一种自动化动力吊卡装置及引扣方法与流程
- 国知局
- 2024-07-27 10:49:12
本发明涉及一种吊卡装置,尤其涉及一种自动化动力吊卡装置及引扣方法。
背景技术:
1、修井作业是油田最多的作业形式,有小修作业、大修作业之分,其中小修作业主要通过起、下完成作业任务,有检泵、换工艺、冲砂等主要作业。在石油修井时大多采用闭锁环式动力吊卡对油管进行上提、下放作业。传统的闭锁环式动力吊卡大多为手动操作,无法满足现代智能化修井作业的要求,且其闭锁效果差,体积较为笨重,极易引发安全事故。目前已采用智能化控制的闭锁环式动力吊卡,虽能满足现代智能化修井作业的要求,但此种动力吊卡无法确保其连接安装的稳定性,导致修井作业的安全性和便利性不佳。
2、在现有技术中主要存在以下问题,管柱引扣对中过程自动化程度低,二层台需要操作手操作;引扣作业过程中需要螺纹接头拧紧来保证抓取稳定,旋扣时间长;引扣作业过程中对中性差,无缓冲机构螺纹接头容易磕碰损坏;引扣作业过程传输效率低,工人一根油管引扣、上扣、下管完成后才能继续进行下一根油管的引扣作业。
技术实现思路
1、本发明的目的是提供一种自动化动力吊卡装置及引扣方法,以解决现有技术中自动化程度低、对中效果不佳、缺少缓冲结构使得螺纹接头容易损坏的问题。
2、本发明是采用以下技术方案实现的:一种自动化动力吊卡装置,其特征在于,包括动力吊卡,以及水平移动装置和竖直移动装置,所述水平移动装置设置在立柱上,所述动力吊卡与竖直移动装置连接,并由竖直移动装置控制动力吊卡竖直方向上的移动,所述竖直移动装置设置在水平移动装置上,并由水平移动装置带动竖直移动装置与动力吊卡移动。
3、进一步的,所述水平移动装置与竖直移动装置包括伸缩绞车,所述伸缩绞车水平设置,并通过自身伸缩实现水平移动,所述伸缩绞车通过钢丝吊钩连接动力吊卡,并通过绞车带动钢丝吊钩实现竖直移动;所述水平移动装置还包括对扣器滑轨,所述对扣器滑轨通过固定钢丝连接伸缩绞车,所述对扣器滑轨设置在滑轨支架上,并与之滑动配合,对扣器滑轨中间设置有对扣器,所述对扣器滑轨可以在滑轨支架上沿伸缩绞车伸缩方向移动,并且保证固定钢丝处于竖直状态;所述动力吊卡两侧设置有侧板,所述固定钢丝穿过动力吊卡两侧的侧板,保证动力吊卡、伸缩绞车、对扣器滑轨处于同一平面。
4、进一步的,所述动力吊卡包括吊卡框架、动力马达、联接器、吊卡主体、从动轴、胀扣套、导向轴,所述动力马达设置在吊卡框架内,所述吊卡框架下端连接有吊卡主体,所述联接器设置在吊卡主体内部,所述联接器一端连接动力马达输出轴,另一端连接从动轴,所述从动轴内过盈配合有导向轴,导向轴下端套设有胀扣套,所述胀扣套下端外表面设置有螺纹,所述胀扣套上端为非回转结构并位于从动轴与导向轴之间,通过动力马达驱动胀扣套旋转并通过螺纹抓取油管。
5、进一步的,所述联接器与从动轴之间可以沿轴线滑动,同时联接器与从动轴之间设置有缓冲弹簧,通过缓冲弹簧可以使从动轴相对吊卡主体沿轴向运动。
6、进一步的,所述导向轴下端设置有锥形凸块,所述锥形凸块与导向轴同轴设置,所述胀扣套卡在锥形凸块上,所述胀扣套为分割后的四瓣螺纹套。
7、进一步的,所述吊卡主体下端还设置有导向套,所述导向套下端设置有锥形导向部,所述胀扣套位于导向套内。
8、进一步的,所述对扣器滑轨上设置有多个感应摄像头。
9、进一步的,所述立柱下方设置有液压大钳。
10、一种自动化动力吊卡下管的引扣方法,包括以下步骤:
11、s1、当对扣器滑轨感应摄像头识别到猫道机械手夹持油管位置,与伸缩绞车和动力吊卡处于同一平面且自动停止运动,同步处于初始位置,此时对扣器处于油管正上方,猫道机械手抓取油管上升穿过对扣器停止,等待引扣抓取油管;
