一种用于消防的喷洒无人机及其喷洒控制优化方法和系统
- 国知局
- 2024-07-05 16:53:34
本发明属于无人机消防,具体涉及一种用于消防的喷洒无人机及其喷洒控制优化方法和系统。
背景技术:
1、森林作为一种重要的自然资源,对我们的生存至关重要。但是不幸的是,我国以及全世界各个国家每年都有数万公顷的森林被大火摧毁,树木砍伐以及森林火灾甚至自然灾害造成的资源损失难以估计。近年来,无人机已由简易的飞行器成为具有多重功能的智能系统,并且已经广泛用于军事和民用领域。
2、无人机体小便携、飞行稳定、高精确定位、云台承载灵活多样等特点,可以承载遥感、红外、可见光、多光谱等系统的影像功能,其承载遥感影像完全不逊色于现有的卫星遥感影像系统。可及时、精准的反馈信息,并可严格按照预先设计的飞行航线、高度等要求无缝监测林区。其次,无人机场地的包容性高,重量和体积都很小,便于在环境复杂的林区起降。在森林调查中,一般工作环境在山区,对于需要滑跑和滑降的固定翼来说,难以找到适合的起降场地,在不满足情况下起飞容易对飞机造成较大损伤,而多旋翼和单旋翼可以垂直起降,不需要固定的起飞场地,对天气抗干扰性强,重量轻维护简单。
3、对于巡检无人机,由于无人机回传的森林图像信息复杂,人工观察漏检率高。因此,使无人机在复杂环境中快速准确的识别火焰,是实现巡检无人机实时自主监测的关键点与难点;对于灭火无人机,由于无人机飞行速度快,人工控制无人机操作难度大;森林环境复杂,难以获得完整的地图信息。因此,使无人机在环境信息不全的情况下,快速的确定森林起火的源头位置,精准地从无人机采集的图像中确定火焰发生位置,从而精准地提供无人机需要灭火的喷洒水量以及规划出无碰撞无被引火导致坠落的最优行进路径,是实现灭火无人机自主灭火的关键。
技术实现思路
1、本发明针对上述缺陷,提供一种用于消防的喷洒无人机及其喷洒控制优化方法和系统。本发明能够通过图像采集优化,进而精确确定森林起火源头以及多处火点所在位置,进而指导无人机精准地确定需要的喷洒水量并根据规划的路径最短最快地到达多处火源所在位置,既能保证灭火的同时达到避免浪费水资源,同时根据规划的最优行进路径可以无碰撞无被引火导致坠落的风险。
2、本发明提供如下技术方案:一种用于消防的喷洒无人机的喷洒控制优化方法,包括以下步骤:
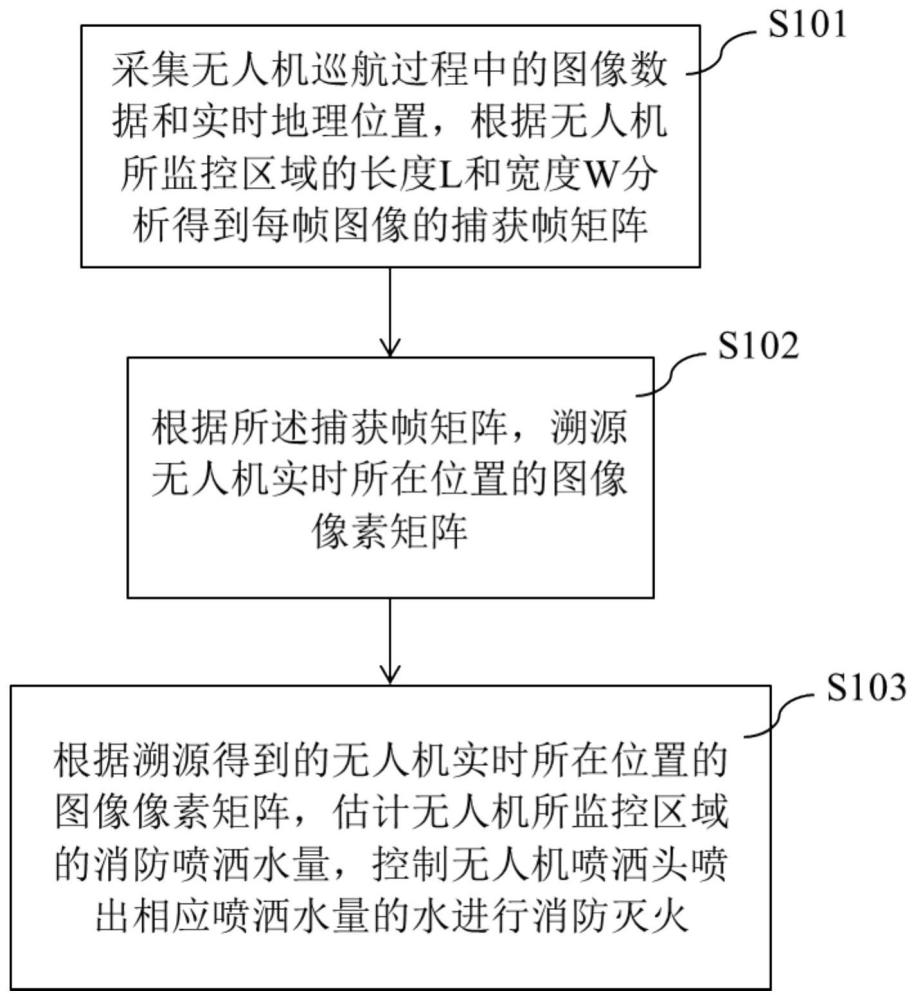
3、s101、采集无人机巡航过程中的图像数据和实时地理位置,根据无人机所监控区域的长度l和宽度w分析得到每帧图像的捕获帧矩阵;
4、s102、根据所述捕获帧矩阵,溯源无人机实时所在位置的图像像素矩阵;
