一种直写曝光机镜头宏动标定装置的制作方法
- 国知局
- 2024-06-21 12:36:50
本技术涉及电子电路生产,特别涉及一种直写曝光机镜头宏动标定装置。
背景技术:
1、直写曝光机是电子电路领域中的一种关键设备,主要用于制造半导体器件,例如集成电路芯片(ic)和平板显示器(lcd、oled)等。直写曝光机的作用是将电子图案或设计图案精确地转移到半导体晶圆或显示器底片上,以创建电路图案、元件结构或显示器像素等微细结构。
2、直写曝光机的标定是确保曝光机在工作时能够精确地将掩膜上的图案投影到晶圆或底片上的一个重要过程。其中宏动标定是直写曝光机领域中的一个重要环节。宏动标定指的是对曝光机进行调整和校准,以确保其性能能够达到最佳状态。是确保曝光机能够精确地将图案投影到半导体晶圆或底片上的预先调节作业模式。
3、传统的宏动标定通常采用多自由度的线性模组(linear stage)构成,以执行必要的位置和姿态调整操作。这些线性模组提供了高精度、高稳定性的平动和旋转运动,用于校准直写曝光机的各个方面。这些线性模组通常由几个运动轴构成,包括x、y、z轴以及可能的旋转轴。每个轴都可以单独或协同运动,以实现位置和姿态的调整。这些模组通常由精密的线性导轨、螺杆传动、电动或气动驱动组件构成,以提供精确的控制和高负载承受能力。
4、(1)有限的自由度:传统线性模组通常提供有限的自由度,可能只包括x、y、z轴的运动,而缺少旋转自由度。这限制了其在某些应用中进行更复杂的标定和调整的能力。
5、(2)侧重于宏动调整:在宏动调整的大方向上,传统线性模组过于执行宏动调整,即粗略位置调整。对于宏动调整的大方向的微动调整基础上(微小的位置和角度调整),传统技术通常需要其他额外的装置或手动操作,这会增加标定的复杂性和时间成本。
6、(3)传统的线性模组通常采用叠加式布局,需要更多的空间,占用较大的地面面积。
7、为此,提出一种直写曝光机镜头宏动标定装置。
技术实现思路
1、有鉴于此,本实用新型实施例希望提供一种直写曝光机镜头宏动标定装置,以解决或缓解现有技术中存在的技术问题,即有限的自由度、侧重于宏动调整和需要更多的空间,并对此至少提供一种有益的选择;
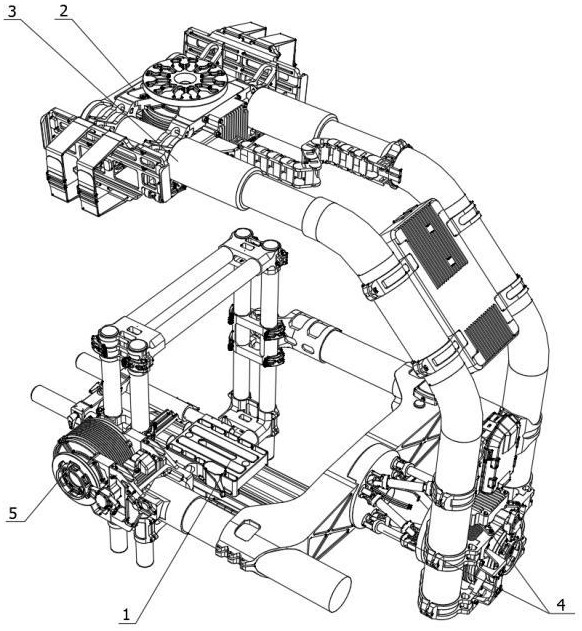
2、本实用新型实施例的技术方案是这样实现的:一种直写曝光机镜头宏动标定装置,包括用于搭载曝光机的曝光机搭载架,还包括第一标定机构;所述第一标定机构包括沿x轴向输出的第一线性自由度,所述第一线性自由度驱动并连接于第二标定机构;所述第二标定机构包括沿x轴向作为旋转轴的第一转动自由度,以及由至少三个第二线性自由度沿x轴环形阵列式排布而组成的万向自由度,所述第一转动自由度驱动于所述万向自由度的行程起始角度,所述万向自由度连接并作用于第三标定机构;
3、所述第三标定机构包括沿z轴向作为旋转轴的第二转动自由度,以及用于调节所述曝光机搭载架沿x轴向线性调节的第三线性自由度;所述第二转动自由度调节于所述第三线性自由度的行程起始点位;所述第一标定机构、所述第二标定机构和所述第三标定机构共同组成匚字形的布局,所述曝光机位于所述匚字形的中部镂空位置处。
4、在上述的实施方式中:这种直写曝光机镜头宏动标定装置主要包括曝光机搭载架、第一标定机构、第二标定机构和第三标定机构。曝光机搭载架用于安装曝光机。第一标定机构具有沿x轴方向的第一线性自由度,它被用来调整曝光机的位置,并连接到第二标定机构。第二标定机构包括一个以x轴为旋转轴的第一转动自由度,以及至少三个第二线性自由度,这些自由度以环形阵列式排布,形成一个万向自由度。第一转动自由度用于控制万向自由度的起始角度,而万向自由度连接并作用于第三标定机构。
5、其中在一种实施方式中:所述第一标定机构包括第一机架,所述第一机架上安装有用于输出所述第一线性自由度的第一伺服电缸,所述第一伺服电缸的活塞杆固设有厂字形架,所述厂字形架的竖向面上安装有所述第二标定机构。
6、在上述的实施方式中:第一标定机构包括第一机架,第一伺服电缸和厂字形架。第一机架是一个支架结构,上面安装有第一伺服电缸,该电缸负责输出第一线性自由度的运动。第一伺服电缸的活塞杆上固定有一个厂字形架,这个架子的竖向面上安装了第二标定机构。
