一种基于腹部挤压方式的鱼卵获取装置及方法
- 国知局
- 2024-07-12 13:14:41
本发明涉及渔业生产繁殖,具体涉及一种基于腹部挤压方式的鱼卵获取装置及方法。
背景技术:
1、鱼类人工受精是在不同领域一种重要的手段加速鱼类繁殖。在目前还有有使用激素,自然培育等方式使鱼类繁殖,相比环境污染更大,时间成本需求更多。
2、现有发明专利大多是采用自然培育方式收集鱼卵进行培育存在的问题是比较耗时。本发明采用腹部挤压方式获取鱼卵,解决上述问题。
技术实现思路
1、本发明的目的在于针对现有技术存在的缺陷,提供一种基于腹部挤压方式的鱼卵获取装置及方法,以解决现有技术对于鱼卵收集比较费时的问题,以提高鱼卵获取的效率。
2、本发明的第一方面,提供一种基于腹部挤压方式的鱼卵获取装置,包括顶板,还包括水平移动运输机构、抓取机构、挤压机构和收集机构,所述抓取机构和所述挤压机构连接在所述水平移动运输机构下方,以分别用于用于抓取鱼身和挤压鱼腹,所述收集机构连接在所述挤压的外侧,以用于收集鱼卵;
3、所述水平移动运输机构安装于所述顶板下方,所述水平运输机构包括丝杆导轨、第一滑台、滑动支撑台和凹字钢,其中所述丝杆导轨安装于所述顶板中间,所述凹字钢共有两条,分别安装于所述顶板两侧,位于所述丝杆滑轨两侧,所述滑动支撑台包括第二滑台以及滚轮,所述滚轮安装于所述第二滑台下端,所述第二滑台上端安装于第一滑台下方,所述滚轮位于所述凹字钢内侧面上滚动。
4、优选的,所述抓取机构包括连接台、柔性机械夹手和负压吸附装置,其中连接台安装于所述第二滑台下端,所述连接台下端安装有柔性机械手;
5、所述柔性机械手包括气缸、连接钢板、柔性橡胶仿生手,所述气缸固定安装于所述连接台,所述连接钢板一端铰接于所述气缸,一端固定于所述连接台上,所述连接钢板下端安装有所述柔性橡胶仿生机械手,所述柔性机械手的附着面包括有所述负压吸附装置,用于加强抓取能力。
6、优选的,所述挤压机构包括第一舵机和挤压臂,所述第一舵机固定于所述收集机构内部,所述挤压臂和所述第一舵机连接。
7、优选的,所述收集机构包括机械臂、收集仓、输水泵、出水泵和过滤筛选网,所述机械臂包括第一连接杆、第二连接杆、第二舵机、第三舵机,所述第一连接杆固定于所述第二滑台下方,所述第二舵机安装于所述第一连接杆另一端,所述第二舵机轴承固定于所述第二连接杆一端,所述第三舵机安装于所述第二连接杆的另一端,并且所述第三舵机轴承固定铰接于所述收集仓上;所述收集仓侧面安装设置有所述输水泵,所述收集仓底部安装设置有所述出水泵;所述过滤筛网安装设置于所述输水泵上方,固定于所述收集仓内部侧面。
8、优选的,所述水平运输机构的所述第一滑台及所述滑动支撑台共安装有两个,分别运输托起所述抓取机构及所述收集机构。
9、优选的,所述负压吸附装置为负压吸盘。
10、本发明的第二方面,提供一种基于腹部挤压方式的鱼卵获取方法,采用权利要求上述任意一项所述的一种基于腹部挤压方式的鱼卵获取装置,包括如下步骤:
11、s1:鱼类被固定后,所述抓取机构的气缸收缩带动柔性仿生爪抓取鱼类两侧;
12、s2:收集仓内第一舵机控制挤压臂张开;
13、s3:第一滑台移动,待鱼类身体进入挤压臂内部,停止移动;第一舵机控制挤压臂旋转挤压,第一滑台开始移动,挤压臂顺着鱼腹部移动,挤压鱼卵进入收集仓;
14、s4:鱼卵收集工作完成后,控制收集仓位于水平角度,输水泵开启,待鱼卵浸没后关闭阀门;待鱼卵浸泡清洗后,出水泵开启排除污水;
15、s5:鱼卵收集完成。
16、相比于现有技术,本发明具有如下有益效果:
17、本发明能够快速准确的完成鱼卵的收集,同时不对鱼类造成致命损伤,获取鱼卵后,可快速将鱼类放生到水体中,不仅获得效率较高,同时对鱼类较为友好。