12、s2、伸缩绞车将动力吊卡下放,涨扣套在接触油管后,胀扣套螺纹与油管螺纹因动力吊卡重力作用更易上扣抓取,从动轴受反作用力上顶,缓冲弹簧受到挤压变形,吸收冲击力保护螺纹接头,动力马达自动输出引扣扭矩使胀扣套螺纹与油管螺纹旋合,无需旋紧,即完成油管抓取;
13、s3、抓取油管完成后,动力马达停止输出扭矩,伸缩绞车将动力吊卡提升,上升至油管尾端在对扣器内时停止,可以防止运输时油管晃动,此时胀扣套颈部弹性变形,外螺纹向外扩张实现胀扣,抓取油管更牢固;
14、s4、伸缩绞车伸缩杆开始收缩,对扣器滑轨同时依靠电力驱动开始滑动,对扣器滑轨、伸缩绞车、动力吊卡同步横向运送油管,当对扣器滑轨感应摄像头识别到液压大钳夹持油管位置,与伸缩绞车和动力吊卡自动同步停止运动,此时油管位于液压大钳夹持油管正上方;
15、s5、伸缩绞车将动力吊卡下放,油管对扣接触后吊卡下放自动停止,动力马达自动输出引扣扭矩完成油管预上扣,预上扣后液压大钳夹持油管进行上扣,完成油管最终上扣;
16、s6、液压大钳完成上扣后,伸缩绞车轻微上提,此时胀扣套不承受油管重力,颈部弹性变形恢复,动力马达自动反转输出扭矩,释放油管;
17、s7、动力吊卡提升,与伸缩绞车和动力吊卡同步运动到初始位置,猫道完成油管传输,猫道机械手将油管提升,进行下一次下管的引扣传输作业。
18、一种自动化动力吊卡起管的引扣方法,包括以下步骤:
19、s1、当对扣器滑轨感应摄像头识别到液压大钳夹持油管位置,与伸缩绞车和动力吊卡停止运动,同步处于油管上方初始位置,液压大钳对起升后的油管进行卸扣;
20、s2、伸缩绞车将动力吊卡下放,涨扣套在接触油管后,动力马达输出引扣扭矩完成油管抓取;
21、s3、抓取油管完成,伸缩绞车将动力吊卡提升,油管尾端在对扣器内时停止,防止运动时油管晃动,此时胀扣套弹性变形实现胀扣,抓取更牢固,伸缩绞车、动力吊卡、对扣器滑轨同步运送油管;
22、s4、当对扣器滑轨感应摄像头识别到猫道机械手夹持油管位置,与伸缩绞车和动力吊卡同步停止运动,此时位于猫道机械手正上方;
23、s5、伸缩绞车将动力吊卡下放,猫道机械手夹持油管,动力马达自动反转输出扭矩,释放油管;
24、s6、猫道机械手下行传输油管,动力吊卡提升,与伸缩绞车和动力吊卡同步运动到初始位置,进行下一次起管的引扣传输作业。
25、本发明的有益效果在于:1吊卡引扣作业,实现了油管引扣传输过程的自动化作业,过程实现无人化,明显降低人员风险,提高带压作业的安全性;2胀扣套在引扣过程中产生胀扣使抓取更加稳定,无需较大的上扣扭矩即可完成油管抓取;3;吊卡引扣与上扣过程中实现稳定对中且具有缓冲结构,防止螺纹接头损坏;4提高了带压作业油管引扣到油管上扣的传输效率,一根油管在液压大钳上扣的同时,下一根油管继续用吊卡引扣传输,节省传输空档时间,创造更大的经济效益。
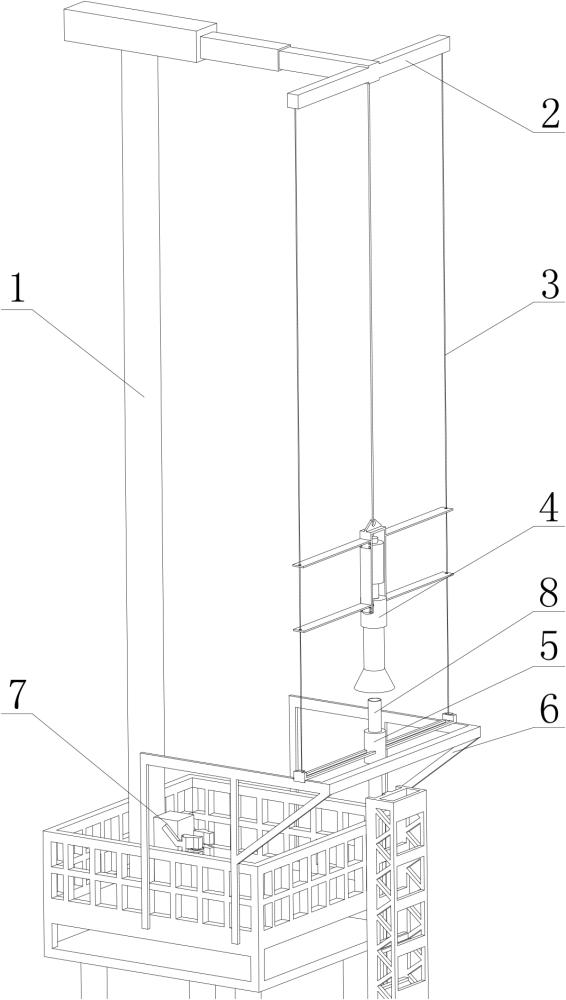
技术特征:1.一种自动化动力吊卡装置,其特征在于,包括动力吊卡(4),以及水平移动装置和竖直移动装置,所述水平移动装置设置在立柱(1)上,所述动力吊卡(4)与竖直移动装置连接,并由竖直移动装置控制动力吊卡(4)竖直方向上的移动,所述竖直移动装置设置在水平移动装置上,并由水平移动装置带动竖直移动装置与动力吊卡(4)移动。
2.根据权利要求1所述的一种自动化动力吊卡装置,其特征在于,所述水平移动装置与竖直移动装置包括伸缩绞车(2),所述伸缩绞车(2)水平设置,并通过自身伸缩实现水平移动,所述伸缩绞车(2)通过钢丝吊钩连接动力吊卡(4),并通过绞车带动钢丝吊钩实现竖直移动;所述水平移动装置还包括对扣器滑轨(5),所述对扣器滑轨(5)通过固定钢丝(3)连接伸缩绞车(2),所述对扣器滑轨(5)设置在滑轨支架(6)上,并与之滑动配合,对扣器滑轨(5)中间设置有对扣器,所述对扣器滑轨(5)可以在滑轨支架(6)上沿伸缩绞车(2)伸缩方向移动,并且保证固定钢丝(3)处于竖直状态;所述动力吊卡(4)两侧设置有侧板,所述固定钢丝(3)穿过动力吊卡(4)两侧的侧板,保证动力吊卡(4)、伸缩绞车(2)、对扣器滑轨(5)处于同一平面。
