一种步行辅助装置的制作方法
- 国知局
- 2024-07-11 16:00:08
本技术涉及一种步行辅助装置,具体涉及一种用于提高人在奔跑或行走过程中的能量利用效率的步行辅助装置(本文中把奔跑和行走统称为步行)。
背景技术:
1、在自然界中有很多善于奔跑的动物,比如马、羚羊、袋鼠、鸵鸟等等,这些动物在奔跑的过程中具有很高的能量利用效率,原因在于这些动物的腿部具有良好的弹性,有利于奔跑过程中的机械能的储存。与之相比,人类无论是在奔跑还是在行走的过程中,其能量利用效率则都显得偏低,原因在于人类双腿的弹性不佳、不利于奔跑过程中的机械能的储存,而且我认为原因还在于人类的腿不够长、步子迈得不够大从而导致了更多的能量消耗在了频繁迈步的动作中。
2、尽管如此,也尽管人类早已发明了自行车、摩托车等各种轮式代步工具,但是人们对于步行依然充满着热爱。寻找一种步行辅助装置来弥补人类自身的先天不足提高步行能力,一直以来都是人们孜孜以求的目标。
3、早在上世纪80年代,有两位美国的工程师共同发明了一种名为spring walker的纯机械式外骨骼。该外骨骼能够有效增大穿戴者的迈步幅度,同时也具有一定的弹性储能效果,但是其结构太过复杂以至于很难在实际中得到推广与应用。
4、后来,人们又陆续发明了结构上相对简单的弹跳高跷、仿生袋鼠鞋、仿生鸵鸟鞋等各种各样的具有弹性储能效果的鞋子,这些鞋子在结构上都包括鞋子本体和设置于鞋子本体下方的弹性体(此处以及下文所说的弹性体可以是弹性部件也可以是弹性机构),在本质上都可以称作弹跳鞋。然而,在实际使用中这些弹跳鞋对于穿戴者的步行效率的提升并不明显。经过苦苦思索之后我认为主要原因在于:这些弹跳鞋的弹性体的尺寸还不够大,以至于其弹性储能效果还不够理想,其实这也是由这些鞋子本身的穿戴方式所决定的。这些鞋子在穿戴时基本上都是直接固定在穿戴者膝盖以下的小腿上,考虑到穿戴者的舒适性,鞋子下面的弹性体在尺寸上就不可能做得太大。而且正是由于这种穿戴方式,如果穿戴者一不小心跌倒了,则又极有可能对自己的膝关节造成严重的损伤。
5、另一方面,高脚马作为一种传统的娱乐工具,在我国早在先秦时期就已经被发明了出来,其在结构上左右成对,包括左半部分和右半部分,每半部分仅由手扶杆和固定在手扶杆下端的脚踏板构成,穿戴者只需左右脚分别踩在相应的脚踏板上、左右手分别握住相应的手扶杆的顶端即可实现穿戴。高脚马的这种简单的结构和简单、舒适、安全的穿戴方式,可谓浑然天成、大道至简,体现了我国古代劳动人民的伟大智慧!于是,经过深思熟虑之后我觉得:借鉴蕴藏在高脚马中的伟大智慧来弥补上述弹跳鞋的不足之处,从而创造出一种具有更好弹性储能效果、更舒适、更安全的步行辅助装置,岂不美哉!
技术实现思路
1、综上所述本实用新型的目的就在于,对蕴藏在高脚马中的伟大智慧进行充分地借鉴与吸收,从而创造出一种全新的步行辅助装置,该步行辅助装置能够显著地提高人在步行过程中的能量利用效率。
2、本实用新型的技术方案如下:
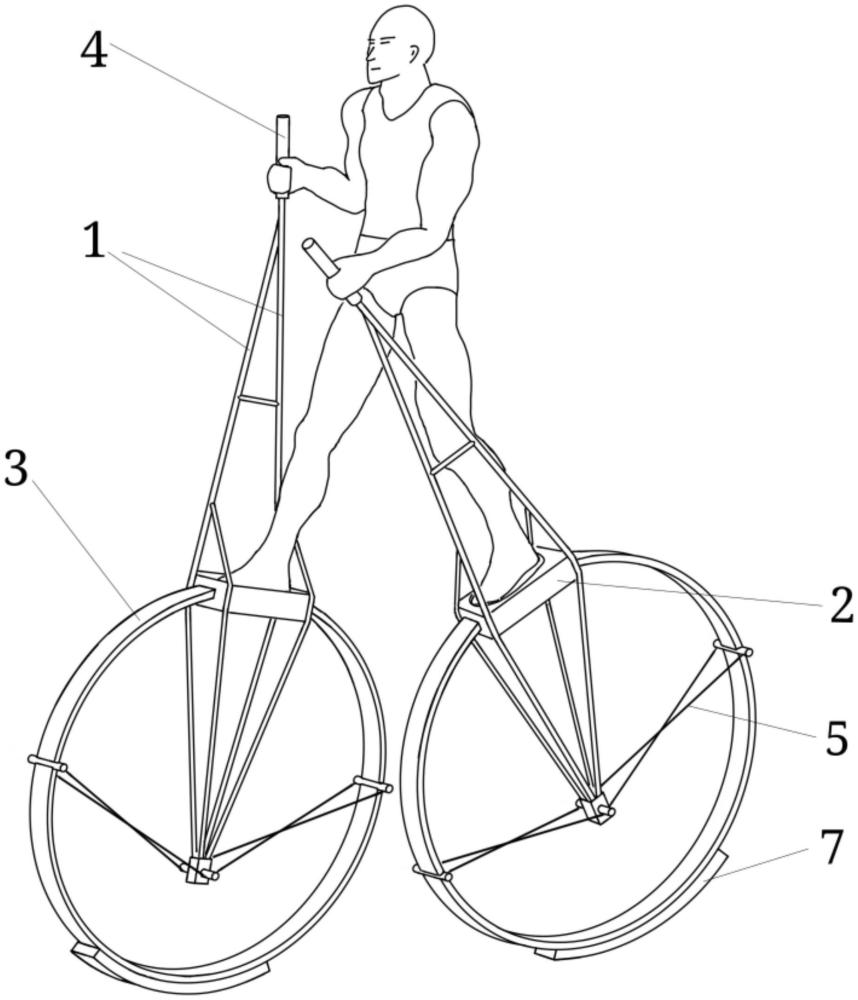
3、一种步行辅助装置,包括左半部分和右半部分,所述左半部分和所述右半部分彼此之间左右对称,每半部分又包括手扶杆、脚踏板和弹性体,所述脚踏板固定在所述手扶杆的下端,所述脚踏板和所述手扶杆通过所述弹性体支撑于地面。
4、进一步地,上述弹性体可以优选为:该弹性体既能够在垂直于所述脚踏板的方向上发生弹性形变,又能够在平行于所述脚踏板的方向上发生弹性形变。(毕竟自然界中不存在绝对的刚体,这里所说的弹性形变是指能够有效储存弹性势能的弹性形变)
