一种降低锅炉再热器左右汽温偏差模型优化控制方法及系统与流程
- 国知局
- 2024-08-01 02:37:51
本发明涉及一种模型优化控制方法及系统,尤其涉及一种降低锅炉再热器左右汽温偏差模型优化控制方法及系统,属于锅炉再热器运行优化控制。
背景技术:
1、目前在工业能量转换领域,切圆燃烧系统煤粉锅炉被广泛应用,其具有良好的燃料适应性、燃烧的稳定性、操作与调整的方便性,但是切圆燃烧方式存在的炉膛出口气流的残余旋转等固有问题,影响锅炉的优化运行,对于逆时针旋转的切圆燃烧锅炉,其上炉膛左侧烟室内烟气气流的运动机理比右侧复杂,运行过程中,左侧的气流存在气流衰减、滞止和反向加速的过程,其气流扰动强烈,而右侧的气流存在平稳地加速流向水平烟道的过程,由于左侧烟室内气流强扰动产生的对流强化效应,造成了上炉膛辐射受热面左侧吸热多于右侧,部分炉膛出口两侧烟温差高达100℃以上,会导致锅炉两侧出口再热器汽温偏差过大,发生再热器超温爆管事故,严重影响到锅炉的安全运行。
2、综上所述,为了保障锅炉稳定运行,一般对锅炉两侧出口再热器汽温进行预测,但传统的降低锅炉再热器左右汽温偏差模型优化控制系统及方法存在模型单一效果不好的问题,需要一种降低锅炉再热器左右汽温偏差模型优化控制方法及系统,能够满足自动生成预测模型、实时更新模型参数的需求。
技术实现思路
1、在下文中给出了关于本发明的简要概述,以便提供关于本发明的某些方面的基本理解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念,以此作为稍后论述的更详细描述的前序。
2、鉴于此,为解决现有技术中传统的降低锅炉再热器左右汽温偏差模型优化控制系统及方法存在模型单一效果不好的问题,本发明提供一种降低锅炉再热器左右汽温偏差模型优化控制方法及系统。
3、技术方案一如下:一种降低锅炉再热器左右汽温偏差模型优化控制方法,包括以下步骤:
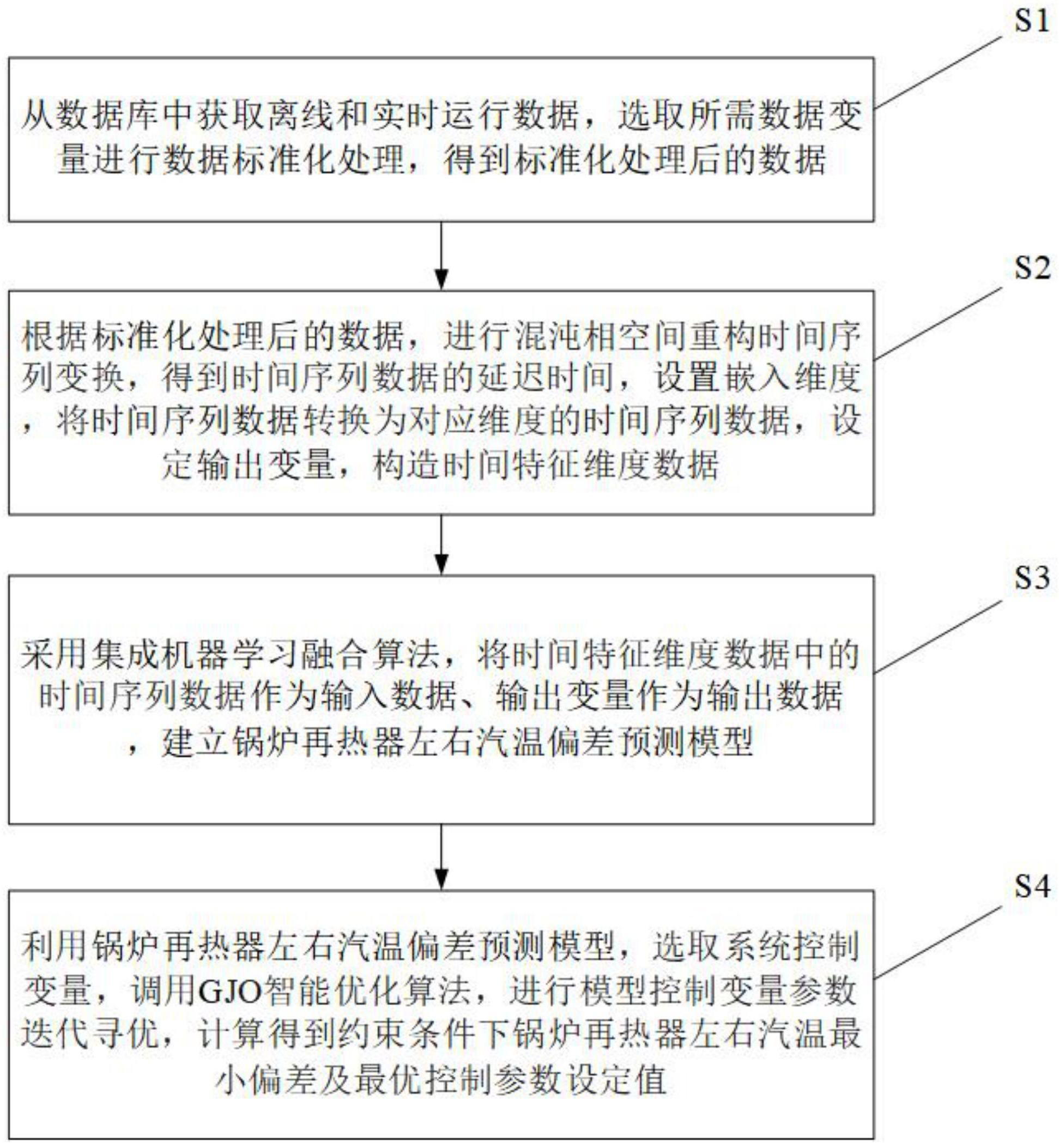
4、s1.从数据库中获取离线和实时运行数据,选取所需数据变量进行数据标准化处理,得到标准化处理后的数据;
5、s2.根据标准化处理后的数据,进行混沌相空间重构时间序列变换,得到时间序列数据的延迟时间,设置嵌入维度,将时间序列数据转换为对应维度的时间序列数据,构造时间特征维度数据;
6、s3.采用集成机器学习融合算法,将时间特征维度数据作为输入数据,建立锅炉再热器左右汽温偏差预测模型;
7、s4.利用锅炉再热器左右汽温偏差预测模型,选取系统控制变量,调用gjo智能优化算法,进行模型控制变量参数迭代寻优,计算得到约束条件下锅炉再热器左右汽温最小偏差及最优控制参数设定值。
8、进一步地,所述s1中,所需数据变量包括总燃料量、给煤机开度、二次风门开度、燃尽风开度、总空气量、氧量、磨煤机通风量、再热器入口温度、再热器事故减温水流量、再热器左侧减温水量、再热器右侧减温水量、再热器左侧出口温度、再热器右侧出口温度;
9、所述数据标准化处理中,采用上位机中数据处理模块对输入的所需数据变量中提取的样本数据x进行数据变换处理,得到数据变换处理后的样本数据x*;
10、数据变换处理后的样本数据x*表示为:
11、x*=log10(x+a)/log(max),a∈(1.6~1.8)
12、其中,a为偏移因子,max为样本数据x的最大值;
