一种全地形垃圾回收车
- 国知局
- 2024-07-09 16:36:47
本技术涉垃圾回收,更具体地说,本技术涉及一种全地形垃圾回收车。
背景技术:
1、在现代化进程加速发展的情况下,城市的环卫建设是提高城市精神面貌的一个基础,城市街道、商圈和住宅小区,随处都设置有垃圾桶,以便于回收行人的随身垃圾,避免随地乱扔垃圾导致的环境破坏,一般的垃圾桶内的垃圾回收大都为环卫工人将垃圾回收至可移动的垃圾箱内,然后通过专用的垃圾回收车,将可移动垃圾箱内的垃圾倒入车内进行收集。
2、其中,经检索发现,专利申请号为cn201820857854.5的实用新型专利公开了一种垃圾回收车,包括车体、倾倒装置和冲洗装置;所述车体包括驾驶室和车厢,所述倾倒装置安装在所述车厢远离所述驾驶室的一侧,所述倾倒装置包括提升机构、固定机构和旋转机构,所述冲洗装置固定安装在所述车厢顶部,所述冲洗装置包括水箱,所述水箱设置有出水管,所述出水管远离所述水箱的一侧设置有喷嘴;
3、该结构在使用时,通过滤网进入垃圾回收箱,此时,垃圾箱内的液体会通过滤网进入液体回收箱,水箱内的水通过喷嘴可以对垃圾箱内部进行清理,将残留垃圾冲出,达到了清洗的目的,避免垃圾箱长时间使用导致的细菌滋生,产生异味,垃圾回收车内的垃圾也进行了初步的固液分离,有助于回收后的垃圾处理,但是在垃圾分类和回收方面,该结构在使用时,无法适用不同地形环境,造成该结构在使用时不够便捷。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供一种全地形垃圾回收车,旨在解决上述背景技术中提出的问题。
2、本实用新型是这样实现的,本实用新型提供如下技术方案:一种全地形垃圾回收车,包括用于支撑的车体,所述车体上设置有垃圾回收组件;
3、所述垃圾回收组件包括设置在车体的两个用于对垃圾存储的存储桶,且各所述存储桶的一侧分别设置有安装在车体上用于驱动存储桶旋转的第一电机;
4、所述车体远离存储桶的一端且位于车体的底部设置有用于隔挡的挡板,所述挡板的顶部设置有安装在车体上的机械臂,所述机械臂的一侧设置有主机;
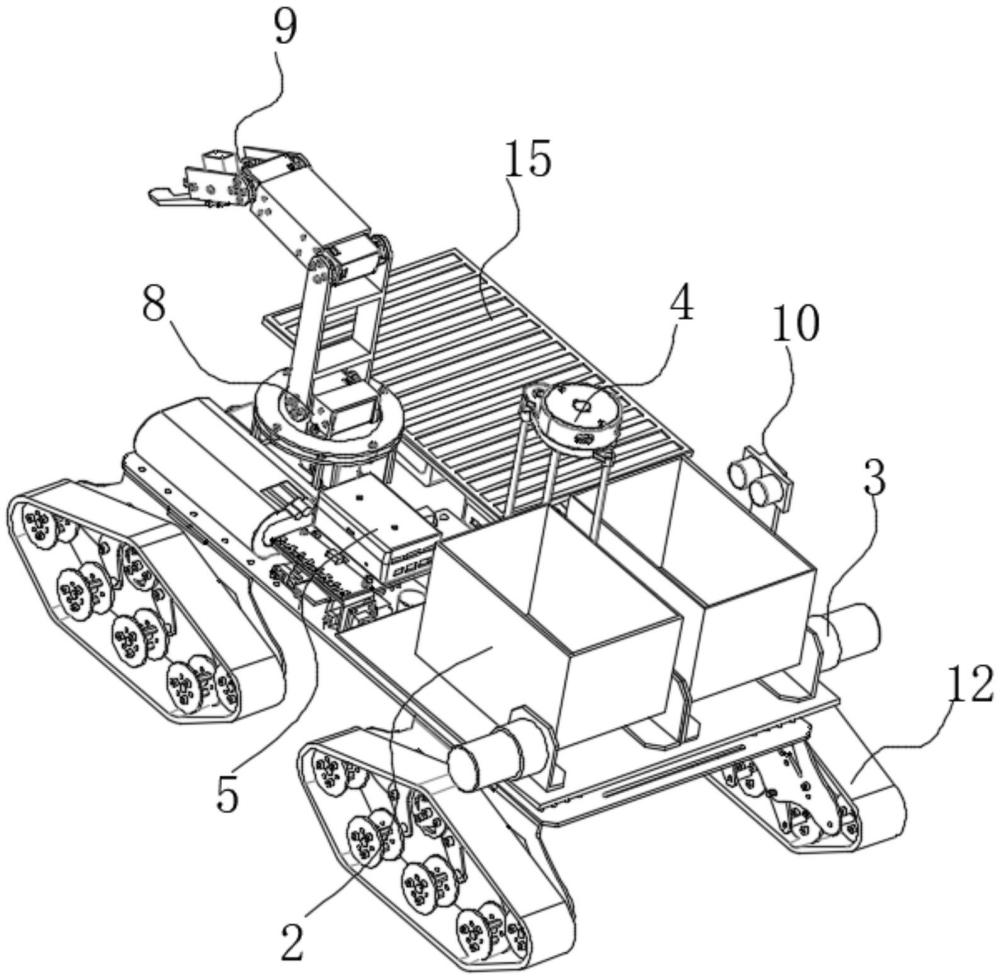
5、所述机械臂的一端设置有用于对垃圾进行拾取的夹爪,所述夹爪与机械臂可拆卸连接,两个所述存储桶之间设置有安装在车体上用于扫描周围地形环境的激光雷达传感器,所述车体的一端且位于挡板的顶部一侧设置有用于对垃圾进行特征识别的第一视觉摄像头,所述挡板的顶部设置有安装在车体上的第二视觉摄像头,两个所述存储桶其中一个的一侧设置有安装在车体上用于感应的超声波传感器,所述超声波传感器与存储桶的顶部处于同一平面上
6、可以看出,上述技术方案中,通过第一视觉摄像头和第二视觉摄像头对垃圾特征进行识别,经过主机处理后,通过机械臂驱动夹爪位移对垃圾进行拾取动作,并在拾取后放入各个存储桶中,通过存储桶顶部设置的超声波传感器,在超声波传感器检测到垃圾桶满载之后数据返回给主机,主机处理数据后控制第一电机驱动存储桶旋转进行存储桶的倾倒与复位工作,而激光雷达传感器的设置可以扫描周围地形根据控制板处理后形成地图,在遇到复杂路段或地形时规划安全路线。
