一种鞋面自动划线方法及装置与流程
- 国知局
- 2024-07-12 11:24:09
本发明属于制鞋领域,具体涉及一种鞋面自动划线方法及装置。
背景技术:
1、传统的制鞋产线成型工艺主要由前段、中段及后段组成,更具体地,前段工序包括依次的鞋头定型、人工放楦、人工拉邦、人工蒸湿套楦、人工系鞋带、人工打后帮、人工划线、品检和热定型。现有技术中该工序是由人工将鞋子放入指定划线机的鞋底模具上,再通过无痕笔沿着鞋底的轨迹描绘出来,划线的目的是借助紫光灯指导人工沿着划线的轮廓进行刷胶。但这种方式需要耗费更多的人工成本,且划线质量依赖于人工技术,划线质量的好坏又影响到后续的刷胶工序,进而影响到所制鞋品的质量。
技术实现思路
1、本发明的目的是提出一种鞋面自动划线方法及装置,由机器替代人工划线,人工成本更低,效率更高,划线更准确。
2、本发明通过以下技术方案实现:
3、一种鞋面自动划线方法,包括如下步骤:
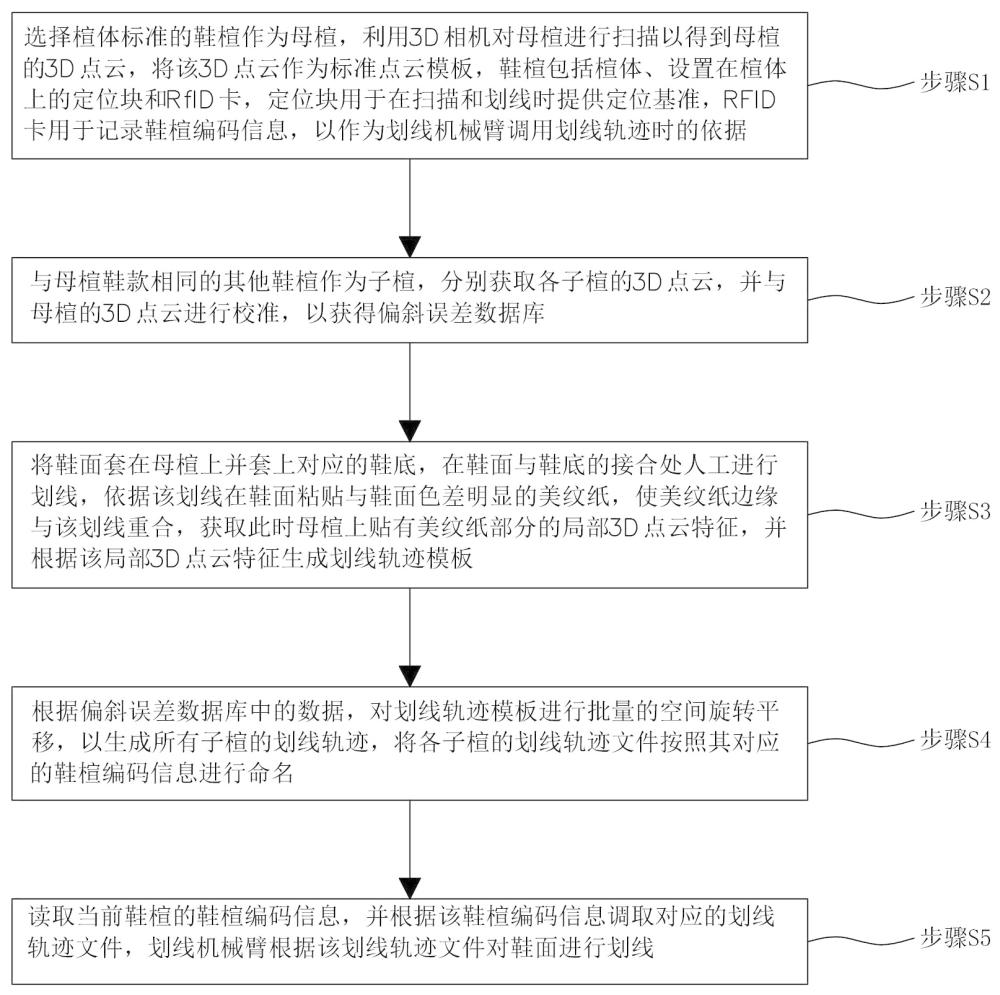
4、步骤s1、选择楦头标准的鞋楦作为母楦,利用3d相机对母楦进行扫描以得到母楦的3d点云,将该3d点云作为标准点云模板,鞋楦包括楦头、设置在楦头上的定位块和rfid卡,定位块用于在扫描和划线时提供定位基准,rfid卡用于记录鞋楦编码信息,以作为划线机械臂调用划线轨迹时的依据,标准鞋楦指定位块标准地设置在标准楦头上的鞋楦;
5、步骤s2、与母楦鞋款相同的其他鞋楦作为子楦,分别获取各子楦的3d点云,并分别计算各子楦的3d点云与母线的3d点云的偏差,以获得偏斜误差数据库;
6、步骤s3、将鞋面套在母楦上并套上对应的鞋底,在鞋面与鞋底的接合处人工进行划线,依据该划线在鞋面粘贴与鞋面色差明显的美纹纸,使美纹纸边缘与该划线重合,获取此时母楦上贴有美纹纸部分的局部3d点云特征,并根据该局部3d点云特征生成划线轨迹模板;
7、步骤s4、根据偏斜误差数据库中的数据,对划线轨迹模板进行批量的旋转平移,以生成所有子楦的划线轨迹文件,将各子楦的划线轨迹文件按照其对应的鞋楦编码信息进行命名;
8、步骤s5、读取当前鞋楦的鞋楦编码信息,并根据该鞋楦编码信息调取对应的划线轨迹文件,划线机械臂根据该划线轨迹文件对鞋面进行划线。
9、进一步的,所述步骤s2中,在母楦的3d点云设置m个空间坐标点(x1,y1,z1)、(x2,y2,z2)、…、(xm,ym,zm),将这m个空间坐标点作为母楦标准坐标点,对于各子楦的3d点云也设置相同位置的m个空间坐标点,对于第n个子楦,则得到m个空间坐标点(x1.n,y1.n,z1.n)、(x2.n,y2.n,z2.n)、…、(xm.n,ym.n,zm.n),分别计算该子楦的空间坐标点与标准坐标点之间的差值,即得到该子楦的偏斜误差数据,对于第n个子楦,其偏斜误差数据为(x1-x1.n,y1-y1.n,z1-z1.n)、(x2-x2.n,y2-y2.n,z2-z2.n)、…、(xm-xm.n,ym-ym.n,zm-zm.n),所述偏斜误差数据库用于存储所有子楦的偏斜误差数据,其中,n为整数。
