1.本发明涉及超精密加工设备技术领域,尤其涉及一种超精密车削加工系统。
背景技术:
2.随着科学技术的发展,各种机床设备的需求量越来越多,对机床设备的精度要求也越来越高。
3.在超精密加工领域中,为了实现极高的精度,现有的加工方式是通过车削与研磨相结合的方式来完成对工件的加工的。首先通过车削的方式粗加工出工件的大致面型,然后再通过研磨的方式来对面型进一步打磨,以提高精度。
4.随着高精度加工主轴的出现,可以直接通过车削的方式完成对工件的超高精度加工。现有的加工主轴中通常通过设置气浮结构来提高加工精度。同时为了便于装夹待加工工件,会在加工主轴上安装负压夹具。但是,负压夹具对应的负压气路会与加工主轴的气浮结构的气路形成相互干扰,进而降低气浮结构的稳定性,以及降低负压夹具的吸附稳定性。
技术实现要素:
5.有鉴于此,本发明提供一种超精密车削加工系统,至少部分解决现有技术中存在的问题。
6.根据本发明的一个方面,提供了一种超精密车削加工系统,包括气浮主轴机构,气浮主轴机构用于提供旋转运动。气浮主轴机构包括:旋转主轴,为中空结构。旋转主轴上设置有负压气道,负压气道用于使旋转主轴端部形成负压。旋转主轴的外侧壁上开设有排气凹槽。
7.主轴定子,转动套设于旋转主轴上,用于形成气浮间隙。主轴定子的内径大于旋转主轴的外径。
8.主轴定子内设置有第一气道、第二气道及第三气道。第二气道与排气凹槽联通,用于将排气凹槽中的气体排出。第一气道与负压气道联通,用于将负压气道中的气体排出。第三气道与气浮间隙联通,用于为气浮间隙供气。
9.第二气道的进气口位于第一气道的进气口与第三气道的出气口之间。
10.进一步的,主轴定子的外侧壁上开设有多个气压平衡凹槽。
11.第一气道、第二气道及第三气道分别与对应的气压平衡凹槽联通。
12.进一步的,负压气道包括:负压平衡凹槽,设置于旋转主轴的外侧壁上。
13.多个负压子气道,均设置于旋转主轴上。且每一负压子气道两端口分别与负压平衡凹槽及旋转主轴内侧壁联通。
14.进一步的,气浮主轴机构还包括:第一旋转电机,与旋转主轴相连接。
15.第一水冷套盖,套设于第一旋转电机外侧。第一水冷套盖上开设有水冷凹槽。以及
第二水冷套盖,套设于第一水冷套盖外侧,第二水冷套盖上设有进水口及出水口,进水口及出水口均与水冷凹槽相连通。
16.进一步的,气浮主轴机构还包括:定子套筒,套设于主轴定子外侧。定子套筒中开设有多个连接气道,每一连接气道与对应的气压平衡凹槽相连通。连接气道用于为气压平衡凹槽提供对应压力的气体。
17.负压夹具,固定连接于旋转主轴的其中一端,旋转主轴远离负压夹具的一端密封设置,负压夹具的负压腔室与旋转主轴的中空内腔相连通。
18.进一步的,还包括:加工平台,用于安置加工设备。气浮主轴机构固定设置于加工平台上。
19.第一刀具移动机构,与加工平台固定连接,用于带动刀具沿第一直线方向移动。
20.第二刀具移动机构,与第一刀具移动机构固定连接,用于带动刀具沿第二直线方向移动。第一直线方向与第二直线方向不同,第一直线方向与第二直线方向构成的平面与原料的旋转轴线平行。
21.第一刀具移动机构及第二刀具移动机构中相邻的运动部件与固定部件之间设置有气浮结构。
22.进一步的,第一刀具移动机构包括:第一直线滑轨,固定设置于加工平台上。
23.第一滑块,滑动套设于第一直线滑轨上,第一滑块与第一直线滑轨之间形成第一滑动间隙。第一滑块内部设置有多个送气通道,每一送气通道的一端与第一滑动间隙联通,另一端与第一滑块的进气孔相连通。
24.第一直线电机,连接于第一直线滑轨与第一滑块之间,用于带动第一滑块在第一直线滑轨上移动。
25.进一步的,第二刀具移动机构包括:第二直线滑轨,固定设置于第一滑块上。
26.第二滑块,滑动穿设于第二直线滑轨内,第二滑块与第二直线滑轨之间形成第二滑动间隙。第二直线滑轨内部设置有多个送气通道,每一送气通道的一端与第二滑动间隙联通,另一端与第二直线滑轨的进气孔相连通。
