标结构进行调整。
90.在步骤2.2激光在第一表面沿第一预路径和第一预设深度向内切割中间元件50的步骤中:激光由激光器所产生,激光器输出波长为的532nm的激光光束,激光光束在经由扩束镜扩束后,再射入激光扫描器内x轴光学扫描头和y轴光学扫描头上,随后在经由激光扫描器内的电子驱动放大单元后,进入经由激光扫描器的x轴反射镜和y轴反射镜,随后激光扫描器在计算机控制下产生快速摆动,从而使激光光束在平面x轴方向以及y轴方向的两个向上进行扫描。
91.需要指出的是,激光光束聚焦形成一个微细且高能量密度的切割光斑,经过x轴反射镜和y轴反射镜反射后,激光光束在第一表面沿第一曲线30和第二曲线40以及第一预设深度切割中间元件50。
92.其中,激光器的发射激光的频率为1000khz,功率因数为85%—90%,且激光的切割速度位于380mm/s—400mm/s之间。
93.作为优选的,激光发射器的功率因数为90%,且激光的切割速度为400mm/s,即作用在目标结构上激光光束的频率为900khz。
94.在本技术的另一个实施例中,激光发射器的功率因数为85%,且激光的切割速度为380mm/s,即作用在目标结构上激光光束的频率为850khz。
95.在激光光束在第一表面沿第一预设深度对第一个中间元件50切割后,计算机控制固定台移动,使其余五个中间元件50依次移动至第一中间元件50被切割的部位,以使激光光束在第一表面对其余五个中间元件50依次沿第一预设深度进行切割。
96.在本技术的实施例中,在步骤2通过激光沿第一预设路径由第一表面向内切割第一预设深度的步骤中,还包括:
97.步骤2.3,激光在第一表面沿第二预设路径切割定位靶标。其中,根据定位靶标调整第二表面朝向激光。
98.具体的,在本技术的实施例中,在步骤2.3激光在第一表面沿第二预设路径切割定位靶标的步骤中:第二路径包括封闭的第三曲线和第四曲线的步骤中,其中,第三曲线所围绕区域对应第一定位靶标70,第四曲线所围绕区域对应第二定位靶标80,第一定位靶标70的面积大于第二定位靶标80的面积,且第一定位靶标70的形状和第二定位靶标80的形状相同或不同,以及第一定位靶标70和第二定位靶标80间隔设置。在本技术的中,为了便于说
明,以第一定位靶标70的形状和第二定位靶标80的形状相同为例进行说明。
99.第一定位靶标70的形状和第二定位靶标80的形状均为矩形,第一定位靶标70的长宽尺寸分别为5*2mm,第二定位靶标80的长宽尺寸分别为3*2mm。
100.请参阅图1、图2和图5,在本技术的实施例中,在步骤3通过激光沿第一预设路径由第二表面向内切割第二预设深度以切割出中间元件50的步骤中,包括以下步骤:
101.步骤3.1,通过定位靶调整目标结构至第二预设位置;
102.步骤3.2,激光在第二表面沿第一预设路径和第二预设深度向内切割中间元件50。
103.具体的,在本技术中,在步骤3.1通过定位靶调整目标结构至第二预设位置的步骤中,操作人员通过第一定位靶标70和第二定位靶标80的位置是否与靶标预设位置重合以初步判定目标结构的第二表面是否朝向激光光束。采用工业摄像机来确定目标结构是否处于第二预设位置,在目标结构处于第二预设位置时,第二表面朝向激光光束,第一定位靶标70和第二定位靶标80与靶标预设位置信息重合。
104.通过工业摄像机实时拍摄中间元件50和第一定位靶标70和第二定位靶标80的位置信息,并将第一定位靶标70和第二定位靶标80的位置信息与靶标预设位置信息进行比较,并判断第一定位靶标70和第二定位靶标80是否与靶标预设位置重合;若第一定位靶标70和第二定位靶标80与靶标预设位置重合,激光在第二表面沿第一预设路径以及第二预设深度向内切割中间元件50。
105.若第一定位靶标70和第二定位靶标80不与靶标预设位置重合,工业摄像机通过计算机调整工作在x轴和y轴方向上运动,第一定位靶标70和第二定位靶标80与靶标预设位置重合。
