拖把系统和拖把系统的用途的制作方法
- 国知局
- 2024-07-10 17:15:34
本发明涉及拖把系统。根据本发明,提供了拖把系统的用途,用于清洁特别是地板、墙壁和/或天花板,优选地在无菌洁净室中。
背景技术:
1、拖把系统用于清洁洁净室中的地板或其它表面。在洁净室工作伴随着特别的卫生要求。这涉及可用于洁净室中的物体和工作过程。最重要的是防止诸如颗粒和/或细菌的污染物被引入到洁净室中以及可能由其它物体的污染物交叉污染清洁物体。
2、对于被引入到洁净室中的拖把系统和其它工作装置,其通常适用的是这些必须是可净化的和可消毒的,可选地甚至可灭菌的,例如,通过在121℃下高压灭菌长达25分钟或在134℃下高压灭菌长达6分钟。拖把系统还必须耐清洁剂、消毒剂和/或溶剂。消毒剂包括例如二胺、异丙醇、乙醇、活性氯、过氧化氢。清洁剂包括例如诸如氢氧化钠的碱性清洁剂和/或酸性清洁剂。溶剂是例如丙酮。
3、当清洁洁净室时,特别重要的是使所有必要的工作步骤尽可能地可再现。另外,已经发现,当在洁净室中工作时,单独的手动工作步骤的数量应该保持尽可能低。由于由清洁人员以及也由每次移动的设备将颗粒释放到洁净室中,因而在洁净室中少的单独的工作步骤是有利的。这种颗粒的释放应该尽可能地最小化。在这里,由清洁人员正确使用拖把系统是非常重要的。在传统的拖把系统中,清洁人员经常必须为各种工作步骤作出相当大的努力。经验已经表明,对清洁人员过度的身体压力迅速导致乏力和消极怠工。当清洁洁净室时,通常必须在每个清洁过程之后更换拖把套,即,经常需要大量的擦拭拖把套来洁净室。拖把套通常在15-20m2之后进行更换。由清洁人员手动接触拖把是不利的,因为可能发生交叉污染。在这种情况下,污染物可从所使用的拖把套转移至使用者,并且从使用者转移至洁净室中的新的拖把套或其它物体。这可能导致洁净室的不希望的污染。为了避免在使用拖把系统时交叉污染,在没有手动接触的情况下接收新的拖把套并且丢弃所使用的拖把套。另外,这避免了清洁人员在接收和/或丢弃拖把套时必须弯腰。
4、例如,在de 20 2013 011 946 u1中描述了一种用于洁净室的拖把系统的形式的清洁装置,该清洁装置包括柄部分区段、封闭元件和用于拖把套的保持器。在已知的清洁装置中,杠杆状封闭元件设置在用于拖把套的保持器的上侧上。保持器大体上是矩形的,并且具有大于其宽度范围的纵向范围。保持器包括可相对于彼此枢转的两个保持翼。为了清洁,封闭元件将保持翼保持在一个平面中,使得平坦拖把套可在要清洁的表面上平放在保持器的下侧上。平坦拖把套具有在纵向方向上彼此相对放置的口袋,用于在每种情况下容纳一个保持翼。如果封闭元件被释放,则保持翼在远离拖把把手的方向上向下折叠,使得保持翼滑出拖把套的口袋并释放拖把套。保持器上侧上的封闭元件可由清洁人员致动。de 202013 011 946 u1还描述了清洁车,音叉形释放装置紧固至该清洁车的框架。清洁装置可被引入到释放装置中,并被向上牵引,使得释放装置的音叉形臂按压抵靠封闭元件,并以这种方式释放封闭元件。这套清洁装置和清洁车非常适于人体工程学的洁净室清洁,并且因而非常流行。然而,需要一种清洁装置,其封闭元件在没有附加的释放装置的情况下在清洁车等上进行管理。因而,例如,需要一种系统,该系统在没有清洁车和没有释放装置的情况下进行管理,用于特别狭窄、小或密集占用的具有工作装置的洁净室。一些使用者已经摒弃了清洁车,并且将所使用的平坦拖把套弃置到接收器中用于以后取出,其中需要在没有诸如释放装置的闲置辅助装置的情况下进行管理。
5、ep 2 139 372 b1和ep 2 301 406 b1描述了具有拖把保持器的拖把系统,该拖把保持器由主要部分和夹持器组成。夹持器装备有大量倒钩状的、成角度的突起或者在拖把保持器的下侧上具有钩和孔眼的钩环连接件,以便与位于那里的平坦拖把布配合。夹持器可在拖把保持器的平面中的不同位置之间平移地来回移动,以便借助于突起或钩环连接件来夹持和夹住平坦拖把布,或者以便从夹持器释放平坦拖把布。夹持器可例如以常规方式通过拖把保持器上或上侧的杠杆来致动。另外,建议通过拖把把手相对于拖把保持器的旋转或借助于拖把把手上的可驱动缆绳的枢转杠杆来致动夹持器。然而,发现拖把把手本身的使用,如杠杆的使用,在许多实施方式中涉及无意的不正确操作的风险和相关的污染的风险。另外,在操作拖把系统期间,杠杆干扰人体工程学。它们在抓握期间阻碍清洁人员,并且例如在窄间隙的处理期间代表障碍。具有杠杆或拖把把手致动的实施方式难以仅用一只手操作。另外,枢转杠杆或可旋转拖把把手的使用在枢转或旋转轴承上产生附加的磨损,这在洁净室中是不希望的。根据一个替代方案,在拖把把手上设置电子按钮,该电子按钮致动拖把保持器上的电动机、螺线管或另一电池操作的电子致动器。