具有可调节椭圆跨步运动的锻炼机器的制作方法
- 国知局
- 2024-07-11 16:17:28
本公开涉及锻炼机器,尤其涉及便于用户调节椭圆跨步运动的锻炼机器。
背景技术:
1、以下美国专利通过引用并入本文中:
2、美国专利公开no.2021/0275866公开了一种用于进行跨步锻炼运动的锻炼机器。锻炼机器具有框架、第一踏板构件和第二踏板构件;分别在第一踏板构件和第二踏板构件上的第一脚垫和第二脚垫,第一脚垫和第二脚垫中的每个在跨步锻炼运动期间沿椭圆路径可移动;以及第一摇臂和第二摇臂,第一摇臂和第二摇臂中的每个具有相对于框架围绕摇臂枢转轴线可枢转的第一端,并且还具有相对于第一踏板构件和第二踏板构件中的一者围绕踏板杆轮毂轴线可枢转的第二端。框架具有第一框架部和第二框架部。第一框架部支撑第一摇臂和第二摇臂,并且围绕框架枢转轴线相对于第二框架部可枢转。第一框架部相对于第二框架部的枢转调节摇臂枢转轴线的位置,从而改变椭圆路径的形状。
3、美国专利no.10,946,238公开了一种用于进行跨步锻炼运动的锻炼机器。该机器具有框架;第一踏板构件和第二踏板构件;分别在第一踏板构件和第二踏板构件上的第一脚垫和第二脚垫,第一脚垫和第二脚垫中的每个构造成在跨步锻炼运期间沿椭圆路径移动;可枢转地联接到框架的第一摇臂和第二摇臂;以及第一调节装置和第二调节装置,该第一调节装置和第二调节装置构造成分别主动地调节和设定第一踏板构件和第二踏板构件相对于第一摇臂和第二摇臂的位置,从而改变椭圆路径的形状。
4、美国专利no.10,478,665公开了一种具有框架以及联接到框架的第一踏板和第二踏板使得站在第一踏板和第二踏板上的用户可以进行跨步锻炼的锻炼设备。第一踏板和第二踏板每个都具有踏面构件,该踏面构件以促进用户的脚在跨步锻炼期间相对于踏面构件运动的方式支撑用户的脚的底部。
5、美国专利no.9,925,412公开了一种包括连杆机构组件的锻炼装置,该连杆机构组件将驱动构件链接到从动构件,使得驱动构件的圆周旋转引起从动构件的大致相同的圆周旋转。连杆机构组件包括链接构件、第一曲柄臂和第二曲柄臂,该第一曲柄臂将驱动构件连接到链接构件,使得驱动构件的旋转引起链接构件的运动,该第二曲柄臂将链接构件连接到从动构件,使得链接构件的运动引起从动构件的旋转。至少一个附加曲柄臂在旋转轴线处连接链接构件,该旋转轴线从通过第一曲柄臂旋转轴线和第二曲柄臂旋转轴线的直线横向偏移。
6、美国专利no.9,283,425公开了一种锻炼组件,该锻炼组件具有框架和细长形脚踏板构件,每个脚踏板构件沿着不同尺寸的用户定义的路径可移动。每个脚踏板构件具有前部部分和后部部分。脚垫设置在第一脚踏板构件和第二脚踏板构件中的一者的后部部分上。细长形联接臂具有下部部分和上部部分,该上部部分可枢转地连接到框架。曲柄构件具有第一部分和第二部分,该第一部分可枢转地连接到第一脚踏板构件和第二脚踏板构件中的一者的前部部分,该第二部分可枢转地连接到第一联接臂和第二联接臂中的一者的下部部分,使得每个曲柄构件在圆形路径中可旋转。细长形摇臂具有下部部分和上部部分,该下部部分在脚垫和曲柄构件之间可枢转地连接到第一脚踏板构件和第二脚踏板构件中的一者,该上部部分可枢转地连接到框架。
