工程机械及工程机械的控制方法与流程
- 国知局
- 2024-07-09 17:26:59
本发明涉及工程机械及工程机械的控制方法。
背景技术:
1、在道路工程、管道埋设工程等中大量使用挖掘机械。在市区等道路上使用的情况下,即使在导入了小型的挖掘机械的情况下,操作者也需要一边注意在侧方行驶的汽车、栅栏、护栏等障碍物,一边驾驶挖掘机械。
2、因此,例如在专利文献1中公开了为了限制挖掘机械的运动而设定虚拟墙。在专利文献1中,在回转体的前部、后部、左部及右部、以及倾斜方向的部分也配置物体检测传感器,检测挖掘机械的周围的障碍物,同时检测距挖掘机械的距离而设定虚拟墙。
3、现有技术文献
4、专利文献
5、专利文献1:国际公开第2019/189030号小册子
技术实现思路
1、但是,在专利文献1所示的构成中,由于需要遍及回转体的整周配置多个传感器,所以成本变高。
2、本公开的目的在于提供能够降低成本的工程机械及工程机械的控制方法。
3、(用于解决问题的技术方案)
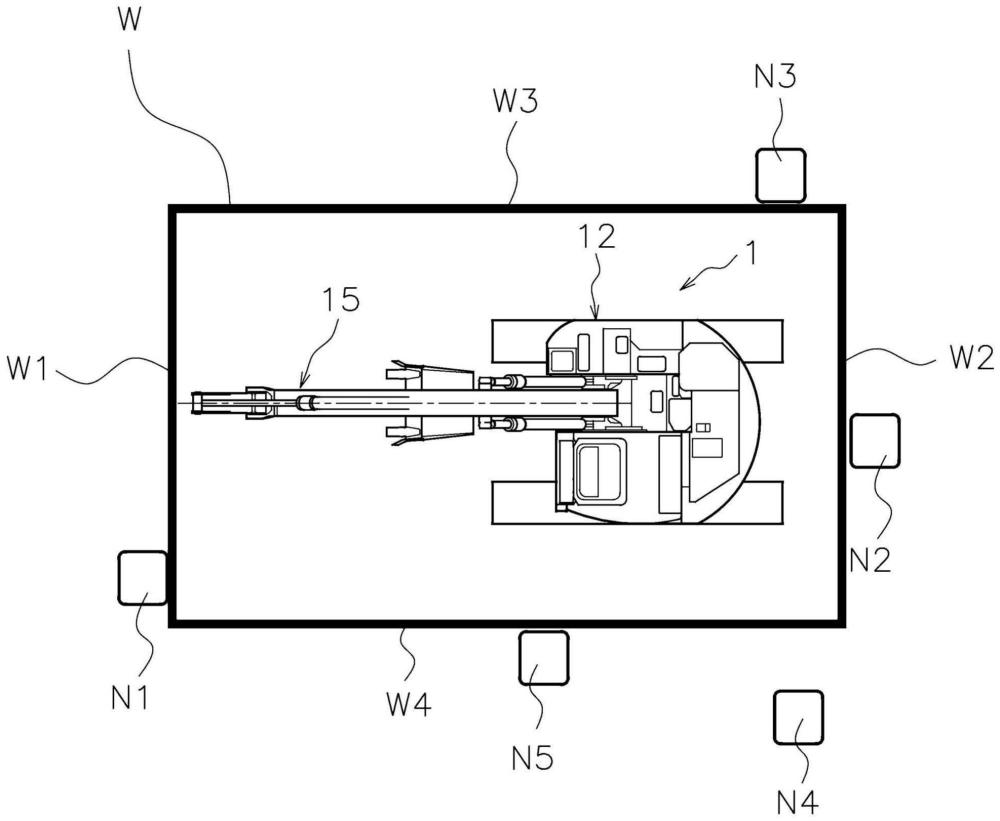
4、本公开一方面的工程机械具备工程机械主体、至少一个物体检测传感器、回转角度传感器、以及控制部。工程机械主体具有行驶体和回转体。回转体配置于行驶体的上侧,能够相对于行驶体进行回转。物体检测传感器配置于回转体上。回转角度传感器检测回转体的回转角度。控制部使回转体回转,由物体检测传感器检测工程机械主体的周围的物体,在检测到物体的情况下,基于由物体检测传感器检测到的从工程机械主体至物体的距离、和检测到物体的回转角度,特定物体相对于工程机械主体的位置,并基于特定的位置设定虚拟墙。
5、本发明另一方面的工程机械的控制方法具备检测步骤、位置特定步骤、以及设定步骤。检测步骤中,使配置于行驶体的上侧的回转体回转,检测包含行驶体及回转体的工程机械主体的周围的物体。位置特定步骤中,基于从工程机械主体至物体的距离、和检测到物体的回转角度,特定物体相对于工程机械主体的位置。设定步骤中,基于特定的位置设定虚拟墙。
6、(发明效果)
7、根据本公开的方面,能够提供可以降低成本的工程机械及工程机械的控制方法。
技术特征:1.一种工程机械,其特征在于,具备:
2.根据权利要求1所述的工程机械,其特征在于,
3.根据权利要求1所述的工程机械,其特征在于,
4.根据权利要求3所述的工程机械,其特征在于,
5.根据权利要求3所述的工程机械,其特征在于,
6.根据权利要求1所述的工程机械,其特征在于,
7.根据权利要求6所述的工程机械,其特征在于,
8.根据权利要求3所述的工程机械,其特征在于,
9.根据权利要求1~8中任一项所述的工程机械,其特征在于,
10.根据权利要求9所述的工程机械,其特征在于,
11.根据权利要求9所述的工程机械,其特征在于,
12.根据权利要求9所述的工程机械,其特征在于,
13.根据权利要求1~12中任一项所述的工程机械,其特征在于,
14.根据权利要求1所述的工程机械,其特征在于,
15.一种工程机械的控制方法,其特征在于,具备:
技术总结液压挖掘机(1)具备工程机械主体(2)、物体检测传感器(3a~3c)、回转角度传感器(61)、以及控制器(4)。工程机械主体(2)具有行驶体(11)和回转体(12)。回转体(12)配置于行驶体(11)的上侧,能够相对于行驶体(11)回转。物体检测传感器(3a~3c)配置于回转体(12)。回转角度传感器61检测回转体12的回转角度。控制器(4)使回转体(12)回转,由物体检测传感器(3a~3c)检测工程机械主体(2)的周围的物体,在检测到物体的情况下,基于由物体检测传感器(3a~3c)检测的从工程机械主体(2)至物体的距离、和检测到物体的回转角度,特定物体相对于工程机械主体(2)的位置,并基于特定的位置设定虚拟墙(W)。技术研发人员:冈岛一道受保护的技术使用者:株式会社小松制作所技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/58997.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。