电子致动器和开关关于在洁净室中使用拖把系统和为此所需的高压灭菌能力的适用性是非常成问题的。作为另一替代方案,ep 2 301 406 b1提出了使用安装在拖把把手中的杆,该杆具有用于致动夹持器的齿轮或蜗杆连接件。与传统的拖把系统相比,致动杆的使用伴随着显著增加的重量。拖把保持器在拖把把手上的安装复杂,并且例如用于单独运输、用于维护或用于清洁,拖把保持器可只能困难地从拖把把手分离。在ep 2 139 372 b1和ep 2301 406b1中描述的在拖把把手上具有致动的拖把系统都不适于与可伸缩的拖把把手一起使用。对于在洁净室中使用的要求仅不充分地满足ep 2 139 372 b1和ep 2 301 406 b1中描述的拖把系统。
6、wo 2013 166 492a2描述了另一种拖把系统,其具有多部件、部分可伸缩的拖把把手和拖把保持器,拖把保持器通过用于平坦拖把布的夹持器紧固至拖把把手。夹持器功能基本上类似于ep 2 139 372 b1和ep 2 301 406 b1中描述的那些夹持器功能。拖把把手由多部件第一夹持部分和可伸缩的第二夹持部分组成。第一夹持部分由拖把保持器侧下部分和上部分组成。第一夹持部分的上部分可伸缩地容纳第二夹持部分。在从第一夹持部分到第二夹持部分的过渡处,参照图6所描述的螺纹套筒布置在内侧上,该螺纹套筒与旋转杆上的右旋旋转螺纹配合,以便相对于彼此固定或释放夹持部分。在第二夹持部分的最上端部处,提供了端部夹持件,该端部夹持件可设计为可旋转的旋钮或具有按钮,该按钮可相对于把手的纵向方向横向地进行按压,并且利用该按钮可致动旋转杆。如参考图18所描述的,第一夹持部分由居中布置的夹持件分成上部分和下部分,上部分容纳第一夹持部分和旋转杆。第一夹持部分的下部分在内侧上接收拉杆,该拉杆紧固至夹持件的可平移移动部分,以便与后者一起升高。如图8和图9所示,在拖把把手和拖把保持器之间的连接件中,设置有缆绳,缆绳的缆绳保持器可紧固至拉杆。缆绳驱动夹持器。拖把保持器在拖把把手上的安装复杂,并且例如用于单独运输、用于维护或用于清洁,拖把保持器可只能困难地从拖把把手分离。当第一夹持部分与连接件分离时,缆绳保持器可被释放、脱落并且甚至损坏。所描述的拖把系统比传统的拖把系统重得多。部分伸缩性允许仅很小的程度的高度可调节性。因而,该拖把系统不太适合清洁洁净室中的墙壁和天花板表面。
技术实现思路
1、现在,本发明的一个目的是克服现有技术的缺点,并且特别是提供装置、部件和使用方法,该装置、部件和使用方法可特别容易地使用,特别是使用尽可能少的单独操纵动作,和/或由清洁人员施加尽可能小的力。
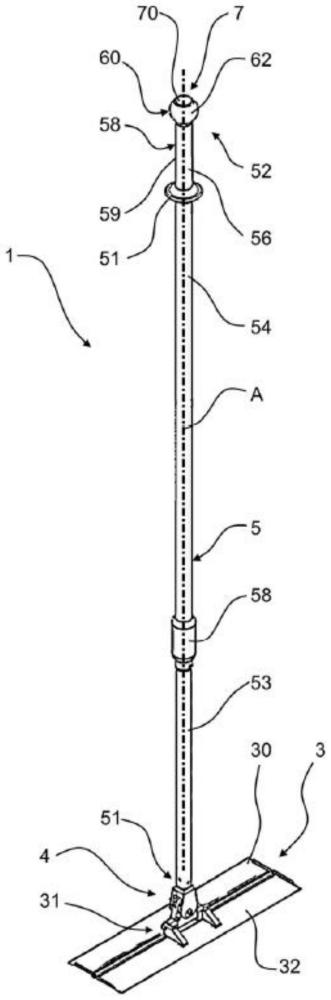
2、该目的由独立权利要求1和13的主题来实现。因而,提供了拖把系统,该拖把系统包括平坦拖把保持器,该拖把保持器适于并布置成在第一状态下保持拖把套,并且在第二状态下释放拖把套。该平坦拖把保持器还包括用于引起从第一状态到第二状态的改变的致动运动系统。拖把系统包括拖把把手,该拖把把手在第一端部处连接或可连接至平坦拖把保持器。与拖把把手上的第一端部相对,特别是在拖把把手的第二端部处,布置有致动构件,该致动构件适于并布置成激活致动运动系统。致动构件连接或可连接至致动运动系统。通过致动构件,可激活致动运动系统,该致动运动系统布置成并适于由于由致动构件的激活而使平坦拖把保持器从第一状态改变到第二状态。致动构件到致动运动系统的连接可为例如机械的、液压的、气动的、电子的或上述操作原理的组合。
3、例如,致动运动系统可包括阻挡构件,该阻挡构件在第一状态下固定平坦拖把保持器,并且该阻挡构件在第二状态下从固定释放平坦拖把保持器,使得平坦拖把保持器不再保持在第一状态下。在第二状态下,例如,拖把套的重力可使拖把套滑离平坦拖把保持器。可选地或附加地,在第二状态下,例如,弹簧或另一致动器可引起平坦拖把保持器的配置改变,使得拖把套可滑动或由平坦拖把保持器压迫。平坦拖把保持器可具有矩形的基本形状。平坦拖把保持器可具有在从35cm至55cm的范围内的长度,特别是在从40cm至50cm的范围内,并且具有在从8或10至20cm的范围内的宽度,特别是在从12cm至17cm的范围内。
4、根据本发明的一个方面,该方面可分别与其它方面或实施方式相结合,致动运动系统具有致动运动系统(31),该致动运动系统(31)具有至少一个第一拖把保持翼,该第一拖把保持翼可相对于至少一个第二拖把保持翼枢转,特别是沿着纵向边缘枢转。特别地,致动运动系统可具有至少两个拖把保持翼,该两个拖把保持翼可相对于彼此枢转,特别是沿着它们的纵向边缘枢转。第一拖把保持翼和/或第二拖把保持翼可刚性地紧固至拖把把手和/或铰接连接件。平坦拖把保持器优选地可具有两个保持翼,该两个保持翼可相对于彼此枢转。在第一状态下,平坦拖把保持器在平面中张紧平坦拖把套。在平坦拖把保持器的第一状态下,保持翼保持平坦和/或保持在平面中。在第二状态下,保持翼由于它们的重力和平坦拖把套的重力而可从平面向下折叠,使得例如平坦拖把套的在保持翼之上翻转的保持袋从保持翼向下滑动。