27.第二直线电机,连接于第二直线滑轨与第二滑块之间,用于带动第二滑块在第二直线滑轨上移动。以及刹停机构,固定设置于第二直线滑轨上,用于限制第二直线滑轨与第二滑块发生相对移动。
28.进一步的,加工平台包括:放置台面,与气浮主轴机构及第一刀具移动机构均固定连接。
29.平台支架,平台支架与放置台面之间通过多个气动隔震器进行连接。
30.进一步的,气浮主轴机构、第一刀具移动机构及第二刀具移动机构中的运动部件与固定部件之间均设置有传感器,传感器用于检测运动部件与固定部件之间的位置信息及速度信息。
31.本发明的有益效果如下:本发明中,主轴定子的内径大于旋转主轴的外径,由此可以在旋转主轴与主轴定
子之间形成气浮间隙,以便形成保证加工精度的气浮结构。
32.同时在旋转主轴上设置有负压气道及排气凹槽。排气凹槽、负压气道及气浮间隙分别与对应的第一气道、第二气道及第三气道相连通。且第二气道的进气口位于第一气道的进气口与第三气道的出气口之间。由此,在工作时,第三气道会向气浮间隙中供气,以形成气浮结构,将旋转主轴与主轴定子进行分离。同时,第二气道通过负压气道将旋转主轴内部空腔中的气体抽出,进而在旋转主轴的端部形成负压,以便于为负压夹具提供相应的负压吸附力。本发明中负压夹具的气路与气浮结构的气路,均通过旋转主轴与主轴定子的结构配合完成设置。由此可以节省气路的空间占用。
33.另外,负压夹具的气路与气浮结构的气路具有连通之处,由于两条气路之间的气压存在差异,相互之间容易形成干扰,造成不稳定的问题。本发明中在负压气道与气浮结构的进气口之间,设置了排气凹槽,并通过第一气道使排气凹槽与外界相联通。由此,在工作过程中,气浮间隙中多余的气体会聚集在排气凹槽中,并由第一气道溢出。另外,在排气凹槽与负压气道之间还存在一定长度的气浮间隙。由于该气浮间隙较小,所以也会具有一定的密封性。由此,虽然在工作过程中,排气凹槽出的气压与已形成的气浮结构处的气压存在较大的差异,但是由于排气凹槽的缓冲,以及排气凹槽与负压气道之间的气浮间隙的密封限制。会大幅降低负压夹具对应的负压气路与气浮结构的气路之间的相互干扰。由此,可以保证在较小的气路空间占用下,既可以提高气浮结构的稳定性,还可以提高负压夹具的吸附稳定性。
附图说明
34.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
35.图1为本技术另一实施例中一种超精密车削加工系统中的气浮主轴机构的总体结构示意图;图2为本技术另一实施例中气浮主轴机构中部分结构的局部剖视示意图;图3为本技术另一实施例中气浮主轴机构中的电机水冷结构分解示意图;图4为本技术另一实施例中一种超精密车削加工系统中的第一刀具移动机构的总体结构示意图;图5为本技术另一实施例中第一刀具移动机构的分解结构示意图;图6为本技术一实施例中一种用于超精密车削加工的刀具控制机构的总体结构示意图;图7为本技术另一实施例中刀具控制机构的部分分解结构示意图;图8为本技术另一实施例中刀具控制机构去除柔性防护套后的正视示意图;图9为图8中a处的结构放大图;图10为本技术另一实施例中一种超精密车削加工系统(无防护外罩)的总体结构示意图;图11为本技术另一实施例中一种超精密车削加工系统(有防护外罩)的总体结构示意图。