106.激光光束聚焦在第二表面形成一个个微细且高能量密度的切割光斑,经过x轴反射镜和y轴反射镜反射后,激光光束在第二表面沿第一曲线30和第二曲线40以及第二预设深度切割中间元件50。
107.在对第二表面的第一个中间元件50沿第二深度切割完成后,工作台计算机的驱动下在x轴和y轴方向上运动,以使激光光束在第二侧面上对其余五个中间元件50沿第二深度依次切割。
108.在本技术中,请参阅图1、图2和图6,该方法还包括:
109.步骤4,将中间区域51由中间元件50上分离以获取目标元件60。
110.在中间元件50中,通过在目标元件60的外围设置中间区域51,在激光光束对目标结构进行切割时,减少目标元件60上应力的形成,同时,在对中间元件50从目标结构上进行分离以及将中间区域51从目标元件60上分离时,提高目标元件60的良品率。
111.在本技术的实施例中,步骤4将中间区域51由中间元件50上分离以获取目标元件60的步骤中,包括以下步骤:
112.步骤4.1,将中间元件50由目标结构上分离;
113.步骤4.2,将中间区域51由目标元件60上分离。
114.在本技术的实施例中,在步骤4.1将中间元件50由目标结构上分离的步骤中:采用第一裂片治具将中间元件50由目标结构上分离。
115.在步骤4.2将中间区域51由目标元件60上分离的步骤中,采用第二裂片治具讲中间区域51从目标元件60分离。
116.在采用第一裂片治具将中间元件50由目标结构上分离以及采用第二裂片治具目标元件60由中间元件50上分离之前,需要采用压感纸对第一裂片治具和第二裂片治具进行平整度确认。
117.具体的,在本技术的实施例中,第一裂片治具包括第一固定平台和能够靠近或远离第一固定平台的第一上压合轴。其中,第一固定平台上设有形状和尺寸均与目标结构形状和尺寸均相同的第一固定结构,如固定槽,且第一固定结构上形成有6个第一容置腔,第一容置腔的形状与中间元件50的形状相同,且第一容置腔的尺寸不小于中间元件50的尺寸,且6个第一容置腔与目标结构上6个中间元件50的位置一一对应。第一压合轴上设有形状和尺寸均与中间元件50的形状和尺寸均相同的第一仿形硅胶头。且第一压合轴采用气缸驱动,从而实现第一压合轴驱动第一仿形硅胶头朝向第一固机构运动。
118.需要指出的是,第一固定平台可在在x轴和y轴方向上移动,如采用沿x轴和y轴方向延伸的滚珠丝杠驱动,沿x轴和y轴方向延伸的滚珠丝杠上,滚珠丝杠由驱动电机驱动,驱动电机由计算机控制转动,从而实现第一固定平台可在在x轴和y轴方向上移动。
119.第二裂片治具包括第二固定平台和能够靠近或远离第二固定平台的第二上压合轴。其中,第二固定平台上设有形状和尺寸均与中间元件50形状和尺寸均相同的第二固定结构,如固定槽,且第二固定结构上形成有第二容置腔,第二容置腔的形状与目标元件60的形状均相同,且第二容置腔的尺寸不小于目标元件60的尺寸。第二压合轴上设有形状和尺寸均与目标元件60的形状和尺寸均相同的第二仿形硅胶头。且第二压合轴采用气缸驱动,从而实现第二压合轴驱动第二仿形硅胶头朝向第二固机构运动。
120.在进行步骤4.1将中间元件50由目标结构上分离的步骤之前,将压感纸放置在第一固定结构上,气缸驱动第一压合轴带动第一仿形硅胶头压合于压感纸,随后气缸驱动第一压合轴带动第一仿形硅胶头与压感纸分离,通过对压感纸上的显色,来分析第一仿形硅胶头在对中间元件50从目标结构上分离时第一仿形硅胶头作用在中间元件50上的压力平衡状况、压力分布、压力大小等情况。
121.如第一仿形硅胶头在压感纸上的压合部位的颜色分布均匀,则认为第一仿形硅胶头将中间元件50从目标结构上进行分离的效果最好,否则,需要调节第一仿形硅胶头的移动速度和硬度,直至第一仿形硅胶头在压感纸上的压合部位的颜色分布满足要求。
122.作为优先的,在本技术中,第一仿形硅胶头的移动速度为1mm/s,且硬度为80度。