5、拖把把手可大致划分成三个区域,即,第一端部区域,靠近平坦拖把保持器,第一端部区域可被称为下端部区域;第二端部区域,远离平坦拖把保持器,第二端部区域可被称为上端部区域;以及中心区域,在端部区域之间延伸。致动构件可布置在中心区域中和/或第二端部区域处,特别是在拖把把手的外周边上。中心区域和端部区域通常是清洁人员用左手或右手握住拖把系统的拖把把手的区域。例如,拖把把手可适于用第一手/左手或右手在中心区域中握住。可选地或附加地,拖把把手可适于用第二手/右手或左手在第二端部区域中握住。拖把把手可装备有至少一个用于夹持的夹持部分。夹持部分可包括纵向部分,该纵向部分相对于拖把把手的其余部分偏移,特别是升高或降低。夹持区域可装备有例如护罩、旋钮、钟形件、杆或另一防滑保护件。可选地或附加地,夹持区域可具有夹持辅助件,诸如橡胶表面和/或轮廓表面。致动构件优选地布置在第一夹持部分或第二夹持部分的区域中。可想到的是,两个夹持部分各自装备有致动构件。致动构件优选地适于并布置成可用一只手操作,特别是用手指,例如拇指操作,以便激活致动运动系统。致动构件优选地具有复位和/或预张紧装置,该复位和/或预张紧装置压迫致动构件到非激活起始位置中,在该非激活起始位置中,致动构件不引起致动运动系统的任何激活。例如,复位和/或预张紧装置可包括预张紧弹簧,该预张紧弹簧作用在致动构件上,并与致动构件的致动方向相反。拖把把手具有至少100cm的长度,优选地在120至240cm的范围内,特别是在160至220cm的范围内,优选地在180至200cm的范围内。
6、根据本发明的一个方面,该方面可与其它方面和实施方式相结合,拖把把手具有至少一个缆绳,该缆绳适于并布置成将激活力和/或运动从致动构件传递至致动运动系统。例如,缆绳可至少部分地在拖把把手的纵向轴线的方向上、在朝向拖把保持器的方向上向下平移地移动,以便激活致动运动系统。可选地或附加地,缆绳至少部分地在拖把把手的纵向轴线的方向上,远离拖把保持器地可向上平移地移动,以便激活致动运动系统。优选地,缆绳的运动是由致动构件引起的。特别地,缆绳执行与致动构件的相应运动对应的传递运动。优选地,致动构件以力传递方式连接至缆绳。缆绳可装备有预张紧装置和/或复位装置,复位装置使得缆绳执行与激活运动相反的复位运动。例如,缆绳可具有复位弹簧,在激活之后,当缆绳没有由致动构件致动或不再由致动构件致动时,该复位弹簧引起返回到起始位置。缆绳的预张紧和/或复位装置可另外在致动构件上施加复位动作。
7、拖把把手包括可相对于彼此伸缩地调节的多个拖把把手部分,其中,特别地,缆绳包括至少一个长度补偿装置,诸如缆绳随动件,该长度补偿装置适于并布置成与拖把把手部分的伸缩位置对应地、可变地调节的缆绳。长度补偿装置允许致动运动系统用致动构件激活,而与拖把把手的伸缩位置无关。拖把系统可具有两个或更多个拖把把手部分。长度补偿装置根据操作使缆绳适应于拖把把手部分的伸缩位置,使得与拖把把手部分在每个伸缩位置中相对于彼此的伸缩位置无关,致动构件位于该层中以激活致动运动系统。例如,相对于彼此可伸缩地调节的两个拖把把手部分可由具有至少部分地保持在其中的内拖把把手部分的外拖把把手部分来实现。长度补偿装置可布置在例如内拖把把手部分上,优选地在布置在外拖把把手部分的内部中的内拖把把手部分的端部上。长度补偿装置可具有用于缆绳的偏转装置,例如,偏转边缘或偏转滑轮。例如,缆绳可保持在第一拖把把手部分和/或第二拖把把手部分上,该第一拖把把手部分和/或第二拖把把手部分可相对于彼此移动,和/或可安装成使得长度补偿装置在可伸缩的拖把把手的长度改变的情况下经历相应的移位,使得缆绳适于对应的伸缩位置。借助于长度补偿装置,避免了在可伸缩的拖把把手的长度调节的情况下意外激活致动装置。
8、拖把把手包括至少一个缩回配置,其中拖把把手缩回到最小拖把把手伸缩长度。最小的拖把把手伸缩长度特别是在120cm±25cm的范围内,优选地在121±10cm的范围内。拖把把手包括至少一个延伸配置,其中拖把把手延伸至最大拖把把手伸缩长度。最大拖把把手伸缩长度特别是在180cm±25cm的范围内,优选地在181±10cm的范围内。延伸范围,即拖把把手的长度可调节性的累积范围,特别地在50cm至100cm的范围内,优选地在60cm至80cm的范围内,特别优选70cm。