7、其中在一种实施方式中:所述第二标定机构包括固设于所述厂字形架的竖向面上的、用于输出所述第一转动自由度的第一伺服电机,所述第一伺服电机驱动有用于输出所述万向自由度的并联组件并作x轴方向俯仰调节;所述并联组件搭载有所述第三标定机构,并构成所述匚字形的布局。
8、在上述的实施方式中:第二标定机构包括一个第一伺服电机,该电机被固设于厂字形架的竖向面上,并用于输出第一转动自由度的运动。第一伺服电机通过一个并联组件驱动第一转动自由度的调节,并实现x轴方向的俯仰调节。并联组件还搭载有第三标定机构,并构成匚字形的布局。
9、其中在一种实施方式中:所述并联组件包括两个盘体,其中一个所述盘体由所述第一伺服电机的输出轴固定连接,另一个所述盘体固设于第二机架,所述第二机架配合于所述第三标定机构;
10、两个所述盘体之间以环形阵列的形式布置有六个用于输出所述第二线性自由度的第二伺服电缸,所述第二伺服电缸的缸体和活塞杆之间分别均通过万向节联轴器万向铰接于两个所述盘体之间相互相对的各自一面上。
11、在上述的实施方式中:并联组件包括两个盘体,其中一个盘体固定连接到第一伺服电机的输出轴,而另一个盘体则固定在第二机架上,第二机架与第三标定机构配合工作。这两个盘体之间布置了六个第二伺服电缸,它们以环形阵列的方式排列,用于输出第二线性自由度的运动。每个第二伺服电缸的缸体和活塞杆之间通过万向节联轴器万向铰接到两个相对的盘体上。
12、其中在一种实施方式中:每两两相邻的两个所述第二伺服电缸相互之间呈v形或者倒v形排布。用于使得每个第二线性自由度交叠化,进而扩大线性自由度的行程量并增加控制精度。
13、在上述的实施方式中:每两个相邻的第二伺服电缸呈v形或倒v形排布,以实现第二线性自由度的交叠化。这种排布方式的目的是扩大线性自由度的行程量并增加控制精度。
14、其中在一种实施方式中:所述第三标定机构包括用于输出所述第二转动自由度的第二伺服电机,所述第二伺服电机固设于所述第二机架上,所述第二伺服电机的输出轴固设有第三机架,且所述第三机架铰接于所述第二机架,所述第三机架上搭载有用于输出所述第三线性自由度的第三伺服电缸;
15、在上述的实施方式中:第三标定机构包括第二伺服电机、第三机架和第三伺服电缸。第二伺服电机固定在第二机架上,用于输出第二转动自由度的运动。第二伺服电机的输出轴上固定有第三机架,而第三机架铰接在第二机架上。第三机架上搭载有用于输出第三线性自由度的第三伺服电缸。
16、其中在一种实施方式中:所述第三伺服电缸的缸体和活塞杆分别固设于所述第三机架和所述曝光机搭载架上。这种布置模式下,第一标定机构的第一伺服电缸作x轴向的宏动调节,第三标定机构的第三伺服电缸作微动调节。
17、在上述的实施方式中:第三伺服电缸的缸体和活塞杆分别固定在第三机架和曝光机搭载架上。这种布置模式下,第一标定机构的第一伺服电缸用于x轴向的宏动调节,而第三标定机构的第三伺服电缸则用于微动调节。
18、与现有技术相比,本实用新型的有益效果是:
19、(1)多自由度:本实用新型的技术采用匚形布局,包括多个标定机构,每个机构提供不同自由度的运动。这增加了自由度,允许在多个维度上进行高度精确的位置和角度调整。
20、(2)宏动和微动调整的平衡:在宏动调整的大方向基础上,通过采用宏动和微动调整的平衡,本实用新型的技术可以快速完成粗略的宏动调整,同时还能进行更精细的微动调整,从而满足各种标定和校准任务的需求。
21、(3)精确控制:多自由度和高级别的运动控制允许更精确的位置和角度控制,确保了高精度标定和调整。这对于需要高度精确性的任务非常重要。
22、(4)紧凑的布局:采用匚形布局的技术减小了所需的地面面积,通过更有效地利用空间,提高了空间的利用效率。这在有限的工作区域内进行复杂操作时非常有益。
本文地址:https://www.jishuxx.com/zhuanli/20240618/28189.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表