36.附图标记1、防护外罩;21、放置台面;22、气动隔震器;23、平台支架;3、气浮主轴机构;31、旋转主轴;311、负压子气道;312、排气凹槽;313、负压平衡凹槽;32、主轴定子;321、第一气道;322、第二气道;323、第三气道;33、定子套筒;34、负压夹具;341、负压腔室;342、环形负压槽;35、气浮间隙;36、第二水冷套盖;37、第一水冷套盖;371、水冷凹槽;4、第一刀具移动机构;41、柔性防护套;42、第一直线滑轨;43、第一滑块;431、滑块盖板;432、滑块侧板;433、滑块底板;44、第一直线电机;45、第一滑动间隙;5、第二刀具移动机构;51、滑轨盖板;511、上滑轨盖板;512、侧滑轨盖板;513、下滑轨盖板;514、第一溢气凹槽;52、第二直线电机;53、第二滑块;531、安置凹槽;532、第二溢气凹槽;54、刹停气缸;55、第二滑动间隙;6、光栅传感器;7、送气通道。
具体实施方式
37.下面结合附图对本发明实施例进行详细描述。
38.需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。并且,基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
39.需要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
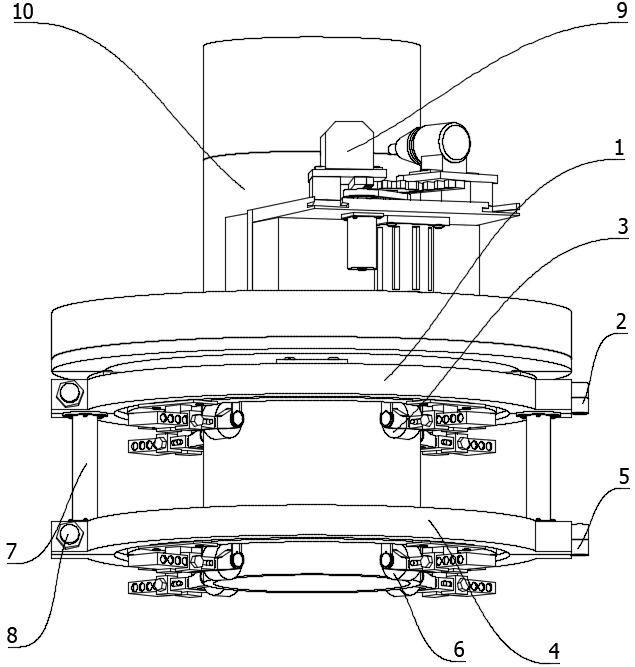
40.根据本发明的一个方面,如图1至图3及图10所示,提供了一种超精密车削加工系统,包括气浮主轴机构3,气浮主轴机构3用于提供旋转运动。气浮主轴机构3包括:如图2所示,旋转主轴31,为中空结构。旋转主轴31上设置有负压气道,负压气道用于使旋转主轴31端部形成负压。旋转主轴31的外侧壁上开设有排气凹槽312。
41.优选的,负压气道包括:负压平衡凹槽313,设置于旋转主轴31的外侧壁上。
42.多个负压子气道311,均设置于旋转主轴31上。且每一负压子气道311两端口分别与负压平衡凹槽313及旋转主轴31内侧壁联通。负压子气道311为沿旋转主轴31径向开设的通槽。
43.由于旋转主轴31及主轴定子32均是截面为环形的转轴。所以开设在其外侧圆周壁上的凹槽,均为环形凹槽。
44.对应的在完成组装后负压平衡凹槽313与多个负压子气道311均联通,由此便于保证每一个负压子气道311的进气口处的气压保持一直。对应的,本发明中开设的各个与子气道相连通的环形凹槽,均是为了平衡各个子气道出的气压,以保证各处气压的一致性。如排气凹槽312是为了保证与其连接的第一气道321中的各个径向布置的子气道的气压的一致性。
45.如图2所示,主轴定子32,转动套设于旋转主轴31上,用于形成气浮间隙35。主轴定子32的内径大于旋转主轴31的外径。
46.主轴定子32的内径大于旋转主轴31的外径,由此可以在旋转主轴31与主轴定子32之间形成气浮间隙35,以便形成保证加工精度的气浮结构。
47.主轴定子32内设置有第一气道321、第二气道322及第三气道323。第二气道322与排气凹槽312联通,用于将排气凹槽312中的气体排出。第一气道321与负压气道联通,用于将负压气道中的气体排出。第三气道323与气浮间隙35联通,用于为气浮间隙35供气。第二气道322的进气口位于第一气道321的进气口与第三气道323的出气口之间。
48.优选的,如图2所示,主轴定子32的外侧壁上开设有多个气压平衡凹槽。
49.第一气道321、第二气道322及第三气道323分别与对应的气压平衡凹槽联通。
50.每一气压平衡凹槽均是为了保证其对应连接的第一气道321或第二气道322或第三气道323中气压的一致性。
51.由于,第一气道321、第二气道322及第三气道323之间的需要提供的气体压力存在较大差异。具体为,第一气道321的压力可以与大气压保持一致,第二气道322需要的是小于大气压的负压,而第三气道323则需要大于大气压的正压。所以,为了保证各个气道之间的压力互不影响,进一步的,可以在不同的气压平衡凹槽之间设置密封圈。具体的,密封圈套设在主轴定子32的外侧壁上,以夹设在主轴定子32与定子套筒33之间。