7、美国专利no.9,138,614公开了一种具有细长形的第一摇臂和第二摇臂的锻炼组件,该细长形的第一摇臂和第二摇臂围绕第一枢转轴线以剪刀状运动相对于彼此枢转。滑动件具有滑动件本体,该滑动件本体沿延伸穿过第一枢转轴线并垂直于第一枢转轴线的线性轴线滑动。连杆机构将第一摇臂和第二摇臂可枢转地联接到滑动件本体。第一摇臂和第二摇臂相对于彼此的枢转导致滑动件本体沿着线性轴线在第一方向上滑动。第一摇臂和第二摇臂相对于彼此的相反枢转导致滑动件本体沿着线性轴线在相反的第二方向上滑动。
8、美国专利no.9,126,078和no.8,272,997公开了一种椭圆踏步锻炼设备,其中可以使用动态连杆机构来改变机器的跨步长度。控制系统还可以用于作为各种锻炼和操作参数(例如速度和方向)的函数来改变跨步长度,以及作为预编程锻炼程序(例如山地或间歇训练程序)的一部分来改变跨步长度。此外,控制系统可以使用跨步长度的测量结果来优化设备的操作。
9、美国专利no.7,931,566公开了一种椭圆交叉训练器,其具有由用户接合的连杆机构驱动的旋转惯性飞轮来锻炼用户。用户致动的制动器在由用户致动后接合飞轮并使飞轮停止旋转。
10、美国专利no.7,918,766公开了一种用于提供椭圆足部运动的锻炼设备,该锻炼设备利用从设备框架的上部部分悬置的第一摇式连杆和第二摇式连杆,允许连杆的下部部分的至少受限的弧形运动。脚踏板组件连接到位于连杆的下部部分的旋转轴或构件,使得脚踏板将响应于在踏板上的用户的足部运动而描述大致的椭圆路径。
11、美国专利no.6,846,272公开了一种锻炼设备,该锻炼设备具有适于置放在地板上的框架、由框架支撑的枢转轴、第一踏板杆和第二踏板杆、固定到踏板杆的踏板,以及连接用于与踏板杆一起运动的臂把手,并且该锻炼设备可以利用各种踏板致动组件来产生踏板的椭圆运动。椭圆运动的跨步长度部分可以作为锻炼参数(例如速度)的函数而自动增加。此外,臂把手可以手动或自动地从踏板杆断开。
12、美国专利no.6,217,486公开了一种锻炼设备,该锻炼设备包括适于放置在地板上的框架、由框架支撑的枢转轴、弯曲踏板杆、固定到弯曲踏板杆的踏板以及各种踏板致动组件。这些踏板致动组件包括配合以提供椭圆路径并在踏板上提供期望的足部弯曲和重量分布的部件。因此,当踏板在其椭圆路径中移动时,踏板相对于固定的水平面(例如地板)的角度定向以模拟自然足跟到足尖的弯曲的方式变化。
13、美国专利no.6,203,474、no.6,099,439和no.5,947,872公开了一种锻炼设备,包括适于放置在地板上的框架、由框架支撑的枢转轴、具有第一端和第二端的踏板杆、固定到踏板杆的踏板、椭圆发电机和轨道。椭圆发电机固定到枢转轴并且固定到踏板杆的第一端,使得该踏板杆的第一端在围绕枢转轴的椭圆路径中移动。轨道固定到框架并接合该踏板杆的第二端,使得当踏板杆的第一端在围绕该枢转轴的椭圆路径中移动时,第二端在线性往复路径中移动。因此,踏板也在大致椭圆路径中移动。当踏板在其椭圆路径中移动时,踏板相对于固定的水平面(如地板)的角度定向以模拟自然足跟到足尖的弯曲的方式变化。