9、拖把系统是可伸缩的。特别地,拖把系统包括至少一个缩回配置,其中拖把系统缩回到最小拖把把手伸缩长度。最小伸缩长度特别是在100cm至190cm的范围内,优选地在120cm至160cm的范围内,特别优选地在140至150cm的范围内。拖把系统的优选最小伸缩长度为145。拖把系统包括至少一个延伸配置,其中拖把系统延伸至最大伸缩长度。最大伸缩长度特别是在140cm至250cm的范围内,优选地在180cm至220cm的范围内,特别优选地在205cm至215cm的范围内。拖把系统的优选最大伸缩长度为210。显然,最小伸缩长度小于最大伸缩长度。由于大范围的伸缩性,天花板表面也可特别地按人体工程学进行处理。
10、外拖把把手部分优选地具有在950cm±25cm的范围内、特别是在950cm±10cm的范围内的长度。外拖把把手部分优选地是管状的。内拖把把手部分优选地具有100cm±25cm的范围内的长度,特别是在101cm±10cm的范围内的长度。内拖把把手部分优选地是管状的。内、管状拖把把手部分可接收结构加强件。结构加强件可例如由泡沫形成,诸如金属泡沫或聚合物泡沫,其中特别地,泡沫主要地填充管状内拖把把手部分,即至少50%、特别是至少75%、优选地至少90%、或完全填充管状内拖把把手部分。
11、根据拖把系统的进一步发展,在拖把把手的内腔中布置引导件。拖把把手优选地可形成为管状,特别是具有至少部分地圆化和/或多边形截面。特别地,拖把把手完全围绕引导件。引导件可至少部分地与拖把把手内侧功能性联结地形成。在拖把把手的内部中引导件和布置在其中的缆绳的布置一方面保护缆绳免受损坏,并且另一方面保护洁净室免受颗粒污染。优选地,具有缆绳的引导件在拖把把手的内腔中完全布置在拖把把手内。
12、根据拖把系统的优选的进一步发展,缆绳包括至少一个牵引缆绳和至少一个偏转装置。偏转装置可为例如偏转销或偏转滑轮。该至少一个牵引缆绳大体上沿着偏转装置引导,以便改变牵引缆绳的牵引方向,例如在45°至275°的范围内,优选地在180°±20°的范围内或在90°±10°的范围内改变角度。缆绳可包括多于一个的牵引缆绳。例如,不同的部分可由缆绳的不同的牵引缆绳形成。多个牵引缆绳可例如通过特别是可释放的联接件彼此连接。例如,缆绳可在拖把把手的下端部处具有第一偏转装置。附加地或可选地,缆绳可在拖把把手的上端部处,特别是在致动构件处具有第二偏转装置。可选地或附加地,缆绳可特别地在拖把把手部分的一个端部处具有另一偏转装置,该另一偏转装置位于另一拖把把手部分内。缆绳形成特别轻质的传递装置,并且因而非常适于清洁洁净室中的墙壁和/或天花板表面。另外,缆绳有利地提供了调节致动构件处的致动力的可能性,该致动力低于用于激活致动运动系统所需的激活力。以这种方式,可用小的力来实现致动构件的特别平滑的操作。
13、特别地,拖把系统的缆绳包括第一牵引缆绳,该第一牵引缆绳特别是在拖把把手的内腔中从拖把把手的第一端部延伸至致动构件,特别是拖把把手的相对的第二端部处。可选地,第一牵引缆绳可从致动构件延伸至致动运动系统。由于缆绳被用于从拖把把手的第二端部处的致动构件向相对的第一端部的力传递,与拖把把手上具有致动的其它拖把系统相比,可实现显著的重量减轻。具有从拖把把手的第一端部延伸至致动部分的牵引缆绳的拖把系统可特别容易地实现,并且因而容易由清洁人员操作。作为结果,可实现拖把系统,该拖把系统在该拖把系统的与拖把保持器相对的端部处具有手动致动件,该拖把系统可特别地按人体工程学进行操作和以适于洁净室的方式操作。
14、在具有缆绳和长度补偿装置的拖把系统的优选实施方式中,长度补偿装置包括缆绳中心滑道。缆绳中心滑道包括紧固至内拖把把手部分的端部的偏转装置,该偏转装置调节牵引缆绳的在该偏转装置和牵引缆绳的第一端部之间的补偿长度,该补偿长度对应于内拖把把手部分在外拖把把手部分内的插入长度。缆绳中心滑道的偏转装置优选地可特别是布置在内拖把把手部分的内端部处的另一偏转装置。
15、根据拖把系统的实施方式,拖把系统包括铰接连接件,特别是包括枢转-倾斜接头,拖把把手的第一端部通过铰接连接件连接或可连接至平坦拖把保持器。特别地,缆绳包括至少一个角度补偿装置,诸如牵引缆绳支承曲化部,其适于并布置成调节从致动构件到致动运动系统的激活力和/或运动的传递,而与拖把把手和拖把保持器之间的倾斜无关。例如,对于缆绳,铰接连接件可装备有牵引缆绳支承曲化部,该牵引缆绳支承曲化部具有优选地曲化的滑动表面,缆绳的牵引缆绳可沿着该滑动表面在拖把把手相对于拖把保持器的预定倾斜范围内进行引导。特别地,角度补偿装置布置成并适于抵消由于拖把把手相对于拖把保持器的倾斜而引起的缆绳的长度的改变。优选地,在枢转-倾斜接头的情况下,角度补偿装置布置成提供相对于精确地一个部分接头的角度补偿,该部分接头例如为旋转接头或倾斜接头,其中,特别地,角度补偿装置布置在拖把把手侧部分接头上。已经示出,在具有缆绳和没有角度补偿装置的拖把系统的一些实施方式中,拖把把手和拖把保持器之间的倾角的改变可导致致动运动系统的功能性的损害。在不利的倾角角度中,致动运动系统有时已经被激活,而不是由致动构件引起的。在另一不利的倾角角度中,尽管由致动构件有意激活,致动运动系统也没有发生激活。