52.根据本实施例的方案可知,在旋转主轴31上设置有负压气道及排气凹槽312。排气凹槽312、负压气道及气浮间隙35分别与对应的第一气道321、第二气道322及第三气道323相连通。且第二气道322的进气口位于第一气道321的进气口与第三气道323的出气口之间。由此,在工作时,第三气道323会向气浮间隙35中供气,以形成气浮结构,将旋转主轴31与主轴定子32进行分离。同时,第二气道322通过负压气道将旋转主轴31内部空腔中的气体抽出,进而在旋转主轴31的端部形成负压,以便于为负压夹具34提供相应的负压吸附力。本发明中负压夹具34的气路与气浮结构的气路,均通过旋转主轴31与主轴定子32的结构配合完成设置。由此可以节省气路的空间占用。
53.另外,负压夹具34的气路与气浮结构的气路具有连通之处,由于两条气路之间的气压存在差异,相互之间容易形成干扰,造成不稳定的问题。本发明中在负压气道与气浮结构的进气口之间,设置了排气凹槽312,并通过第一气道321使排气凹槽312与外界相联通。由此,在工作过程中,气浮间隙35中多余的气体会聚集在排气凹槽312中,并由第一气道321溢出。另外,在排气凹槽312与负压气道之间还存在一定长度的气浮间隙35。由于该气浮间隙35较小,所以也会具有一定的密封性。由此,虽然在工作过程中,排气凹槽312出的气压与已形成的气浮结构处的气压存在较大的差异,但是由于排气凹槽312的缓冲,以及排气凹槽312与负压气道之间的气浮间隙35的密封限制。会大幅降低负压夹具34对应的负压气路与气浮结构的气路之间的相互干扰。由此,可以保证在较小的气路空间占用下,既可以提高气浮结构的稳定性,还可以提高负压夹具34的吸附稳定性。
54.当本实施例中的方案适用于具有更大长度的旋转主轴31的气浮主轴机构3时,如图2所示,其对应的第一气道321、第二气道322及第三气道323的设置如下:第一气道321包括两个第一子气道。
55.第三气道323包括连接气道,及与连接气道均连通的多个供气子气道。通过连接气
道将形成的气垫的气体,均匀的输送至各供气子气道中,再由供气子气道的出口送入气浮间隙35中。
56.且两个第一子气道及多个供气子气道均关于第二气道322对称分布。
57.由于,旋转主轴31的加长所以对应的气浮结构的面积也要对应的增加,此时供气子气道需要设置为多个,以便气体可以及时的填充气浮间隙35。通过对称设置可以进一步保证整个旋转主轴31两端的气压保持一致,进而进一步保证旋转主轴31的转动平稳性。
58.作为本发明的一个实施例,如图3所示,气浮主轴机构3还包括:第一旋转电机,与旋转主轴31相连接。用以带动旋转主轴31转动。
59.同时,可以在第一旋转电机的动子与定子之间设置光栅,以获得旋转主轴31的位置信息及速度信息。
60.第一水冷套盖37,套设于第一旋转电机外侧。第一水冷套盖37上开设有水冷凹槽371。以及第二水冷套盖36,套设于第一水冷套盖37外侧,第二水冷套盖36上设有进水口及出水口,进水口及出水口均与水冷凹槽371相连通。水冷凹槽371可以设置为连续s型凹槽,以此来形成更大面积的水冷凹槽371,进而更多的将第一旋转电机产生的热量带走。
61.对应的,本发明中在负压气道与气浮结构的进气口之间,设置了排气凹槽312,并通过第一气道321使排气凹槽312与外界相联通。在工作过程中,气浮间隙35中多余的气体会聚集在排气凹槽312中,并由第一气道321溢出。由此,也形成了由第三气道323
‑‑
气浮间隙35
‑‑
第一气道321的冷却气路,可以及时带走旋转主轴31运动过程中产生的热量。
62.进一步的,如图2所示,气浮主轴机构3还包括:定子套筒33,套设于主轴定子32外侧。定子套筒33中开设有多个连接气道,每一连接气道与对应的气压平衡凹槽相连通。连接气道用于为气压平衡凹槽提供对应压力的气体。