123.在步骤4.1将中间元件50由目标结构上分离的步骤中,气缸驱动第一压合轴带动第一仿形硅胶头以1mm/s朝向第一固定平台运动至与中间元件50抵接,从而将中间元件50从目标结构上分离。
124.第一仿形硅胶头在将目标结构上第一个中间元件50与目标结构分离后,第一固定平台驱动其余五个中间元件50分别依次与第一仿形硅胶头抵接,从而实现将目标结构上6个中间元件50均从目标结构上分离。
125.在本技术的另一个实施例中,第一仿形硅胶头的数目为6个,6个第一仿形硅胶头与目标结构上6个中间元件50的位置一一对应,且6个第一仿形硅胶头同时将目标结构上6个中间元件50从目标结构上分离。
126.在进行步骤4.2将中间区域51由目标元件60上分离的步骤之前,将压感纸放置在第二固定结构上,气缸驱动第二压合轴带动第二仿形硅胶头压合于压感纸,随后气缸驱动
第二压合轴带动第二仿形硅胶头与压感纸分离,通过对压感纸上的显色,来分析第二仿形硅胶头在对目标元件60从中间元件50上分离时第二仿形硅胶头作用在目标元件60上的压力平衡状况、压力分布、压力大小等情况。如第二仿形硅胶头在压感纸上的压合部位的颜色分布均匀,则认为第二仿形硅胶头将目标元件60从中间元件50上进行分离的效果最好,否则,需要调节第二仿形硅胶头的移动速度和硬度,直至第二仿形硅胶头在压感纸上的压合部位的颜色分布满足要求。
127.作为优先的,在本技术中,第二仿形硅胶头的移动速度为1mm/s,且硬度为80度。
128.在进行步骤4.2将中间区域51由目标元件60上分离的步骤中,气缸驱动第二压合轴带动第二仿形硅胶头以1mm/s朝向第二固定平台运动至与目标元件60抵接,从而将目标元件60从中间元件50上分离。
129.与现有技术相比,本技术切割方法包括将目标结构维持在预设温度范围内、通过激光沿第一预设路径由第一表面向内切割第一预设深度、通过激光沿第一预设路径由第二表面向内切割第二预设深度以切割出中间元件50;其中,第一表面和第二表面相对设置,第一预设深度和第二预设深度之和不小于第一表面和第二表面之间的间距;采用上述步骤,通过将目标结构放置在预设温度范围内对目标结构进行降温,从而使目标结构在被激光切割时吸收激光的部分热量;通过在两个侧面内对目标结构进行切割,与现有技术中采用激光在目标结构上一个侧面进行切割的技术方案相比,在两个侧面内对目标结构进行切割,能够防止目标结构的同一侧面吸收过多的热量,防止激光在对目标结构进行切割时因局部快速升温而导致的目标结构产生气泡、黑点、形变和目标结构破碎等问题,从而提高目标结构的良品率。
130.第二方面,本技术提供一种光学元件,该光学元件有上述任意一项切割方法切割而成。
131.具体的,请参阅图9,在本技术的实施中,光学元件椭圆形的片状结构。光学元件包括玻璃基体10以及贴附与玻璃基体10上的膜材20,其中膜材20贴附于玻璃基体10的一个侧面上,当然,膜材20也可以贴附于玻璃基体10相对的两个侧面上,为了便于说明,在本技术中,以膜材20贴附于玻璃基体10的一个侧面为例进行说明。
132.膜材20包括四分之一玻片21、偏光片22和反射偏光片23,四分之一玻片21、偏光片22和反射偏光片23采用无色且透明的光学胶水依次层叠设于玻璃基体10的一个侧面上。
133.与现有技术相比,本技术所提供的光学元件采用上述任意一项实施例所提供的切割方法切割而成,通过将光学元件构放置在预设温度范围内进行降温,从而使光学元件在被激光切割时吸收激光的部分热量;通过在两个侧面内对光学元件进行切割,与现有技术中采用激光在光学元件上一个侧面进行切割的技术方案相比,在两个侧面内对光学元件进行切割,能够防止光学元件的同一侧面吸收过多的热量,防止激光在对光学元件进行切割时因局部快速升温而导致的光学元件产生气泡、黑点、形变和光学元件破碎等问题,从而提高目标结构的良品率。
134.以上仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