5、进一步地,还可以在上述脚踏板的上表面开设用来容纳脚的凹槽,以防止穿戴者的脚在所述脚踏板上产生滑动。
6、进一步地,上述手扶杆还可以采用桁架结构,并且在其顶端设置手柄以便于穿戴者抓握。
7、进一步地,上述弹性体可以优选为环状弹性体,并且所述环状弹性体固定连接于所述脚踏板。此时,上述手扶杆在与所述脚踏板固定连接之后还可以继续往下延伸一部分,该延伸部分能够有效防止所述环状弹性体因发生过度形变而损坏;而且还可以从该延伸部分分别向所述环状弹性体的前端和后端连接弹性绳,这样可以充分利用所述环状弹性体的内部空间,在不更换所述环状弹性体的前提下增强其弹力。
8、本实用新型至少具有如下有益效果:
9、与上述弹跳鞋相比,本实用新型的步行辅助装置充分借鉴了我国传统的高脚马,穿戴者只需左右脚分别踩在左右脚踏板上、左右手分别握住左右手扶杆的顶端即可实现穿戴,这种穿戴方式具有更高的舒适性和安全性,因此其弹性体的尺寸可以做得足够大,从而具有更好的弹性储能效果;而且,伴随着弹性体尺寸的增大则又相当于增加了穿戴者双腿的长度,使穿戴者的步子迈得更大,从而更有利于提高步行过程中的能量利用效率。
10、经过了更加深入地研究之后,我发现人在奔跑或行走的过程中,双脚既有在上下方向上的加速和减速又有在前后方向上的加速和减速,每一只脚在落地时其在前后方向上的速度分量和其在上下方向上的速度分量都会减小为零,而人体自身肌肉组织的弹性储能效果并不理想,于是就造成了动能的浪费。而本实用新型中步行辅助装置的弹性体还可以进一步地优选为:既能够在垂直于脚踏板的方向上发生弹性形变,又能够在平行于脚踏板的方向上发生弹性形变。这样一来,穿戴者的双脚在上下和前后两个方向上的动能就都能够以弹性势能的形式储存在所述弹性体中而得到有效的回收和再利用,从而最大程度地提高了能量的利用效率。
技术特征:1.一种步行辅助装置,其特征在于,包括左半部分和右半部分,所述左半部分和所述右半部分彼此之间左右对称,每半部分又包括手扶杆、脚踏板和弹性体,所述脚踏板固定在所述手扶杆的下端,所述脚踏板和所述手扶杆通过所述弹性体支撑于地面。
2.根据权利要求1所述的步行辅助装置,其特征在于,所述弹性体既能够在垂直于所述脚踏板的方向上发生弹性形变,又能够在平行于所述脚踏板的方向上发生弹性形变。
3.根据权利要求1所述的步行辅助装置,其特征在于,所述手扶杆采用桁架结构,并且在其顶端设置有手柄。
4.根据权利要求2所述的步行辅助装置,其特征在于,所述弹性体为环状弹性体,并且所述环状弹性体固定连接于所述脚踏板。
5.根据权利要求4所述的步行辅助装置,其特征在于,所述手扶杆在与所述脚踏板固定连接之后还继续往下延伸一部分。
6.根据权利要求5所述的步行辅助装置,其特征在于,所述手扶杆的下方延伸部分分别向所述环状弹性体的前端和后端连接有弹性绳。
技术总结本技术公开了一种步行辅助装置,包括左半部分和右半部分,所述左半部分和所述右半部分彼此之间左右对称,每半部分又包括手扶杆、脚踏板和弹性体,所述脚踏板固定在所述手扶杆的下端,所述脚踏板和所述手扶杆通过所述弹性体支撑于地面。穿戴者只需左右脚分别踩在左右脚踏板上、左右手分别握住左右手扶杆的顶端即可实现穿戴,该步行辅助装置能够有效提高穿戴者在奔跑或行走过程中的能量利用效率。技术研发人员:曹飞飞受保护的技术使用者:曹飞飞技术研发日:20230825技术公布日:2024/3/31本文地址:https://www.jishuxx.com/zhuanli/20240615/76939.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表