16、在拖把系统的优选实施方式中,拖把系统包括缆绳和具有角度补偿装置的铰接连接件,角度补偿装置具有至少一个牵引缆绳支承曲化部。牵引缆绳支承曲化部可适于并布置成至少部分地在铰接连接件的中心、特别是与铰接纵向轴线同轴地引导至少一个牵引缆绳。可选地或附加地,牵引缆绳支承曲化部可在旋转和/或倾斜轴线的区域中与拖把把手的旋转和/或倾斜相反地横向支承至少一个牵引缆绳。横向支承可例如由牵引缆绳支承曲化部的圆化滑动轮廓来实现。
17、在优选的进一步发展中,拖把系统的铰接连接件具有可释放的致动联接件,该致动联接件以力传递方式将致动构件连接至致动运动系统。可优选的是,平坦拖把保持器和/或拖把把手可从铰接连接件释放。可选地或附加地,平坦拖把保持器或拖把把手可牢固地连接至铰接连接件,特别是以物质粘结或材料粘结的方式,优选以非破坏性可分离的方式。特别优选地,提供可释放的致动联接件,其对应于铰接连接件到拖把把手或平坦拖把保持器的可释放连接件。在可从平坦拖把保持器或拖把把手释放的铰接连接件中,可释放的致动联接件允许致动构件、特别是另外缆绳和致动运动系统彼此的可逆的可释放性和可连接性。铰接连接件和/或致动联接件可包括卡口连接件。优选地,铰接连接件和致动联接件以拖把把手或平坦拖把保持器的紧固立即伴随有致动联接件的力传递连接的这样的方式彼此匹配,用于在铰接连接件处将致动构件连接至致动运动系统。
18、根据拖把系统的实施方式,该拖把系统具有可释放的致动联接件和包括至少一个(第一)牵引缆绳的缆绳,该缆绳还包括第二牵引缆绳。第二牵引缆绳与第一牵引缆绳不同。第二牵引缆绳可在拖把保持器和铰接连接件中延伸。特别地,第二牵引缆绳以力传递方式将致动联接件连接至致动运动系统。可优选的是,拖把系统具有第一牵引缆绳和第二牵引缆绳,第一牵引缆绳将致动联接件的第一联接部分连接至致动构件,第二牵引缆绳将致动联接件的第二联接部分连接至致动运动系统。致动联接件优选地以第一联接部分可逆地与第二联接部分分离和/或第一联接部分可逆地可连接至第二联接部分的这样的方式可释放。第一联接部分和第二联接部分可形成例如协作爪式联接件。
19、在具有缆绳和可释放的致动联接件的拖把系统的优选实施方式中,致动联接件包括至少一个偏转装置,该偏转装置布置在第一把手端部处,并且承载联接板或滑块(第一联接部分)。优选地,偏转装置与第一牵引缆绳协作。偏转装置可特别地是缆绳的第一偏转装置。致动联接件特别地包括回位弹簧,该回位弹簧在第一把手端部的方向上压迫滑动楔形件或联接板。
20、根据进一步的发展,铰接连接件包括(第二)联接部分,该(第二)联接部分一方面连接至致动运动系统,并且另一方面可连接或可释放地连接至联接板或滑动楔形件(第一联接部分),以便将激活力和/或运动从致动构件传递至致动运动系统。优选地,第二联接部分通过第二牵引缆绳连接至致动运动系统。
21、根据优选实施方式,致动联接件布置在铰接内部中。铰接内部可由例如铰接连接件的套筒形状的轴环围绕,拖把把手的第一端部可被引入到该轴环中。可选地或附加地,可想到的是,拖把把手在其第一端部处具有接收器,铰接连接件的部分可至少部分地引入到该接收器中,并且当拖把把手连接至铰接连接件时,致动联接件布置在该接收器中。由于铰接连接件提供了受保护的铰接内部,在该铰接内部内,一方面用于在致动构件和可选的缆绳之间传递激活力和/或运动的连接,并且另一方面致动运动系统布置在铰接内部中,致动联接件被保护而免受外部影响干扰,并且颗粒释放的风险被最小化。
22、根据进一步的发展,铰接连接件具有卡扣式连接件,特别是卡口连接件,该卡扣式连接件适于并布置成以可释放的方式将拖把把手连接至平坦拖把保持器。卡扣式连接件可设置在铰接连接件和平坦拖把保持器之间。可选地或附加地,卡扣式连接件可设置在铰接连接件和拖把把手之间。例如,铰接连接件可具有卡扣式连接件,该卡扣式连接件为具有l形凹部的轴环的形式,并且拖把把手的第一端部具有形状上与铰接连接件的凹部互补的凸耳,并且该凸耳一起实现卡口式连接件。附加地或可选地,卡扣式连接件可具有特别地弹簧预张紧的固定销,用于以固定的方式将平坦拖把保持器或拖把把手保持在铰接连接件上,并且具有形状上与固定销互补的固定销接收器。例如,固定销接收器可形成在拖把把手中,并且在横向方向上弹簧预张紧的固定销可布置在铰接连接件上,并且当拖把把手塞入到铰接连接件上时,该固定销可释放地卡扣到固定销接收器中,以便将拖把把手和铰接连接件彼此紧固或固定紧固件,例如通过卡口连接件。