18、本发明利用特殊的结构设计,在抓取鱼身时,能够克服鱼身粘滑的特性,保证抓取的可靠性,从而尽可能缩短鱼卵获取过程所需的时间,这样可在短时间内获取鱼卵后将鱼放生,避免对鱼类造成致命伤害。
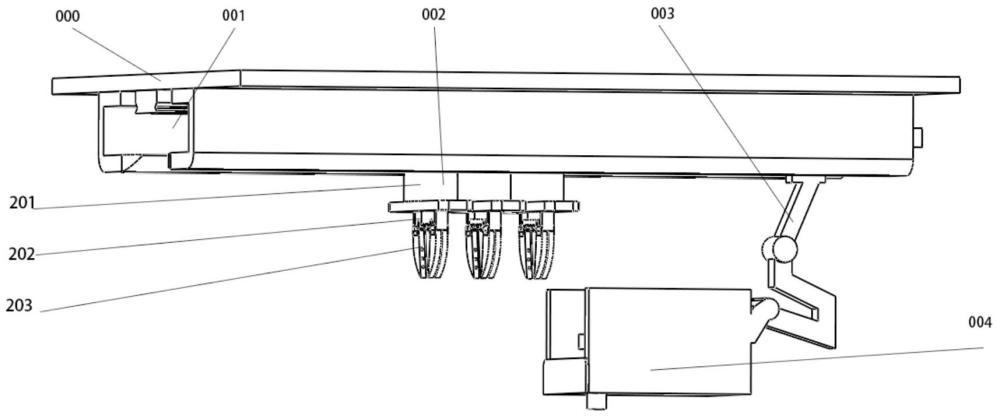
技术特征:1.一种基于腹部挤压方式的鱼卵获取装置,包括顶板(000),其特征在于:还包括水平移动运输机构(001)、抓取机构(002)、挤压机构(003)和收集机构(004),所述抓取机构(002)和所述挤压机构(003)连接在所述水平移动运输机构(001)下方,以分别用于用于抓取鱼身和挤压鱼腹,所述收集机构(004)连接在所述挤压(003)的外侧,以用于收集鱼卵;
2.据权利要求1所述的一种基于腹部挤压方式的鱼卵获取装置,其特征在于:所述抓取机构(002)包括连接台(201)、柔性机械夹手(202)和负压吸附装置(203),其中连接台(201)安装于所述第二滑台(105)下端,所述连接台(105)下端安装有柔性机械手(202);
3.据权利要求1所述的一种基于腹部挤压方式的鱼卵获取装置,其特征在于:所述挤压机构(003)包括第一舵机(301)和挤压臂(302),所述第一舵机(301)固定于所述收集机构(004)内部,所述挤压臂(302)和所述第一舵机(301)连接。
4.据权利要求1所述的一种基于腹部挤压方式的鱼卵获取装置,其特征在于:所述收集机构(004)包括机械臂(401)、收集仓(402)、输水泵(403)、出水泵(404)和过滤筛选网(405),所述机械臂(401)包括第一连接杆(501)、第二连接杆(502)、第二舵机(503)、第三舵机(504),所述第一连接杆(501)固定于所述第二滑台(105)下方,所述第二舵机(503)安装于所述第一连接杆(501)另一端,所述第二舵机(503)轴承固定于所述第二连接杆(502)一端,所述第三舵机(504)安装于所述第二连接杆(502)的另一端,并且所述第三舵机(504)轴承固定铰接于所述收集仓(402)上;所述收集仓(402)侧面安装设置有所述输水泵(403),所述收集仓(402)底部安装设置有所述出水泵(404);所述过滤筛网(405)安装设置于所述输水泵(404)上方,固定于所述收集仓(402)内部侧面。
5.据权利要求1所述的一种基于腹部挤压方式的鱼卵获取装置,其特征在于:所述水平运输机构(001)的所述第一滑台(102)及所述滑动支撑台(103)共安装有两个,分别运输托起所述抓取机构(002)及所述收集机构(004)。
6.据权利要求2所述的一种基于腹部挤压方式的鱼卵获取装置,其特征在于:所述负压吸附装置(203)为负压吸盘。
7.一种基于腹部挤压方式的鱼卵获取方法,其特征在于,采用权利要求1-6任意一项所述的一种基于腹部挤压方式的鱼卵获取装置,包括如下步骤:
技术总结本发明提出了一种基于腹部挤压方式的鱼卵获取装置及方法,该装置包括顶板,还包括水平移动运输机构、抓取机构、挤压机构和收集机构,所述抓取机构和所述挤压机构连接在所述水平移动运输机构下方,以分别用于用于抓取鱼身和挤压鱼腹,所述收集机构连接在所述挤压的外侧,以用于收集鱼卵。本发明能够快速准确的完成鱼卵的收集,同时不对鱼类造成致命损伤,获取鱼卵后,可快速将鱼类放生到水体中,不仅获得效率较高,同时对鱼类较为友好,同时本发明利用特殊的结构设计,在抓取鱼身时,能够克服鱼身粘滑的特性,保证抓取的可靠性,从而尽可能缩短鱼卵获取过程所需的时间,这样可在短时间内获取鱼卵后将鱼放生,避免对鱼类造成致命伤害。技术研发人员:刘明受保护的技术使用者:三峡大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240614/103840.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表