63.每一连接气道的一端与对应的气压平衡凹槽相连通,另一端与外界的对应的供气接头相连接。
64.负压夹具34,固定连接于旋转主轴31的其中一端,旋转主轴31远离负压夹具34的一端密封设置,负压夹具34的负压腔室341与旋转主轴31的中空内腔相连通。
65.如图1及图2所示,本实施例中的负压夹具34包括:夹具主体,固定连接在旋转主轴31的一端;夹具主体中心设置有圆锥形的第一负压腔室341,以及沿夹具主体径向设置的第二负压腔室341。第一负压腔室341与第二负压腔室341相连通。第一负压腔室341与旋转主轴31的内部空腔相连通。
66.多个环形负压槽342,开设在夹具主体的同一侧端面,多个环形负压槽342同心设置。每一环形负压槽342的底部开设有负压孔;该负压孔与第二负压腔室341相连通。
67.负压调节柱,穿设于所述二负压腔室341中,用以调节夹具主体上形成负压的区域。
68.本实施例中的负压夹具34与旋转主轴31刚性连接,由此该夹具可以适应于更高的加工速度。且负压夹具34上的负压区域的压力大小不会受到加工主轴转速的影响。所以本实施例中的夹具可以适用于具有更高主轴转速的加工场景中。
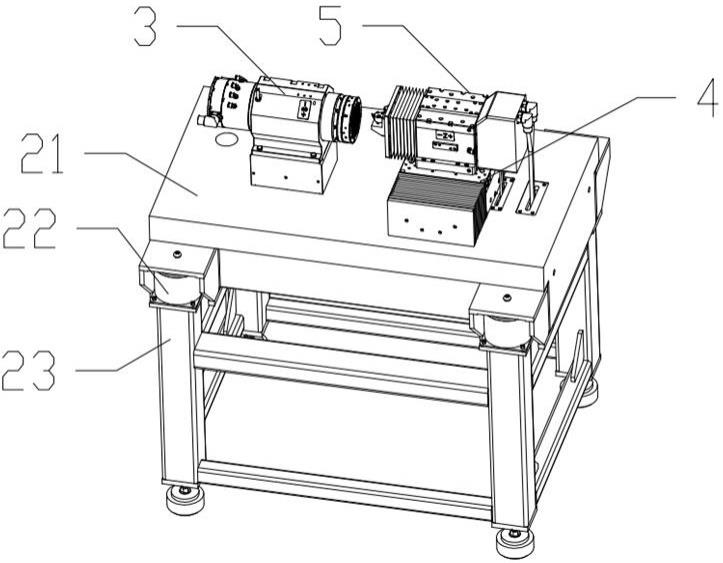
69.作为本发明的一种实施例,如图10及图11所示,该加工系统还包括:加工平台,用于安置加工设备。气浮主轴机构3固定设置于加工平台上。
70.第一刀具移动机构4,与加工平台固定连接,用于带动刀具沿第一直线方向移动。
71.第二刀具移动机构5,与第一刀具移动机构4固定连接,用于带动刀具沿第二直线方向移动。第一直线方向与第二直线方向不同,第一直线方向与第二直线方向构成的平面与原料的旋转轴线平行。
72.第一刀具移动机构4及第二刀具移动机构5中相邻的运动部件与固定部件之间设置有气浮结构。
73.优选的,运动部件与固定部件之间的间隙的宽度h符合如下条件:0.01mm≤h≤0.02mm。该间隙宽度既可以保证形成的气垫具有一定的刚度,同时也可以尽量避免外界因素对运动部件的干扰。
74.本实施例中,气浮主轴机构3可以带动代加工原料进行旋转运动。第一刀具移动机构4及第二刀具移动机构5,可以带动车削刀具在目标平面内移动。以此来完成工件的加工。
75.同时,为了提高加工精度,在气浮主轴机构3、第一刀具移动机构4及第二刀具移动机构5中,相邻的运动部件与固定部件之间的间隙中均充填有气体。也即,在上述加工部件的运动部件与固定部件之间,不再设置其他的连接结构,仅通过填充气体来进行连接。对应的,当在间隙中充填气体后,运动部将与固定部件之间便不再之间接触。由此,由振动或部件之间的相互摩擦产生的干扰就会大幅减小,可以进一步保证运动部件的平稳性,进而可以大幅提高加工精度,通常可以将误差控制在15nm之内。
76.在此精度基础上,可以直接通过本实施例中的车削加工系统,将工件加工至目标型面,无需进行再次研磨抛光,即可达到精度要求。由此,可以节省工艺步骤,提高效率。同时,通过车削加工完成的工件相对于抛光完成的工件而言,具有更高产品一致性。
77.作为本发明的另一个实施例,如图4及图5所示,第一刀具移动机构4包括:第一直线滑轨42,固定设置于加工平台上。
78.第一直线滑轨42包括为一个截面为一个t字型滑轨主体,及两个截面均为方形的滑轨副体。两个滑轨副体分别固定设置于滑轨主体的横向部分的上表面。两个滑轨副体与滑轨主体形成一个放置凹槽。该放置凹槽用于安置第一直线电机44。优选的,两个滑轨副体与滑轨主体一体成型设置。
79.第一滑块43,滑动套设于第一直线滑轨42上,第一滑块43与第一直线滑轨42之间形成第一滑动间隙45。第一滑块43内部设置有多个送气通道7,每一送气通道7的一端与第一滑动间隙45联通,另一端与第一滑块43的进气孔相连通。第一滑动间隙45的宽度h符合如下条件:0.01mm≤h≤0.02mm。