23、根据拖把系统的优选实施方式,致动构件包括按键按钮,特别是在拖把把手的夹持部分上,优选地在把手上,优选地在拖把把手的与拖把把手的第一端部相对的第二端部上。按键按钮对于拖把系统的特别容易的可操作性是有利的。按键按钮的致动方向可横向于拖把把手的纵向轴线定向,特别是径向定向。优选地,按键按钮的致动方向对应于拖把把手的纵向轴线,特别是平行的,优选为同轴的。
24、在具有缆绳和按键按钮的拖把系统的优选实施方式中,按键按钮优选地牢固地连接至牵引缆绳的特别是第二端部。特别是第二偏转装置布置在按键按钮的区域中。在按键按钮的区域中的特别是第二偏转装置可适于并布置成将按键按钮与牵引缆绳的端部的纵向运动转换成另一个,特别是相反的牵引缆绳部分运动。例如,按键按钮可在拖把保持器的方向上被按压,并且偏转装置可使牵引缆绳部分在相反的方向上远离拖把保持器移动。在按键按钮的区域中的特别是第二偏转装置可紧固至把手和/或拖把把手,特别是第二拖把把手部分和/或外拖把把手部分。
25、根据拖把系统的优选实施方式,拖把把手,优选地在夹持部分的区域中,特别是把手,和/或在拖把把手的中心区域或拖把把手的第二端部区域中,至少部分地具有圆化外轮廓,特别是球形旋钮。致动构件在形状上适于圆化外轮廓。优选地,夹持部分和致动构件在闩锁状态下形成共同的圆化表面,诸如圆柱形表面或球形表面。借助于形状上适于圆化外轮廓的致动构件,可避免无意的激活。特别地,在具有球形旋钮的实施方式的情况下,其中球形旋钮形成在拖把把手的第二端部处,且致动构件布置在该球形旋钮中,例如当清洁天花板表面时,所述形状适应的外轮廓有利地使得拖把系统在夹持区域处的人体工程学的保持不受致动构件的影响。
26、根据拖把系统的优选实施方式,致动运动系统包括至少一个机械闩锁件,诸如可平移移动的闩锁销和/或可旋转移动的旋转闩锁件。例如,致动运动系统包括至少一个闩锁销,当激活致动运动系统时,该闩锁销相对于接收器移动进入或移出,以便使平坦拖把保持器从第一状态改变到第二状态,在第一状态下,平坦拖把保持器布置成并适于保持拖把套,在第二状态中,平坦拖把保持器释放拖把套。可选地或附加地,致动运动系统包括可旋转移动的旋转闩锁件,诸如剪刀机构,其在激活致动运动系统时滑入或滑出,以便使平坦拖把保持器从第一状态改变到第二状态。
27、在可与其它实施方式结合的优选实施方式中,拖把系统在致动构件和致动运动系统之间具有至少一个特别是可释放的磁力联接件,其中,特别地,致动运动系统或可选致动联接件包括磁力联接件。磁力联接件可具有可彼此连接的第一/拖把保持器侧和第二/拖把把手侧磁性件和/或可磁化联接部分。可优选的是,当磁性件和/或可磁化联接部件彼此释放时,使致动运动系统从第一状态改变到第二状态。可选地或附加地,可提供磁力联接件作为致动运动系统的部分。例如,拖把保持器可包括至少一个拖把保持翼,该拖把保持翼相对于拖把保持器的另一部分可移动地安装,该另一部分为例如另一拖把保持翼。为了根据操作使用拖把系统,磁力联接件可布置成将一个或多个拖把保持翼保持在平坦位置中,在该平坦位置中拖把保持器可承载或共同承载平坦拖把套。通过释放磁力联接件,一个或多个拖把保持翼可从平的位置释放,以便例如通过弹簧张力和/或一个或多个拖把保持翼的自重呈现折叠位置,在折叠位置中,平坦拖把套从拖把保持器释放和/或拖把保持器可被引入到平坦拖把套中。例如,至少一个拖把保持翼可具有磁性或可磁化的力配偶件,该力配偶件适于并布置成与磁性或可磁化的反力配偶件配合。作为由致动部件致动的结果,致动运动系统可被实现和布置,以使得从力配偶件中去除反力配偶件,特别是平移地或旋转地,例如,在相对于磁主力方向的横向方向上。
28、可优选的是,拖把保持器,特别是平坦拖把保持器,和/或拖把把手包括碳纤维增强塑料或由碳纤维增强塑料组成。拖把保持器具有至多450g、特别是至多300g、优选地至多200g或至多150g的重量。特别地,拖把保持器包括至少50%、至少60%或至少80%或至少95%的碳纤维增强塑料(cfrp),优选地至少90%的碳纤维增强塑料,特别优选地至少95%的碳纤维增强塑料。碳纤维增强塑料的比例特别是相对于拖把保持器的表面、优选地相对于拖把保持器的朝向地板定向的侧面的表面进行确定。应当清楚的是,拖把保持器的纤维增强塑料的比例不考虑用于将拖把保持器和拖把把手彼此连接的连接件,特别是由铰接连接件实现的连接件。可选地或另外地,拖把系统可具有在400g至800g的范围内的总重量,特别是在500g至700g的范围内,优选地在580g至680g的范围内。由于拖把保持器以重量减轻的方式形成,例如,利用碳纤维增强塑料材料,可为清洁人员提供特别有效的工作便利。拖把保持器可包括多个拖把保持器部分,特别是拖把保持翼,该多个拖把保持器部分可相对于彼此移动。拖把保持翼可沿着在拖把宽度方向上的枢转轴线可横向折叠或者沿着在拖把纵向方向上的枢转轴线可纵向折叠。