10、进一步的,在所述母楦的3d点云设置四个空间坐标点,这四个空间坐标点分别对应于母楦的鞋头、鞋腰两侧和鞋后跟。
11、进一步的,所述步骤s1中,所述鞋楦编码信息包括依次排列的楦头款式、码数、左右脚信息、流水号,所述步骤s2中,所述与母楦鞋款相同指楦头款式、码数和左右脚信息均与母楦相同。
12、进一步的,所述步骤s4中,根据偏斜误差数据库中各数据存入的先后顺序,依次对划线轨迹模板进行对应于各子楦的偏斜误差数据的补偿,从而完成对划线轨迹模板进行批量的旋转平移。
13、进一步的,所述步骤s1中,所述定位块设置在楦头端部,定位块两侧面具有卡槽,定位块下端具有定位槽,定位块一端部具有安装槽,所述rfid卡设置在安装槽内。
14、进一步的,在离线视觉站对母楦和子楦进行扫描以得到母楦的3d点云和子楦的3d点云,离线视觉站包括扫描机械臂、设置在扫描机械臂上的3d相机、第一夹具和设置在夹具上以读取rfid卡的第一读写器,第一夹具具有与定位块卡槽匹配的夹爪和与定位槽匹配的定位柱。
15、进一步的,还包括步骤s6、对划线完成后的鞋楦进行扫描并判断划线是否完整。
16、进一步的,所述步骤s5和步骤s6由划线站进行,划线站包括划线机械臂、设置在划线机械臂上的划线机构、输送模组、滑动设置在输送模组上的第二夹具、设置在输送模组上以读取rfid卡的第二读写器、由输送模组穿过的平面视觉部,第二夹具夹持所述鞋楦,鞋楦经由第二读写器读取鞋楦编码信息后由输送模块输送至划线机械臂处,划线机械臂根据鞋楦编码信息调取对应的划线轨迹文件并带动划线机构进行划线,划线完成后,鞋楦经输送模块输送至平面视觉部进行扫描,以判断划线是否完整。
17、本发明还通过以下技术方案实现:
18、一种鞋面自动划线装置,包括离线视觉站和划线站;
19、离线视觉站用于选择标准鞋楦作为母楦,利用3d相机对母楦进行扫描以得到母楦的3d点云,将该3d点云作为标准点云模板;用于将与母楦鞋款相同的其他鞋楦作为子楦,分别获取各子楦的3d点云,并与母楦的3d点云进行校准,以获得偏斜误差数据库,其中鞋楦包括楦头、设置在楦头上的定位块和rfid卡,定位块用于在扫描和划线时提供定位基准,rfid卡用于记录鞋楦编码信息,以作为划线机械臂调用划线轨迹时的依据;用于对已套有鞋面和对应鞋底且在鞋面与鞋底的接合处划线并依据该划线粘贴了与鞋面色差明显的美纹纸的母楦进行扫描,以获取母楦上贴有美纹纸部分的局部3d点云特征,并依次生成划线轨迹模板;用于根据偏斜误差数据库中的数据,对划线轨迹模板进行批量的旋转平移,以生成所有子楦的划线轨迹,将各子楦的划线轨迹文件按照其对应的鞋楦编码信息进行命名;
