一种油菜自动移苗机及其自动移苗方法
- 国知局
- 2024-07-12 12:55:15
本发明涉及农业机械,尤其涉及一种油菜自动移苗机及其自动移苗方法。
背景技术:
1、油菜的种植方式主要涵盖人工育苗移栽、毯状苗机械移栽、人工撒播和机械直播四种。其中,撒播和直播是主要的播种方式,撒播方便,便于操作,直播可以使得植株的排列有序,便于后续的农田管理和监测,但撒播或直播后的油菜常会出现油菜苗密度不均匀的情况,如不及时移苗,从而会因环境不良削弱幼苗长势,影响作物产量。国内外目前主要采用人工移苗,操作员主观判断密度不均区域,把密集区域的幼苗移动至稀疏区域,但是效率低下,精度不高。因此,有必要研究一种油菜自动移苗机,结合计算机视觉技术,以保证精确移苗,提高幼苗密度均匀性,提高作物产量。
技术实现思路
1、本发明的目的在于提出一种油菜自动移苗机及其自动移苗方法以解决背景技术中所提出的问题:
2、现有人工移苗的方式对于密度不均区域的判断具有较强的主观性,不仅效率低下,其精度也不高。
3、为了实现上述目的,本发明采用了如下技术方案:
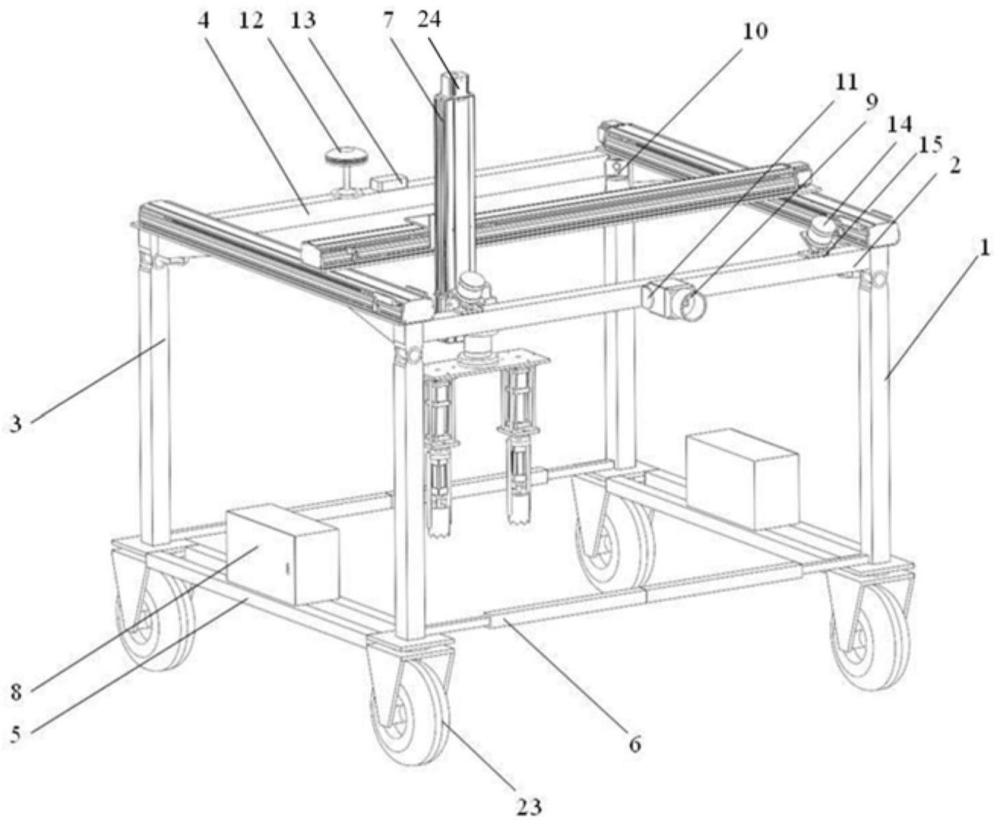
4、一种油菜自动移苗机,包括:车架、幼苗数据采集处理装置、定位装置、移苗装置、动力装置和控制装置;所述车架上方设置有所述幼苗数据采集处理装置和所述定位装置,所述车架内部设置有所述移苗装置和所述控制装置,所述车架下方通过所述动力装置的轮毂电机驱动移苗机在油菜田间行走。
5、优选地,所述车架包括两个前支撑柱、前部梁、两个后支撑柱、后部梁、置物架、两个双头电推杆和同步带直线模组,所述两个前支撑柱和所述两个后支撑柱对称设置在车架四角,所述前部梁铰接在两个前支撑柱上方,所述后部梁铰接在两个后支撑柱上方,所述置物架横向设置在相邻的前支撑柱和后支撑柱中间,所述两个双头电推杆通过两端的伸出端分别连接两个前支撑柱内侧和两个后支撑柱内侧,所述同步带直线模组设置于所述前部梁和后部梁的上方,所述同步带直线模组一端设置有伺服电机,所述伺服电机用于驱动同步带直线模组在轨道上滑动。
6、优选地,所述幼苗数据采集处理装置包括工业相机和红外摄像头,所述工业相机通过可调相机支架设置于前部梁的前板中心处,所述工业相机通过可调相机支架调节的拍摄角度刚好覆盖前方整垄的范围,所述工业相机内部还设置有传感器,用于记录工业相机的转动角度;所述红外摄像头设置于车架顶端内侧四角处,用于对油菜幼苗进行二次识别与定位。
7、优选地,所述定位装置包括高精度测量型天线、北斗定位模块和激光雷达;所述高精度测量型天线设置在后部梁上方,用于接收当前机器的定位信息,所述北斗定位模块设置在后部梁的上方中心处,用于接收北斗卫星的信号,确定移苗机所在位置,并传送至控制装置,根据北斗卫星的信号进行路径规划;所述激光雷达通过可调节支架对称设置在前部梁两端。
8、优选地,所述移苗装置包括移苗机构;所述移苗机构包括旋转机构、液压缸、末端执行器1号、末端执行器2号和钢板;所述旋转机构设置于移苗机构最上方;所述液压缸分别设置于钢板与末端执行器1号、末端执行器2号的中间以及末端执行器1号和末端执行器2号上;所述钢板设置于旋转机构下方;所述末端执行器1号上的液压缸下方连接有半圆空心件,所述末端执行器2号上的液压缸下方连接有圆盘。