技术实现思路
1、提供本技术实现要素:是为了介绍在以下具体实施方式中进一步描述的一系列概念。本发明内容不旨在确定所要求保护的主题的关键特征或基本特征,也不旨在协助限制所要求保护的主题的范围。
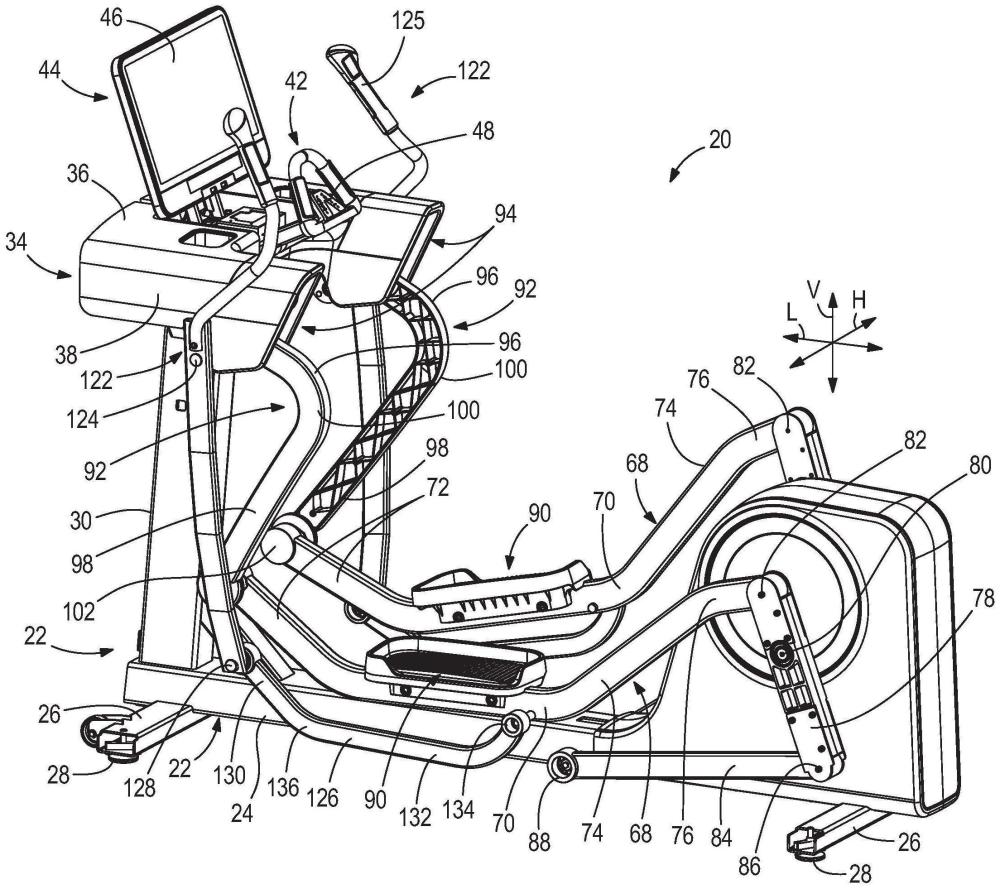
2、在本文公开的非限制性实施例中,锻炼机器用于进行跨步锻炼运动。锻炼机器包括框架、第一踏板构件和第二踏板构件、相应地在第一踏板构件和第二踏板构件上的第一脚垫和第二脚垫,以及第一摇臂和第二摇臂,其中第一脚垫和第一脚垫构造成在跨步锻炼运动期间在各自的椭圆路径中移动,其中第一踏板构件和第二踏板构件可枢转地联接到第一摇臂和第二摇臂并且与第一摇臂和第二摇臂一起相对于框架移动。调节装置将第一摇臂和第二摇臂可枢转地联接到框架。调节装置构造成主动地调节和设定第一摇臂和第二摇臂分别相对于框架的位置,从而在跨步锻炼运动期间分别改变椭圆路径的倾斜形状。
3、在本文公开的非限制性实施例中,锻炼机器还包括第一倾斜连杆和第二倾斜连杆,第一倾斜连杆和第二倾斜连杆将第一摇臂和第二摇臂可枢转地联接到框架。第一倾斜连杆和第二倾斜连杆中的每个在倾斜连杆-框架枢转轴线处可枢转地联接到框架,在倾斜连杆-摇臂枢转轴线处可枢转地联接到第一摇臂和第二摇臂中的相应一者,并且在致动器-倾斜连杆枢转轴线处可枢转地联接到调节装置。调节装置构造成使第一倾斜连杆和第二倾斜连杆相对于框架向后枢转,从而使倾斜连杆-摇臂枢转轴线相对于框架向后移动,从而提高椭圆路径的倾斜形状。调节装置还构造成使第一倾斜连杆和第二倾斜连杆相对于框架向前枢转,从而使倾斜连杆-摇臂枢转轴线相对于框架向前移动,从而降低椭圆路径的倾斜形状。在非限制性实施例中,调节装置包括第一线性致动器和第二线性致动器,第一线性致动器和第二线性致动器各自具有可枢转地联接到框架的第一端和可枢转地联接到第一倾斜连杆和第二倾斜连杆中的相应一者的第二端。
4、在本文公开的非限制性实例中,第一踏板构件和第二踏板构件各自具有前端部分,该前端部分在摇臂-踏板构件枢转轴线处可枢转地联接到第一摇臂和第二摇臂中的相应一者的下端部分,使得第一踏板构件和第二踏板构件中的每个相对于第一摇臂和第二摇臂中的所述相应一者可枢转地可移动并且相对于框架可枢转地可移动,并且使得第一摇臂和第二摇臂相对于框架的枢转导致第一踏板构件和第二踏板构件相对于框架的相当的枢转和平移。
