一种多机器人室外场景捡球系统及方法与流程
- 国知局
- 2024-07-11 16:04:14
本发明属于机器人,尤其涉及一种多机器人室外场景捡球系统及方法。
背景技术:
1、现在人们对健康的关注度一直很高,乐意走到户外,去参加一些户外运动。球类运动因其具有锻炼和社交的属性,一直很受欢迎。而有一些室外的球场地很大,如足球、高尔夫球,橄榄球等场地,它们场地更大,需要一些自动化的方式帮助人们专注于运动,而不是浪费时间捡远处的球。同时,很多球类运动员的需要更多的时间去训练,那么更不能把时间浪费在捡球上。宽阔的场地,人工捡球不仅慢而且球场边缘具有一定的安全风险性。而单一的捡球机器无法满足快速覆盖整的场地的需要,不能满足使用快速性的要求。因此需要多机器人能够在场地中更快更安全的收集散落的球,一种能符合多室外场景要求的多机器人合作系统就很有必要。
技术实现思路
1、为解决上述技术问题,本发明提出一种多机器人室外场景捡球系统及方法。
2、本发明第一方面公开了一种多机器人室外场景捡球方法,每个机器人均包括移动模块、定位模块、图像获取模块、检测模块、抓取模块以及通信模块;
3、所述方法包括:
4、步骤s1,以gps的方式设定搜寻范围,结合机器人的数量及各定位模块检测的机器人初始位置信息对搜寻范围进行划分,以使每个机器人在各自的任务区域内进行场地巡视;每个机器人在进行场地巡视时,利用通信模块共享各自的位置信息,并执行以下步骤:
5、步骤s2,所述图像获取模块拍摄周围环境的rgb图像和深度图像;
6、步骤s3,所述检测模块根据所述rgb图像中的颜色和形状信息识别出图像中是否有球体,如果有球体,利用所述深度图像的深度信息计算出球体与该机器人的相对位置,并通过通信模块将球体位置信息进行共享;
7、步骤s4,根据共享的球体位置信息和各机器人的位置信息,选定最近的空闲机器人为捡球任务机器人,所述捡球任务机器人利用所述移动模块靠近球体,并利用所述抓取模块收集球体。
8、根据本发明第一方面的方法,在所述步骤s1中,所述以gps的方式设定搜寻范围,结合机器人的数量及各定位模块检测的机器人初始位置信息对搜寻范围进行划分的步骤包括:
9、将所述搜寻范围内的场地划分为多个栅格,根据机器人数量平分所述多个栅格得到多个任务区域,并根据机器人的初始位置信息,将相应的任务区域匹配给对应的机器人。
10、根据本发明第一方面的方法,在所述步骤s1中,所述利用通信模块共享各自的位置信息包括:
11、定位模块获取机器人的gps坐标;
12、选定一机器人的上电位置为坐标原点,并对各机器人的gps坐标进行坐标转换。
13、根据本发明第一方面的方法,每个机器人在进行场地巡视时,会通过z字形遍历栅格得到路线。
14、根据本发明第一方面的方法,在步骤s4中,所述捡球任务机器人利用所述移动模块靠近球体时,执行其余任务的机器人会避障远离所述捡球任务机器人。
15、根据本发明第一方面的方法,在步骤s4中,所述利用所述抓取模块收集球体的步骤包括:
16、将球体位置信息转换到所述抓取模块的末端执行器坐标系下,并利用a*算法规划末端执行器的路径;
17、对所述末端执行器的路径进行路径点插值和位姿插值,并根据逆运动学求解关节轨迹;
18、利用贝塞尔曲线进行插值,为关节轨迹插入相应的时间参数,以获取预定轨迹;
19、所述抓取模块按照所述预定轨迹移向目标球体并抓取。
20、根据本发明第一方面的方法,在步骤s4中,所述利用所述抓取模块收集球体的步骤包括:
21、将球体位置信息转换到所述抓取模块的末端执行器坐标系下,并利用rrt*算法规划末端执行器的路径;
22、对所述末端执行器的路径进行路径点插值和位姿插值,并根据逆运动学求解关节轨迹;
23、利用b样条曲线进行插值,为关节轨迹插入相应的时间参数,以获取预定轨迹;
24、所述抓取模块按照所述预定轨迹移向目标球体并抓取。
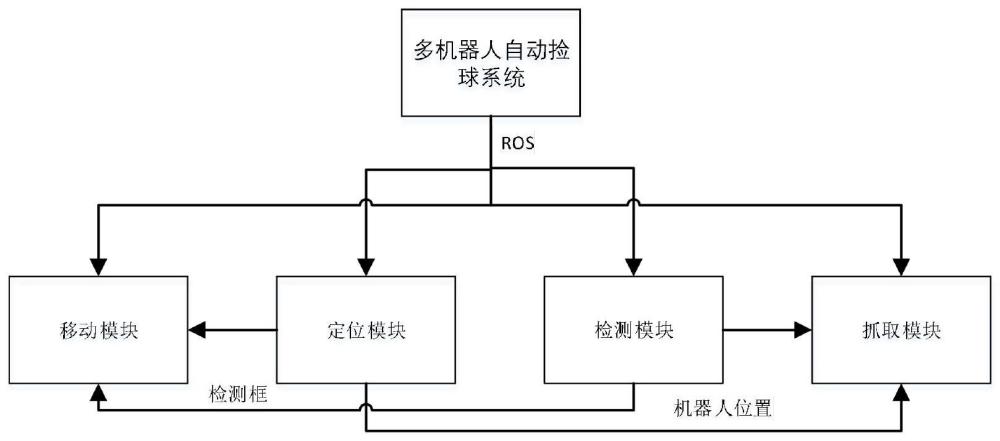
25、本发明第二方面公开了一种多机器人室外场景捡球系统,所述系统包括多个机器人和控制模块,每个机器人均包括移动模块、定位模块、图像获取模块、检测模块、抓取模块以及通信模块;
26、所述控制模块以gps的方式设定搜寻范围,结合机器人的数量及定位模块检测的初始位置信息对搜寻范围进行划分,以使每个机器人在各自的任务区域内进行场地巡视;