80.如图5所示,第一滑块43包括一个滑块盖板431、两个滑块侧板432及两个滑块底板433,两个滑块侧板432固定连接于滑块盖板431的相对两端,两个滑块底板433分别连接在两个滑块侧板432上。第一滑块43围合成一个一侧具有开口的滑槽,该滑槽用于滑动穿设第一直线滑轨42。同时,滑块盖板431上还设置有一个放置凹槽,该放置凹槽与第一直线滑轨42上的放置凹槽相对应,用于安置第一直线电机44。以及放置对应的位置速度传感器。
81.本实施例中,第一滑块43的位置一直在发生变化。在该结构中,为了可以实现在第一滑块43移动过程中,可以在第一滑块43与第一直线滑轨42之间保持一个稳定的第一滑动间隙45。所以将送气通道7设置在第一滑块43上,且该送气通道7均是向滑槽中供气,由于滑槽中穿设有第一直线滑轨42,所以滑槽所在位置即为第一滑动间隙45形成的位置。由此,可
以保证气浮结构可以实时跟随第一滑动间隙45,由此保证第一滑动间隙45可以在运动过程中一直稳定存在。
82.另外,由于第一滑块43的上方会安置其他机构,由此也使得第一滑块43所在位置处需要更大的气压来进行支撑,以形成对应的第一滑动间隙45。若选择将送气通道7设置在第一直线滑轨42上,则不容易控制第一直线滑轨42各个位置的气压。也即,气体会更容易从不是第一滑块43所覆盖的区域溢出。由此也不便于对第一滑动间隙45宽度的保持,导致精度降低。同时也会造成气体的浪费。
83.而本实施例中,选择将送气通道7设置在第一滑块43上。由此,可以仅在第一滑块43所在的位置处形成气浮结构,且由于第一滑块43所在的位置处的外界压力基本一致,且气体无效外溢的量更小,所以会更加容易控制第一滑动间隙45中的气压。由此也便于对第一滑动间隙45宽度的保持,进而提高精度降低。同时也会节省气体。
84.如图4及图5所示,第一直线电机44,连接于第一直线滑轨42与第一滑块43之间,用于带动第一滑块43在第一直线滑轨42上移动。
85.另外,在第一直线滑轨42与第一滑块43之间还连接有柔性防护套41,用于防止异物及进入。该柔性防护套41可以为现有的风琴式防护罩,其材质可以为布等柔软度较高的材质。优选的,柔性防护套41的材质为三防布。该材质更加柔软,折叠变形更加容易,进而可以减少第一滑块43在移动时的阻力,进一步保证第一刀具移动机构4可以具有更高的精度。
86.本实施例中滑块盖板431、滑块侧板432及滑块底板433上均开设有多个送气通道7,且送气通道7设有多个通往第一滑动间隙45的送气开口。当滑块盖板431、滑块侧板432及滑块底板433固定连接至一体后,其中的多个送气通道7相连通,由此气体可以从多个送气开口均匀的注入第一滑动间隙45,进而可以更好的保证第一滑动间隙45中的各处的气压的一致性,以进一步提高架设在第一滑动间隙45上的第一滑块43,在运动时的稳定性。进而提高最终的加工精度。
87.作为本发明的另一个可能的实施例,如图6及图9所示,第二刀具移动机构5可以为一种用于超精密车削加工的刀具控制机构,该刀具控制机构包括:第二直线滑轨,用于与其他移动机构进行固定,以及为第二滑块53提供轨道。
88.如图7及图8所示,第二直线滑轨包括多个滑轨盖板51,多个滑轨盖板51拼接成一个滑动壳体,滑动壳体内部围合成一个方形的滑动空腔,以放置第二滑块53。该滑动空腔的前后两端不设置滑轨盖板51,以便于第二滑块53进行大范围的滑移。
89.其中,多个滑轨盖板51分别包括上滑轨盖板511、下滑轨盖板513及两个侧滑轨盖板512。
90.第二直线电机52的动子固定设置于上滑轨盖板511上。
91.第二滑块53,滑动穿设于第二直线滑轨内,第二滑块53与第二直线滑轨之间形成第二滑动间隙55。第二直线滑轨内部设置有多个送气通道7,每一送气通道7的一端与第二滑动间隙55联通,另一端与第二直线滑轨的进气孔相连通。