5、在本文公开的非限制性实施例中,锻炼机器还包括第一把手构件和第二把手构件,第一把手构件和第二把手构件在相应的把手构件-桥接件枢转轴线处可枢转地联接到框架上的桥接件的相反侧。第一把手构件和第二把手构件中的每个都包括上端和下端,该上端提供用于由进行跨步锻炼运动的用户手动抓握的手柄,该下端在把手构件-联接连杆枢转轴线处可枢转地联接到相应的联接连杆,使得第一把手构件和第二把手构件以及联接连杆分别围绕相应的把手构件-桥接件枢转轴线枢转在一起。每个联接连杆具有在把手构件-联接连杆枢转轴线处联接到第一把手构件和第二把手构件中的相应一者的前端部分,以及在联接连杆-踏板构件枢转轴线处可枢转地联接到踏板构件的中心部分的向后端部分,使得每个联接连杆相对于踏板构件中的相应一者围绕联接连杆-踏板构件枢转轴线可枢转。
6、在本文公开的某些非限制性实施例中,第一踏板构件和第二踏板构件中的每个具有相应地可枢转地联接到第一摇臂和第二摇臂的前端,以及可枢转地联接到阻力装置的后端。第一曲柄臂和第二曲柄臂彼此径向相对,并且具有径向内端,该径向内端可旋转地固定到锻炼机器的后部的中心轴,该中心轴联接到阻力装置。第一步进连杆和第二步进连杆相应地可枢转地联接到第一曲柄臂和第二曲柄臂的径向外端,并且进一步地相应地可枢转地联接到第一踏板构件和第二踏板构件的尾部分。第一惰轮连杆和第二惰轮连杆具有第一端和第二端,该第一端在惰轮连杆-基座构件枢转轴线处可枢转地联接到框架的基座构件,该第二端在步进连杆-惰轮连杆枢转轴线处可枢转地联接到第一步进连杆和第二步进连杆中的相应一者的下端。
7、在本文公开的某些非限制性实施例中,调节装置包括致动器,该致动器构造成主动地调节和设定第一摇臂和第二摇臂分别相对于框架的位置,从而在跨步锻炼运动过程中分别改变椭圆路径的倾斜形状。在一些实施例中,致动器是第一线性致动器和第二线性致动器中的一者,该第一线性致动器和第二线性致动器具有第一端和相反的第二端,第一端联接到框架,第二端相应地可枢转地联接到第一摇臂和第二摇臂。致动器可以包括电动马达或液压活塞缸。在一些实施例中,致动器是线性致动器,其由具有用于支持线性致动器的延长和缩短的引导件的托架支撑。在一些实施例中,调节装置包括滑轮组件以及第一旋转装置和第二旋转装置,该第一旋转装置和第二旋转装置联接到滑轮组件且相应地联接到第一摇臂和第二摇臂。在这些示例中,致动器配置为在第一方向上旋转滑轮组件,以延长第一旋转装置和第二旋转装置,并且因此提高椭圆路径的倾斜形状,并且进一步地,致动器还配置为在相反的第二方向上旋转滑轮,以缩短第一旋转装置和第二旋转装置,并且因此降低椭圆路径的倾斜形状。在一些实施例中,调节装置包括齿轮连杆机构以及第一旋转装置和第二旋转装置,该第一旋转装置和第二旋转装置联接到齿轮连杆机构且相应地联接到第一摇臂和第二摇臂。在这些示例中,致动器配置为在第一方向上旋转齿轮连杆机构,从而延长第一旋转装置和第二旋转装置,并且因此提高椭圆路径的倾斜形状,并且进一步地,致动器还配置为在着相反的第二方向上旋转齿轮连杆机构,从而缩短第一旋转装置和第二旋转装置,并且因此降低椭圆路径的倾斜形状。
本文地址:https://www.jishuxx.com/zhuanli/20240615/78595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表