3.根据权利要求1所述的一种自动化动力吊卡装置,其特征在于,所述动力吊卡(4)包括吊卡框架(401)、动力马达(402)、联接器(403)、吊卡主体(404)、从动轴(406)、胀扣套(407)、导向轴(408),所述动力马达(402)设置在吊卡框架(401)内,所述吊卡框架(401)下端连接有吊卡主体(404),所述联接器(403)设置在吊卡主体(404)内部,所述联接器(403)一端连接动力马达(402)输出轴,另一端连接从动轴(406),所述从动轴(406)内过盈配合有导向轴(408),导向轴(408)下端套设有胀扣套(407),所述胀扣套(407)下端外表面设置有螺纹,所述胀扣套(407)上端为非回转结构并位于从动轴(406)与导向轴(408)之间,通过动力马达(402)驱动胀扣套(407)旋转并通过螺纹抓取油管(8)。
4.根据权利要求3所述的一种自动化动力吊卡装置,其特征在于,所述联接器(403)与从动轴(406)之间可以沿轴线滑动,同时联接器(403)与从动轴(406)之间设置有缓冲弹簧(405),通过缓冲弹簧(405)可以使从动轴(406)相对吊卡主体(404)沿轴向运动。
5.根据权利要求3所述的一种自动化动力吊卡装置,其特征在于,所述导向轴(408)下端设置有锥形凸块,所述锥形凸块与导向轴(408)同轴设置,所述胀扣套(407)卡在锥形凸块上,所述胀扣套(407)为分割后的四瓣螺纹套。
6.根据权利要求3所述的一种自动化动力吊卡装置,其特征在于,所述吊卡主体(404)下端还设置有导向套(409),所述导向套(409)下端设置有锥形导向部,所述胀扣套(407)位于导向套(409)内。
7.根据权利要求2所述的一种自动化动力吊卡装置,其特征在于,所述对扣器滑轨(5)上设置有多个感应摄像头。
8.根据权利要求1所述的一种自动化动力吊卡装置,其特征在于,所述立柱(1)下方设置有液压大钳(7)。
9.一种自动化动力吊卡下管的引扣方法,基于权利要求1-8所述的一种自动化动力吊卡装置实现,其特征在于,包括以下步骤:
10.一种自动化动力吊卡起管的引扣方法,基于权利要求1-8所述的一种自动化动力吊卡装置实现,其特征在于,包括以下步骤:
技术总结本发明公开了一种自动化动力吊卡装置及引扣方法,其特征在于,包括动力吊卡,以及水平移动装置和竖直移动装置,所述水平移动装置设置在立柱上,所述动力吊卡与竖直移动装置连接,并由竖直移动装置控制动力吊卡竖直方向上的移动,所述竖直移动装置设置在水平移动装置上,并由水平移动装置带动竖直移动装置与动力吊卡移动。实现了油管引扣传输过程的自动化作业,过程实现无人化,明显降低人员风险,提高带压作业的安全性;胀扣套在引扣过程中产生胀扣使抓取更加稳定,无需较大的上扣扭矩即可完成油管抓取;吊卡引扣与上扣过程中实现稳定对中且具有缓冲结构,防止螺纹接头损坏。技术研发人员:罗伟,陈智,周长林,王利,黄建,赖宁,任思龙,杨磊,王柯,向锋,蔡道钢,鲁大勇,文晚受保护的技术使用者:四川圣诺油气工程技术服务有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240726/115783.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表