92.优选的,第二滑块53为与滑动空腔形状相适应的矩形柱体。且第二滑块53的体积小于滑动空腔的体积,由此可以形成第二滑动间隙55,该间隙的宽度h符合如下条件:0.01mm≤h≤0.02mm。
93.同时,为了放置直线电机,如图7所示,需要在第二滑块53上开设一个对应的安置
凹槽531。由此,第二滑块53可以为一个截面为u型的柱体滑块。
94.第二直线电机52,连接于第二直线滑轨与第二滑块53之间,用于带动第二滑块53在第二直线滑轨上移动。
95.优选的,第二直线电机52设置为具有更大行程的u型槽式直线电机。第二直线电机52的动子与第二直线滑轨中的上滑轨盖板511相连接,第二直线电机52的定子磁轨固定于第二滑块53的安置凹槽531中。选择具有更大行程的u型槽式直线电机,可以增大第二滑块53在第二直线滑轨上的移动范围。
96.本实施例中,第二滑块53是嵌设在第二滑动间隙55中,其外侧壁面周围均是填充的气体以形成气垫。由于该气垫的范围更大,所以可以保证第二滑块53具有更高的独立性,可以尽可能的避免与其他结构的接触,进而降低其他外部干扰对第二滑块53稳定性的影响。且本实施例中的结构所构成的第二滑动间隙55的范围较大,所以形成的气垫也更大,进而该气垫对第二滑块53的支撑刚性也更强,可以尽量减少刀具在进行切削加工时,工件的反作用力对刀具姿态的影响。
97.由于,切削刀具固定连接在第二滑块53上,所以需要保证第二滑块53具有更高的抗干扰性,以提高精度。并且在加工过程中,刀具会受到工件的反坐作用力的影响,极有可能会造成刀具的姿态变化,所以还需要第二滑块53具有更高的刚性,以减少反作用力造成的姿态变化。为了同时满足上述要求,本实施例通过增加第二滑动间隙55的范围,来增加气垫的大小,以实现较高的抗干扰能力及较高的支撑刚性。
98.如图7及图8所示,刹停气缸54,刹停气缸54的缸体固定设置于第二直线滑轨上。且刹停气缸54的活动端朝向第二滑块53一侧。用于限制第二直线滑轨与第二滑块53发生相对移动。
99.优选的,刹停气缸54的缸体固定在一个侧滑轨盖板512的第一溢气凹槽514中。且刹停气缸54的活动端朝向第二滑块53一侧。当刹停气缸54的活动端伸出后,会抵设在第二滑块53上对应的第二溢气凹槽532中。
100.当刹停气缸54的活动端伸出后,会挤压第二滑块53,直至第二滑块53与第二直线滑轨的侧滑轨盖板512相接触。由此,通过第二滑块53与第二直线滑轨之间的摩擦力,可以防止第二直线滑轨与第二滑块53发生相对移动。该结构设置可以保证设备在运行故障时,及时锁定第二直线滑轨与第二滑块53之间的相对位置,也即锁定固定在第二刀具移动机构5上的刀具的位置。以防止刀具在异常情况下发生损坏。
101.本实施例中,多个滑轨盖板51上均开设有多个送气通道7,且送气通道7设有多个通往第二滑动间隙55的送气开口。当滑轨盖板51固定连接至一体后,其中的多个送气通道7相连通,由此气体可以从多个送气开口均匀的注入第二滑动间隙55,进而可以更好的保证第二滑动间隙55中的各处的气压的一致性,以进一步提高安置在第二滑动间隙55上的第二滑块53,在运动时的稳定性。进而提高最终的加工精度。
102.作为本发明一种可能的实施例,如图8所示,该刀具控制机构还包括:光栅传感器6及柔性防护套41。
103.柔性防护套41可以为风琴式防护罩,可以防止异物进入,设置在第二直线滑轨与第二滑块53之间。
104.光栅传感器6,固定设置于与刹停气缸54相对的第一溢气凹槽514及第二溢气凹槽
532中。用来采集第二滑块53与第二直线滑轨之间的位置信息。