20、划线站用于读取当前鞋楦的鞋楦编码信息,并根据该鞋楦编码信息调取对应的划线轨迹文件,划线机械臂根据该划线轨迹文件对鞋面进行划线。
21、本发明具有如下有益效果:
22、1、本发明首先选择标准鞋楦作为母楦并将母楦的3d点云作为标准点云模板,然后分别获取每一个子楦的3d点云,并计算各子楦的3d点云与母线的3d点云的偏差,从而得到偏斜误差数据库,接着将鞋面套在母楦上并套上对应的鞋底,在鞋面与鞋底的接合处人工进行划线,依据该划线在鞋面粘贴与鞋面色差明显的美纹纸,并获取此时母楦上贴有美纹纸部分的局部3d点云特征,根据该局部3d点云特征生成划线轨迹模板,接着根据偏斜误差数据库中的数据,对划线轨迹模板进行批量的旋转平移,从而得到所有子楦的划线轨迹文件,各子楦的划线轨迹文件则按照其对应的鞋楦编码信息进行命名,使划线机械臂能够根据鞋楦编码信息调取对应的划线轨迹文件,从而根据该划线轨迹文件对鞋面进行划线,如此实现由机器代替人工进行划线工序,大大降低人工成本,且划线效率更高,划线也更准确,划线质量更好。
技术特征:1.一种鞋面自动划线方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种鞋面自动划线方法,其特征在于:所述步骤s2中,在母楦的3d点云设置m个空间坐标点(x1,y1,z1)、(x2,y2,z2)、…、(xm,ym,zm),将这m个空间坐标点作为母楦标准坐标点,对于各子楦的3d点云也设置相同位置的m个空间坐标点,对于第n个子楦,则得到m个空间坐标点(x1.n,y1.n,z1.n)、(x2.n,y2.n,z2.n)、…、(xm.n,ym.n,zm.n),分别计算该子楦的空间坐标点与标准坐标点之间的差值,即得到该子楦的偏斜误差数据,对于第n个子楦,其偏斜误差数据为(x1-x1.n,y1-y1.n,z1-z1.n)、(x2-x2.n,y2-y2.n,z2-z2.n)、…、(xm-xm.n,ym-ym.n,zm-zm.n),所述偏斜误差数据库用于存储所有子楦的偏斜误差数据,其中,n为整数。
3.根据权利要求2所述的一种鞋面自动划线方法,其特征在于:在所述母楦的3d点云设置四个空间坐标点,这四个空间坐标点分别对应于母楦的鞋头、鞋腰两侧和鞋后跟。
4.根据权利要求1或2或3所述的一种鞋面自动划线方法,其特征在于:所述步骤s1中,所述鞋楦编码信息包括依次排列的楦头款式、码数、左右脚信息、流水号,所述步骤s2中,所述与母楦鞋款相同指楦头款式、码数和左右脚信息均与母楦相同。