29、根据一个实施方式,拖把保持器可实现为具有第一拖把保持翼和第二拖把保持翼的平坦拖把保持器。优选地,拖把保持翼各自具有翼上侧和翼下侧。拖把保持翼具有彼此相对安置的两个横向边缘和彼此相对安置的两个纵向边缘,其中在每种情况下,一个外纵向边缘指向远离另一拖把保持翼的方向。特别地,拖把保持翼可具有彼此相向的内纵向边缘。拖把保持翼的纵向边缘比其横向边缘长。优选地,拖把保持器的纵向边缘的纵向长度大于拖把保持器的横向宽度。拖把保持器的横向宽度可由第一拖把保持翼的横向边缘和第二拖把保持翼的横向边缘的累积横向宽度来限定。优选地,拖把保持器和/或拖把保持翼具有大体上矩形的基本形状。平坦拖把保持器的纵向范围可对应于第一拖把保持翼和/或第二拖把保持翼的对应的纵向长度。拖把保持器的纵向范围可在35至55cm的范围内,特别是在45至50cm的范围内,优选地近似48cm。附加地或可选地,拖把保持器的宽度可在8或10至20cm的范围内,特别是在12至17cm的范围内,优选地近似14.5cm。两个拖把保持翼中的至少一个可相对于另一拖把保持翼移动。优选地,第二拖把保持翼可相对于第一拖把保持翼和紧固或可紧固至第一拖把保持翼的连接件可枢转。可优选的是,拖把保持翼中的一个,特别是第二拖把保持翼,可相对于另一拖把保持翼绕平坦拖把保持器的纵向轴线枢转。
30、根据本发明的另一方面,该另一方面可与以上的一个或多个结合,提供了用于拖把系统的拖把把手,特别是由碳纤维增强塑料组成的或包括碳纤维增强塑料的用于清洁洁净室的拖把系统。可优选的是,拖把把手包括碳纤维增强塑料。拖把把手可至少部分地用碳纤维增强塑料或由碳纤维增强塑料形成。可想到的是,拖把把手具有一个或多个碳纤维增强塑料层。可选地,可优选的是,拖把把手由碳纤维增强塑料构成。拖把把手具有至多800g的重量,特别是至多600g,优选地至多500g或至多400g。特别地,拖把把手包括至少50%、至少60%或至少80%的碳纤维增强塑料,优选地至少90%,特别优选地至少95%的碳纤维增强塑料,特别是相对于拖把把手表面的面积或拖把把手在其纵向轴线方向上的长度。拖把把手,也可被称为柄,构成传统拖把系统的大部分重量。通过使用碳纤维增强塑料代替通常的不锈钢或厚壁塑料实施方式,可实现相当大的重量减轻。使用由碳纤维增强塑料组成或包括碳纤维增强塑料的拖把把手允许使用拖把系统,特别是用于清洁墙壁和/或天花板较长的时间和较低的物理应力。令人惊奇的是,已经发现碳纤维增强塑料具有允许用于清洁洁净室的材料性质。
31、根据一个实施方式,拖把保持器、连接件和/或拖把把手包括塑料材料,特别是从由优选环氧树脂的热固性材料、热塑性材料及其混合物组成的群组中选择。热塑性塑料可优选地从由聚酰胺(pa)、优选聚丙烯(pp)的聚烯烃、聚醚酰亚胺(pei)、聚砜(psu)、聚醚醚酮(peek)、优选聚甲醛(pom)的聚缩醛、聚偏二氟乙烯(pvdf)、聚苯砜(ppsu)、聚醚砜(pes)、聚酰胺酰亚胺(pai)、聚苯并咪唑(pbi)及其混合物组成的群组中选择。拖把系统可包括不同的塑料材料。例如,纤维增强的,特别是碳纤维增强的拖把保持器或拖把把手部分可包括第一塑料材料,特别是作为基质材料。拖把系统可包括不同的、第二、第三和/或其它塑料材料。特别地,拖把系统的把手可包括特别是第二塑料材料或由特别是第二塑料材料组成。特别地,拖把系统的连接件可包括特别是第三塑料材料或由特别是第三塑料材料组成。特别地,拖把系统的锁定装置可包括特别是第四塑料材料或由特别是第四塑料材料组成。连接件、锁定装置和/或把手的塑料材料特别是热塑性材料,优选地从由聚酰胺、优选聚丙烯的聚烯烃、聚醚酰亚胺、聚砜、聚醚醚酮、优选聚甲醛的聚缩醛、聚偏二氟乙烯、聚苯砜、聚醚砜、聚酰胺酰亚胺、聚苯并咪唑及其混合物组成的群组中选择。连接件、锁定装置和/或把手的塑料材料可特别优选地是pom、pom-gf(玻璃纤维增强pom)、pa-gf(玻璃纤维增强pa)、pp矿物增强(特别是滑石增强)、pei、psu或peek。
32、根据实施方式,拖把把手包括至少一个管状拖把把手部分。拖把把手部分也可被称为柄部分区段。拖把把手部分具有至多400g的重量,特别是至多300g,优选地至多200g或至多150g。管状拖把把手部分可包括碳纤维增强塑料或由碳纤维增强塑料组成。拖把把手部分可至少部分地用碳纤维增强塑料或由碳纤维增强塑料形成。可想到的是,拖把把手部分具有一个或多个碳纤维增强塑料层。特别地,管状拖把把手部分具有在0.01mm至3mm的范围内的壁厚。管状拖把把手部分优选地具有至多1mm的壁厚,特别是至多0.5mm,优选地小于0.3mm。管状拖把把手部分的壁厚可为至少0.05mm或至少0.1mm。