7、可选的,在一种可能的实施方式中,所述车体的两侧分别设置有支撑板,且各所述支撑板上分别设置有履带,两个所述支撑板上分别设置有用于驱动履带旋转的第二电机,所述车体的顶部设置有太阳能板;
8、可以看出,上述技术方案中,第二电机驱动履带旋转带动装置位移,使得路面上的垃圾能够被挡板定位并聚拢在一起。
9、本实用新型的技术效果和优点:
10、通过设置垃圾回收组件,与现有技术相比,整体设计简单,结构合理,通过各个结构的相应配合使用,第二电机驱动履带旋转带动装置位移,使得路面上的垃圾能够被挡板定位并聚拢在一起;
11、通过机械臂驱动夹爪位移对垃圾进行拾取动作,并在拾取后放入各个存储桶中;
12、通过支撑板对履带进行支撑,便于装置在复杂地形中高效行进,提高越障能力和适应性。
技术特征:1.一种全地形垃圾回收车,包括用于支撑的车体(1),其特征在于:所述车体(1)上设置有垃圾回收组件;
2.根据权利要求1所述的一种全地形垃圾回收车,其特征在于:所述机械臂(8)的一端设置有用于对垃圾进行拾取的夹爪(9),所述夹爪(9)与机械臂(8)可拆卸连接。
3.根据权利要求1所述的一种全地形垃圾回收车,其特征在于:两个所述存储桶(2)之间设置有安装在车体(1)上用于扫描周围地形环境的激光雷达传感器(4)。
4.根据权利要求1所述的一种全地形垃圾回收车,其特征在于:所述车体(1)的一端且位于挡板(14)的顶部一侧设置有用于对垃圾进行特征识别的第一视觉摄像头(6),所述挡板(14)的顶部设置有安装在车体(1)上的第二视觉摄像头(7)。
5.根据权利要求1所述的一种全地形垃圾回收车,其特征在于:两个所述存储桶(2)其中一个的一侧设置有安装在车体(1)上用于感应的超声波传感器(10),所述超声波传感器(10)与存储桶(2)的顶部处于同一平面上。
6.根据权利要求1所述的一种全地形垃圾回收车,其特征在于:所述车体(1)的两侧分别设置有支撑板(11),且各所述支撑板(11)上分别设置有履带(12)。
7.根据权利要求6所述的一种全地形垃圾回收车,其特征在于:两个所述支撑板(11)上分别设置有用于驱动履带(12)旋转的第二电机(13),所述车体(1)的顶部设置有太阳能板(15)。
技术总结本技术公开了一种全地形垃圾回收车,具体涉及垃圾回收技术领域,包括用于支撑的车体,所述车体上设置有垃圾回收组件,所述垃圾回收组件包括设置在车体的两个用于对垃圾存储的存储桶。本技术通过设置垃圾回收组件,第二电机驱动履带旋转带动装置位移,使得路面上的垃圾能够被挡板定位并聚拢在一起,通过支撑板对履带进行支撑,便于装置在复杂地形中高效行进,提高越障能力和适应性。技术研发人员:张晗玉,李沅鸿,周韩臣,唐宏洲受保护的技术使用者:重庆移通学院技术研发日:20231017技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240617/53913.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表