9、优选地,所述控制装置包括控制箱,所述控制箱安装在置物架上,所述控制箱内部设置有jetson nano控制器、传感器、信号收发器和直流电机电源;所述jetson nano控制器与传感器、双头电推杆、同步带直线模组、工业相机及其可调相机支架、红外摄像头、北斗定位模块、激光雷达及其可调节支架、旋转机构、液压缸、末端执行器1号、末端执行器2号、轮毂电机和伺服电机相连接;所述传感器用于接收位置信息并将位置信息传输给jetsonnano控制器;所述信号收发器用于接收和发送电信号;所述直流电机电源用于为移苗车供电。
10、一种油菜自动移苗机的自动移苗方法,包括如下步骤:
11、s1:幼苗数据采集处理装置基于改进yolov7的轻量化模型进行油菜幼苗的实时识别,还通过红外摄像头对油菜幼苗进行二次识别和定位,以此采集获取不同生长时期的油菜图片;
12、s2:控制装置接收并识别油菜幼苗数据采集处理装置采集的油菜幼苗信息,利用改进的yolov7模型识别油菜幼苗,分别判断密集区域和稀疏区域,以此选取间苗执行点和补苗执行点,同时基于定位装置输出间苗执行点和补苗执行点对应的坐标位置及移苗机位置;
13、s3:控制装置接收定位装置输出的位置信息并进行路径规划,再通过动力装置驱动移苗机根据规划路径进行移动,同时通过激光雷达扫描垄沟中心线,遇垄宽不一致时控制双头电推杆自动调整以调节轮距;
14、s4:当到达间苗执行点或补苗执行点时,通过移苗装置进行相应的移苗工作。
15、优选地,所述s1和所述s2中改进yolov7的轻量化模型的改进步骤具体如下:
16、选用轻量级网络shufflenetv2替换原始yolov7模型中的主干网络,增加小目标检测头dyhead,引入坐标注意力机制ca和使用eiou损失函数替换yolov7模型中原有的损失函数得到改进yolov7的轻量化模型;
17、所述s2具体如下:利用改进yolov7的轻量化模型识别幼苗,基于均匀度判断密集区域:
18、
19、
20、
21、其中,u表示均匀度;σ表示标准差;μ表示平均值;x1,x2,…,xn表示n个小格每格内的油菜幼苗植株数;
22、将采集到的图片均分为n个小格,根据均匀度u的值判断图片是否存在密集区域或稀疏区域;若存在,则将每个小格再次均分为n个小格,根据此时均匀度u的值判断图片中n个小格的每个小格是否存在密集区域或稀疏区域,若存在,则输出该小格上检测框中心点坐标;
23、所述工业相机还进行摄像头标定,当油菜的叶片展开到3~5cm时,计算小格内每株油菜幼苗与以每株油菜幼苗预测框的中心点坐标为圆心20cm为半径圆的范围内的其他油菜幼苗预测框中心点的距离d,计算距离d前工业相机还进行摄像头标定,距离d的计算具体如下:
24、
25、
26、其中,xc表示油菜幼苗预测框中心点的横坐标;yc表示油菜幼苗预测框中心点的纵坐标;xl、xr、yl、yr分别表示油菜幼苗预测框的左上角像素横坐标、右下角像素横坐标、左上角像素横坐标和右下角像素横坐标;
27、
28、其中,xc1、yc1、xc2、yc2分别表示油菜幼苗与范围内其他油菜幼苗预测框中心点的坐标;
29、输出距离d,当存在3个d<5cm时,则定义此油菜幼苗位置点为间苗执行点;当15cm<d<20cm,取两个点的中心点作为补苗执行点;输出间苗执行点和补苗执行点位置信息至jetson nano控制器。