33、碳纤维增强塑料包括基质材料和纤维材料或者由基质材料和纤维材料组成。基质材料包括热固性塑料和/或热塑性塑料或者由热固性塑料和/或热塑性塑料组成,热固性塑料和/或热塑性塑料特别是环氧树脂、聚酯树脂、乙烯基酯树脂或其混合物。纤维材料包括碳纤维或由碳纤维组成,碳纤维特别是碳纳米管。碳纤维增强塑料可具有在1.5至1.6g/cm3的范围内的密度,特别是在1.53至1.58g/cm3的范围内,优选地约1.55g/cm3。拖把系统的拖把把手、拖把保持器、连接件和/或其它组件可各自例如通过手工层压制造,特别是与真空压制、高压釜方法、注塑方法(特别是树脂传递模制或反应注塑模制)、卷绕方法或压制方法(特别是热压方法、湿压方法或预浸料方法)组合制造。特别地,拖把系统的包括碳纤维增强塑料或由碳纤维增强塑料组成的拖把把手、拖把保持器、连接件和/或另一组件可具有0.01mm至3mm的范围内的壁厚,优选地至多1mm,更优选地至多0.5mm,特别优选地小于0.3mm。特别地,碳纤维增强塑料包括至少50%的碳纤维,优选地在60%和80%之间,特别优选地约70%的碳纤维。另外,纤维增强塑料包括不超过50%的基质材料,优选地在20%和40%的基质材料之间,特别优选地约30%的基质材料。该比例可基于wt.%。可优选的是,纤维增强塑料具有斜纹织物,特别是2×2斜纹织物,诸如3k斜纹2×2。纤维材料可优选地具有不超过0.5mm的纤维直径,优选地不超过0.3mm,特别优选地为0.2mm的纤维直径和/或至少0.1mm的纤维直径。纤维增强塑料材料,特别是碳纤维增强塑料材料,可特别地由(碳)纤维板或(碳)纤维管的形式的预浸料材料形成。预浸料材料可具有单向纤维层。预浸料材料可包括预浸料织物层。特别地,预浸料材料层具有至少0.03mm的厚度,优选地至少0.075mm,和/或不超过0.3mm,优选地不超过0.2mm或不超过0.15mm。(碳)纤维材料由至少一个预浸料材料层形成,特别是至少两个预浸料材料层,和/或不超过15个预浸料材料层,优选地不超过11个预浸料材料层,特别优选地不超过4个预浸料材料层。
34、根据优选实施方式,(a)拖把保持器、连接件和/或拖把把手包括塑料材料,特别是来自由优选环氧树脂的热固性材料、热塑性材料及其混合物组成的群组,(b)拖把保持器,特别是平坦拖把保持器,和/或拖把把手包括碳纤维增强塑料,(c)至少一个牵引缆绳包括液晶聚丙烯,和/或(d)拖把系统,特别是至少一个可移动的、特别是可旋转移动的组件,不锈钢和/或硅酮。可优选的是,拖把保持器和/或拖把把手至少部分地由碳纤维增强塑料组成。特别地,所述至少一个牵引缆绳可由液晶聚合物组成。特别地,牵引缆绳可由液晶聚合物纺成。液晶聚合物可特别是芳族聚酯。牵引缆绳可包括例如分别以商标名称vectran或vectalinetm销售的材料或由例如分别以商标名称vectran或vectalinetm销售的材料组成。还可优选的是,至少一个可移动的、特别是可旋转移动的组件,诸如接头组件,例如接头销等,由不锈钢构成。特别地,至少(a)和(b)、(a)和(c)、(a)和(d)、(b)和(c)、(b)和(d)、和/或(c)和(d),或者至少(a)和(b)和(c)、(a)和(b)和(d)、(a)和(c)和(d)或者(b)和(c)和(d)在拖把把手中实现。可优选的是,拖把把手根据(a)、(b)、(c)和(d)来实现。这种拖把把手由于特别良好的适用性而适于在洁净室中进行人体工程学处理。
35、根据可与以上组合的实施方式,拖把系统在高达至少100℃是耐热的,特别是120℃,优选地140℃下是耐热的。具体地,拖把系统适于并布置成在121℃下高压灭菌长达25分钟或在134℃下高压灭菌长达6分钟。可选地或附加地,拖把系统耐清洁剂、溶剂和/或消毒剂,特别是从由表面活性剂、酸、漂白剂、酶、醇溶液及其混合物组成的群组中选择。
36、根据本发明,提供了特别是如上所述实现的拖把系统,用于清洁地板、墙壁和/或天花板,特别是在优选无菌洁净室中的地板、墙壁和/或天花板。
37、根据本发明,可提供上述拖把系统是部件套件的部分,该部件套件还包括至少一个平坦拖把套,特别是多个平坦拖把套。
本文地址:https://www.jishuxx.com/zhuanli/20240615/62234.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表