5.根据权利要求2或3所述的一种鞋面自动划线方法,其特征在于:所述步骤s4中,根据偏斜误差数据库中各数据存入的先后顺序,依次对划线轨迹模板进行对应于各子楦的偏斜误差数据的补偿,从而完成对划线轨迹模板进行批量的旋转平移。
6.根据权利要求1或2或3所述的一种鞋面自动划线方法,其特征在于:所述步骤s1中,所述定位块设置在楦头端部,定位块两侧面具有卡槽,定位块下端具有定位槽,定位块一端部具有安装槽,所述rfid卡设置在安装槽内。
7.根据权利要求5所述的一种鞋面自动划线方法,其特征在于:在离线视觉站对母楦和子楦进行扫描以得到母楦的3d点云和子楦的3d点云,离线视觉站包括扫描机械臂、设置在扫描机械臂上的3d相机、第一夹具和设置在夹具上以读取rfid卡的第一读写器,第一夹具具有与定位块卡槽匹配的夹爪和与定位槽匹配的定位柱。
8.根据权利要求1或2或3所述的一种鞋面自动划线方法,其特征在于:还包括步骤s6、对划线完成后的鞋楦进行扫描并判断划线是否完整。
9.根据权利要求8所述的一种鞋面自动划线方法,其特征在于:所述步骤s5和步骤s6由划线站进行,划线站包括划线机械臂、设置在划线机械臂上的划线机构、输送模组、滑动设置在输送模组上的第二夹具、设置在输送模组上以读取rfid卡的第二读写器、由输送模组穿过的平面视觉部,第二夹具夹持所述鞋楦,鞋楦经由第二读写器读取鞋楦编码信息后由输送模块输送至划线机械臂处,划线机械臂根据鞋楦编码信息调取对应的划线轨迹文件并带动划线机构进行划线,划线完成后,鞋楦经输送模块输送至平面视觉部进行扫描,以判断划线是否完整。
10.一种鞋面自动划线装置,其特征在于:包括离线视觉站和划线站;
技术总结本发明提供一种鞋面自动划线方法及装置,属于制鞋领域,包括:步骤S1、选择标准鞋楦作为母楦,利用3D相机对母楦进行扫描以得到母楦的3D点云,将该3D点云作为标准点云模板;步骤S2、分别获取各子楦的3D点云,以获得偏斜误差数据库;步骤S3、获取母楦上贴有美纹纸部分的局部3D点云特征,并根据该局部3D点云特征生成划线轨迹模板;步骤S4、根据偏斜误差数据库,对划线轨迹模板进行批量的旋转平移,以生成所有子楦的划线轨迹,将各子楦的划线轨迹文件按照其对应的鞋楦编码信息进行命名;步骤S5、调取对应的划线轨迹文件,划线机械臂根据该划线轨迹文件对鞋面进行划线。本发明实现由机器替代人工划线,人工成本更低,效率更高,划线更准确。技术研发人员:张明全,李文亮,许烈,郑冰,何钊滨,陈志旺,吴梓鸿,黄煌清,梁炳灿受保护的技术使用者:泉州华数机器人有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/92630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表