5、s103、根据s102步骤溯源得到的无人机实时所在位置的图像像素矩阵,估计长度l和宽度w的无人机所监控区域的消防喷洒水量,控制无人机喷洒头喷出相应喷洒水量的水进行消防灭火。
6、进一步地,每个所述捕获帧矩阵由对应于蓝色可见光光谱和绿色可见光光谱以及经过去除绿色可见光光谱强度的近红外光谱强度nirt计算得到的gndvit光谱强度通道组成;
7、gt为采集到的实时绿色可见光光谱强度,bt为采集到的实时蓝色可见光光谱强度;sgndvit为t时刻从近红外光谱强度nirt中去除绿色可见光光谱强度gt计算得到的sgndvit光谱强度。
8、进一步地,所述步骤s101中得到的捕获帧矩阵f(xt,yt)如下:
9、
10、其中,xt=0,1,…,w―1,yt=0,1,…,l―1;xt为gprs定位模块实时定位的无人机所在地面的投影平面的x轴坐标,yt为gprs定位模块实时定位的无人机所在地面的投影平面的y轴坐标。
11、进一步地,所述s103步骤中溯源无人机实时所在位置的图像像素矩阵p(xt,yt)的计算公式如下:
12、
13、其中,为每个图像像素处理帧的平均系数。
14、进一步地,所述每个图像像素处理帧的平均系数的计算步骤如下:
15、s201、实时光谱采集及分析计算,输出t时刻的归一化差分植被指数ndvit;
16、s202、根据所述s201步骤采集并计算得到的归一化差分植被指数ndvit,计算所述捕获帧矩阵对应的图像数据中近红外光谱强度nirt;
17、s203、根据计算得到的所述近红外光谱强度nirt,计算t时刻从近红外光谱强度nirt中去除绿色可见光光谱强度计算得到的光谱强度gndvit;
18、s204、根据计算得到的光谱强度gndvit,计算每个图像像素处理帧的平均系数
19、
20、进一步地,所述s202步骤中计算捕获帧矩阵对应的图像数据中近红外光谱强度nirt的公式如下:
21、
22、其中,rt为采集到的实时红色可见光光谱强度。
23、进一步地,所述s203步骤计算所述光谱强度gndvit的公式如下:
24、
25、其中,gt为采集到的实时绿色可见光光谱强度。
26、本发明还提供采用如上所述方法的用于消防的喷洒无人机。
27、本发明还提供采用如上所述方法的用于消防的喷洒无人机控制优化系统,包括图像采集模块、greenseeker光谱传感器、gprs定位模块、中央分析控制模块;
28、所述图像采集模块,用于采集无人机巡航过程中的实时图像的红色可见光光谱强度、蓝色可见光光谱强度和绿色可见光光谱强度;
29、所述greenseeker光谱传感器,用于无人机巡航过程中实时采集并分析计算,输出t时刻的归一化差分植被指数ndvit;