13、对数据变换处理后的样本数据x*使用box-cox变换方法进行数据转换,将其转换为均匀分布,得到标准化处理后的数据。
14、进一步地,所述s2中,时间序列数据的延迟时间为25秒,即第一个数据行与第二个数据行时间相差25秒,得到新的运行数据时间序列数据x1,将嵌入维度设置为150秒,将时间序列数据x1转换为6个维度的时间序列数据x2,将锅炉再热器左侧出口温度与再热器右侧出口温度比值的平方作为输出变量y,构造时间特征维度数据,得到时间序列数据x2[t0,t25,t50,t75,t100,t125]和输出变量y在150秒时的数据y[t150]。
15、进一步地,所述s3中,集成机器学习融合算法包括随机森林算法、极端随机树算法、lightgbm、xgboost提升树算法和catboost提升树算法,集成机器学习融合算法的参数选用五个模型的各自默认参数;
16、采用带打乱数据的重复7-折交叉bagging方法对集成机器学习融合算法的五个模型进行训练,采用7-折交叉验证方法对模型效果进行验证,将时间序列数据x2中前6块数据组作为数据集用于训练,最后一块数据组作为验证集用于验证评估模型好坏,依次更换验证集在数据集的位置,将多个模型输出的结果,与输入数据的特征串联起来,通过所述集成机器学习融合算法中的5种算法采用7-折交叉bagging进行堆叠建模,即stacking建模,将生成的五个模型的输出结果输入到一个线性模型里,对模型的输出做加权求和得到最终的预测输出模型结果h(x),即锅炉再热器左右汽温偏差预测模型;
17、预测输出模型结果h(x)表示为:
18、h(x)=a*f1(x)+b*f2(x)+c*f3(x)+d*f4(x)+e*f5(x)
19、其中,f1(x)为lightgbm算法模型的输出结果,f2(x)为随机森林算法模型的输出结果,f3(x)为极端随机树算法模型的输出结果,f4(x)为xgboost模型的输出结果,f5(x)为catboost模型的输出结果,a为lightgbm算法模型的加权系数,取值范围为0.1~0.2,b为随机森林算法模型的加权系数,取值范围为0.15~0.2,c为极端随机树算法模型的加权系数,取值范围为0.15~0.2,d为xgboost模型的加权系数,取值范围为0.1~0.2,e为catboost模型的加权系数,取值范围为0.15~0.2,且满足a+b+c+d+e=1。
20、进一步地,所述s4中,系统控制变量包括二次风门开度、燃尽风开度、氧量、再热器左侧减温水量、再热器右侧减温水量;
21、采用gjo智能优化算法对锅炉再热器左右汽温偏差预测模型控制参数进行优化求解,锅炉再热器左右汽温偏差预测模型对应gjo算法中的适应度函数,gjo优化算法包括搜索猎物、包围猎物和攻击猎物;
22、所述搜索猎物中,gjo算法对锅炉再热器左右汽温偏差预测模型采用初始化公式进行初始化;
23、初始化公式表示为:
24、y0=ymin+rand*(ymax-ymin)
25、其中,y0为初始金豺种群的位置,rand为[0,1]范围内的随机数,ymax和ymin取值为4和0;
26、在gjo算法中,猎物矩阵prey表示为:
27、
28、其中,yi,j为第i个猎物的第j维位置中第1和第2的胜者组成的豺狼对,n为猎物的数量,d为问题求解的维度;
29、在优化过程中,采用适应度函数估计每个猎物的适应度值,得到所有猎物的适应度值;
30、所有猎物的适应度值矩阵foa表示为:
31、
32、其中,f()为适应度函数,适应度函数的值最优的作为雄性豺狼,适应度值次优的作为雌性豺狼,豺狼对为得到相应猎物的位置;
33、搜索猎物公式表示为:
34、y1(t)=ym(t)-e·|ym(t)-rl·prey(t)|
35、y2(t)=yfm(t)-e·|yfm(t)-rl·prey(t)|
36、e=e1*e0
37、其中,t为当前迭代次数,prey(t)为第t次迭代的猎物的位置,ym(t)、yfm(t)分别为第t次迭代的雄性豺狼和雌性豺狼的位置,y1(t)和y2(t)分别为第t次迭代的与猎物相应的雄性豺狼和雌性豺狼更新后的位置,e为猎物的逃脱能量,e1为猎物能量的下降过程,e0为猎物能量的初始状态,在整个迭代过程中,e1的值从1.5线性减少到0,rl为一个基于莱维分布的随机数;
38、基于莱维分布的随机数rl表示为:
39、rl=0.05*lf(y)
40、其中,lf(y)为莱维飞行函数;
41、豺狼的位置更新公式表示为:
42、y(t+1)=(y1(t)+y2(t))/2
43、其中,y(t+1)为第t+1次迭代后的豺狼的位置;
44、所述攻击猎物中,当猎物被豺狼侵扰时,逃脱能量减少,豺狼对将在前一阶段检测到的猎物包围,当豺狼对将猎物包围后,攻击并吞食猎物,此过程可以表示为雄性和雌性豺狼一起捕猎的行为的数学模型;
45、雄性和雌性豺狼一起捕猎的行为的数学模型表示为:
46、y1(t)=ym(t)-e·|rl·ym(t)-prey(t)|
47、y2(t)=yfm(t)-e·|rl·yfm(t)-prey(t)|
48、当迭代终止后,在适应度函数的值达到最小时,锅炉再热器左右汽温偏差偏差最小,最优控制参数设定值为gjo算法豺狼对最终位置对应的参数值。
49、技术方案二如下:一种降低锅炉再热器左右汽温偏差模型优化控制系统,用于实现技术方案一所述的降低锅炉再热器左右汽温偏差模型优化控制方法,包括锅炉、现场数据采集器、数据接口、数据库、控制站和上位机;
50、所述锅炉与现场数据采集器和控制站分别相连;
51、所述现场数据采集器通过数据接口与控制站和数据库分别相连;
52、所述上位机与数据库和控制站分别相连,上位机包括数据处理模块、模型预测模块、优化模块和模型更新模块;
53、所述数据处理模块与模型预测模块和优化模块相连,模型更新模块与模型预测模块和优化模块分别相连。
54、本发明的有益效果如下:本发明通过将用于从数据库中采集关键变量进行标准化处理并构建时间特征维度数据的数据处理模块、用于建立锅炉再热器左右汽温偏差预测模型的模型预测模块、用于操作变量寻优并调节再热器左右汽温偏差的优化模块和用于按设定的时间间隔将实际的再热器左右汽温值与预测值相比较的模型更新模块进行有效组合连接;本发明实现了优化锅炉再热器左右汽温偏差模型并控制参数减小偏差值,模型输出的优化控制变量参数可以在控制站自动显示,电厂运行人员能够根据预测值和操作建议参数自行选择投入自动控制或手动控制进行调节;本发明所采用的算法运算简单,计算量小,模型训练时间快,适用于线性和非线性控制的情况,可以方便应用到工业控制的参数优化控制中。
本文地址:https://www.jishuxx.com/zhuanli/20240724/209374.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表