30、优选地,所述s3中,当移苗机根据所规划的路线行驶遇垄宽不一致时,用激光雷达扫描前方垄沟,确定前方垄沟中心线,并将前方垄沟中心线位置信息传输回控制装置,控制移苗机前后两个双头电推杆同时向两侧伸长,调节轮距,当到达前方垄沟中心线位置处双头电推杆停止伸长,前支撑柱和后支撑柱随双头电推杆向外侧摆动,保证移苗机的平衡。
31、优选地,所述s4中的移苗工作的具体步骤如下:
32、jetson nano控制器读取输出的补苗执行点位置信息,控制同步带直线模组工作,其中,伺服电机带动同步带直线模组运动,通过和旋转机构配合将末端执行器2号定位到执行点,竖直的同步带直线模组下降到一定位置,液压缸工作使末端执行器2号进入土中,入土过程中旋转机构同时旋转,完全入土后停留3s,旋转机构旋转,液压缸工作使末端执行器2号出土,采集得到补苗执行点的土壤;
33、jetson nano控制器读取输出的间苗执行点位置信息,把位置信息传输给同步带直线模组,同步带直线模组通过和旋转机构配合使末端执行器1号定位到执行点,液压缸工作使末端执行器1号进入土中,入土过程中旋转机构同时旋转,完全入土后停留3s,旋转机构旋转,液压缸工作使末端执行器1号出土,采集得到间苗执行点的幼苗植株;
34、jetson nano控制器再次读取输出的补苗执行点位置信息,把位置信息传输给同步带直线模组,同步带直线模组通过和旋转机构配合使末端执行器1号定位到执行点,液压缸工作使末端执行器1号进入土中,入土过程中旋转机构同时旋转,完全入土后停留3s,旋转机构旋转,液压缸工作使末端执行器1号出土的同时末端执行器1号上的液压缸工作,所连接的半圆空心件往下工作,使植株和土壤留在洞中;
35、jetson nano控制器再次读取放间苗执行点位置信息,把位置信息传输给同步带直线模组,同步带直线模组通过和旋转机构配合使末端执行器2号定位到执行点,液压缸工作使末端执行器2号进入土中,入土过程中旋转机构同时旋转,完全入土后停留3s,旋转机构旋转,液压缸工作使末端执行器2号出土的同时末端执行器2号上的液压缸工作,所连接的圆盘向下移动,压实土壤。
36、与现有技术相比,本发明提供了一种油菜自动移苗机及其自动移苗方法,具备以下有益效果:
37、1、本发明中的双头电推杆可以适应不同垄宽下的田间作业,激光雷达扫描垄沟中心线,把中心线位置信息传输回处理器,根据垄宽自行做出调整;
38、2、本发明中的幼苗数据采集处理装置基于改进yolov7对幼苗进行识别,有效提升了识别精度,并且选用轻量级网络shufflenetv2,减少了内存占用量,提高实时传输速度。并且有红外摄像头对幼苗进行二次识别,提高识别准确性,防止遗漏幼苗;
39、3、本发明中的定位装置使用北斗定位和激光雷达,可以精确掌握本发明的运动位置,在精确的位置上对幼苗完成移苗作业;
40、4、本发明中的移苗装置通过两组执行装置配合完成移苗作业,提高工作效率和移苗成功率;
41、5、本发明中预设了密度标准和执行点标准,可以根据所预设标准进行判断,从而实现移苗作业;
42、6、本发明设计合理,在不需要人工参与的情况下,能够精准识别幼苗,并精准定位到执行点,自动完成移苗操作,减少劳动力,大大提高作业精度和作业效率。
本文地址:https://www.jishuxx.com/zhuanli/20240614/101708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表