30、所述gprs定位模块,用于实时定位无人机所在地面的投影平面的x轴坐标和y轴坐标;
31、所述中央分析控制模块,用于根据无人机所监控区域的长度l和宽度w分析每帧图像的捕获帧矩阵f(xt,yt),溯源无人机实时所在位置的图像像素矩阵,并估计长度l和宽度w的无人机所监控区域的消防喷洒水量,控制无人机喷洒头喷出相应喷洒水量的水进行消防灭火。
32、进一步地,所述图像采集模块为双目摄像机或红外摄像机。
33、本发明的有益效果为:
34、1、本发明提供的用于消防的喷洒无人机的喷洒控制优化方法,能够通过图像采集模块采集到无人机实时所在位点的捕获帧的每帧图像的蓝色可见光光谱和绿色可见光光谱以及经过从近红外光谱强度nirt中去除绿色可见光光谱强度的计算得到的gndvit光谱强度组成的捕获帧矩阵模型,通过去除绿色可见光光谱强度计算得到的gndvit光谱强度,本发明提供的捕获帧矩阵模型能够精准地定位森林火灾发生所在位置,并且计算gndvit光谱强度的近红外光谱nirt是通过greenseeker光谱传感器在无人机巡航过程中实时采集并分析计算,输出t时刻的归一化差分植被指数ndvit计算得到的,提高了计算的精确度。
35、2、本发明提供的方法基于视觉的森林火情监测系统取代了传统的人工监测和警报的方法,避免了人工遥控无人机巡检作业和肉眼检测难度高并且效果差,警报不及时以及误发警报,浪费火情扑灭资源的现象发生。
36、3、本发明提供的方法及系统和无人机能够在使用最少的水资源的情况下,针对图像采集并计算得到的火灾舆情范围,精确计算所需要的喷洒水量,并规划无人机的火灾扑灭路线后,有效提高火灾舆情发现的准确度和即使进行救灾、灭火工作的开展,并避免了无人机飞行过程中被火灾火焰引火后,还未到达救火位置就坠毁的现象发生。
37、4、本发明提供的火灾发生地,即火源所在位置目标检测的方法,通过图像采集模块进行目标检测,识别单帧图像中的物体类别并得出其位置信息,目标的位置用长度为l、宽度为w的矩形框将其标注出,应用深度学习的目标检测算法则设计神经网络结构,通过大量样本训练得出可以识别物体类别和位置信息的网络模型,无需手动提取特征分类,网络模型完全替代传统算法的预处理、提取特征和分类识别等复杂的步骤,避免了传统目标检测算法通过人工提取图像的信息特征并设计分类器进行特征对比得出物体类别和特征信息的计算精确度过低,容易发生警情误报的现象的发生。
本文地址:https://www.jishuxx.com/zhuanli/20240617/45064.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表