105.本实施例中由于安装刹停气缸54及光栅传感器6所占用的面积不同,会导致两个侧滑轨盖板512分别与第二滑块53之间形成的气浮结构的面积不同,由于本实施例中的第二直线滑轨中的气路均相同,所以不同的气浮结构的面积,会导致第二滑块53两侧的压力不同。在该状态下当第二滑块53在第二直线滑轨中移动时会产生震动,不利于刀具的稳定性。为解决该问题,本实施例中,在两个侧滑轨盖上开设第一溢气凹槽514,并在第二滑块53的两侧壁上开设第二溢气凹槽532。由于,第一溢气凹槽514与第二溢气凹槽532之间围合的空腔具有更大的空间体积,所以气体在该位置无法形成需要的气浮结构。由此,通过此设置可以保证两侧的气浮结构面积的一致性。
106.同时,如图7及图8所示,可以将安装刹停气缸54及光栅传感器6安装在第一溢气凹槽514与第二溢气凹槽532所在的位置。进而减少对两侧的气浮结构的影响。
107.另外,由于要在上滑轨盖板511安装第二直线电机52,所以在本实施例中上滑轨盖板511与第二滑块53之间形成的气浮结构的面积较小,而下滑轨盖板513与第二滑块53之间形成的气浮结构的面积较大。
108.下部的气浮结构由于具有更大的面积,所以具有更大的承载力,可以用来负载第二滑块53及安装在第二滑块53上的刀具的重力,以及上滑轨盖板511的气压力。
109.随着由于第二滑块53上安装有刀具,所以其整体的重心更加偏向刀具一侧。当第二滑块53伸出后其重心会更远的偏离第二直线滑轨。进而形成一个类似于长悬臂梁的结构,此时刀具会有更大的向下偏转的趋势,也即低头效应。由此随着第二滑块53伸出刀具的位置偏移会增大,进而影响精度。
110.本实施例中,通过在上滑轨盖板511上设置气孔,可以在上滑轨盖板511与第二滑块53之间形成气浮结构。该气浮结构不仅能够保证第二滑块53的稳定性,还可以通过向下的气压力来缓减刀具向下偏转的趋势,减缓低头效应,进而提高加工精度。
111.作为本发明的另一个可能的实施例,如图10所示,加工平台包括:放置台面21,与气浮主轴机构3及第一刀具移动机构4均固定连接。
112.优选的,该放置台面21的材质为大理石。大理石的重量较轻,加工性较好。同时,其热稳定性更好,受温度影响变形小。由此,可以进一步保证放置台面21具有更高的精度。
113.平台支架23,平台支架23与放置台面21之间通过多个气动隔震器22进行连接。
114.具体的,气动隔震器22也即空气弹簧,可以更好的隔离过滤外界的震动。以减少外部因素对加工平台稳定性的影响。
115.本实施中,优选的共设置有个气动隔震器22。其中位于同一直线上的气动隔震器22由同一个调节开关控制。另外,两个分别由两个单独的调节开关进行单独控制。调节开关用于调整气动隔震器22的高度。本结构的设置可以更加便于对放置台面21水平度的调整。
116.供气装置,固定连接于平台支架23内部。供气装置可以为一个储气瓶,其中存放气体,当工厂因意外断电或断气时,该供气装置对本设备进行应急供气。以保证在突发情况下,可以有一个缓冲期来正常进行停机操作,进而可以减少设备的损坏。
117.另外,如图11所示,还包括防护外罩1,固定连接在平台支架23上,用于对旋转加工机构进行包覆防护,同时在防护外罩1上还安装有观察窗,用于查看内部情况。观察窗可用透明亚克力板制成。
118.作为本发明的一个可能的实施例,气浮主轴机构3、第一刀具移动机构4及第二刀具移动机构5中的运动部件与固定部件之间均设置有传感器,传感器用于检测运动部件与固定部件之间的位置信息及速度信息。
119.具体的,在气浮主轴机构3中,在电机的动子和定子之间设置有编码器,以检测速度及位置。
120.在第一刀具移动机构4及第二刀具移动机构5中,均是在对应的滑块及滑轨之间设置有光栅传感器6,以检测速度及位置。
121.通过设置传感器,可以为整个系统的反馈调节,提供数据支撑,以进一步提高该加工系统的精度。
122.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。