27、每个机器人在进行场地巡视时,通过通信模块共享各自的位置信息;所述图像获取模块拍摄周围环境的rgb图像和深度图像;所述检测模块根据所述rgb图像中的颜色和形状信息识别出图像中是否有球体,如果有球体,利用所述深度图像的深度信息计算出球体与该机器人的相对位置,并通过通信模块将球体位置信息进行共享;根据共享的球体位置信息和各机器人的位置信息,选定最近的空闲机器人为捡球任务机器人,所述捡球任务机器人利用所述移动模块靠近球体,并利用所述抓取模块收集球体。
28、本发明第三方面公开了一种电子设备。电子设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时,实现本公开第一方面中任一项的一种多机器人室外场景捡球方法中的步骤。
29、本发明第四方面公开了一种计算机可读存储介质。计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现本公开第一方面中任一项的一种多机器人室外场景捡球方法中的步骤。
30、综上,本发明提出的方案具备如下技术效果:本发明考虑了多机器人协同的情况,能够根据场景大小进行数量的调整,保证完成任务的时间。本发明用于捡球可以节省时间,同时节省了人力,成本较小。
技术特征:1.一种多机器人室外场景捡球方法,其特征在于,每个机器人均包括移动模块、定位模块、图像获取模块、检测模块、抓取模块以及通信模块;
2.根据权利要求1所述的一种多机器人室外场景捡球方法,其特征在于,在所述步骤s1中,所述以gps的方式设定搜寻范围,结合机器人的数量及各定位模块检测的机器人初始位置信息对搜寻范围进行划分的步骤包括:
3.根据权利要求2所述的一种多机器人室外场景捡球方法,其特征在于,在所述步骤s1中,所述利用通信模块共享各自的位置信息包括:
4.根据权利要求1所述的一种多机器人室外场景捡球方法,其特征在于,每个机器人在进行场地巡视时,会通过z字形遍历栅格得到路线。
5.根据权利要求1所述的一种多机器人室外场景捡球方法,其特征在于,在步骤s4中,所述捡球任务机器人利用所述移动模块靠近球体时,执行其余任务的机器人会避障远离所述捡球任务机器人。
6.根据权利要求1所述的一种多机器人室外场景捡球方法,其特征在于,在步骤s4中,所述利用所述抓取模块收集球体的步骤包括:
7.根据权利要求1所述的一种多机器人室外场景捡球方法,其特征在于,在步骤s4中,所述利用所述抓取模块收集球体的步骤包括:
8.一种多机器人室外场景捡球系统,其特征在于,所述系统包括多个机器人和控制模块,每个机器人均包括移动模块、定位模块、图像获取模块、检测模块、抓取模块以及通信模块;
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时,实现权利要求1至7中任一项所述的一种多机器人室外场景捡球方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现权利要求1至7中任一项所述的一种多机器人室外场景捡球方法中的步骤。
技术总结本发明提出一种多机器人室外场景捡球系统及方法,该方法包括:以GPS的方式设定搜寻范围,结合机器人的数量及各机器人初始位置信息对搜寻范围进行划分;每个机器人在进行场地巡视时,利用通信模块共享各自的位置信息,图像获取模块拍摄周围环境的RGB图像和深度图像;检测模块根据RGB图像识别出图像中是否有球体,如果有球体,利用深度图像计算出球体与该机器人的相对位置,并通过通信模块将球体位置信息进行共享,以选定捡球任务机器人,捡球任务机器人利用移动模块靠近球体,并利用抓取模块收集球体。本发明考虑了多机器人协同的情况,能够根据场景大小进行数量的调整,保证完成任务的时间。本发明用于捡球可以节省时间,同时节省了人力,成本较小。技术研发人员:刘梦杰受保护的技术使用者:中国电子科技南湖研究院技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240615/77292.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种乒乓球分球送球机构
下一篇
返回列表