一种风力发电机变桨系统传感器容错控制系统及方法
- 国知局
- 2024-07-27 13:27:44
本发明属于风力发电机,具体涉及一种风力发电机变桨系统传感器容错控制系统及方法。
背景技术:
1、风能作为主要的可再生能源之一,在过去数十年间获得了广泛关注和巨大发展。然而,风电机组大多安装在高山、沙漠或沿海等气候多变、条件恶劣的环境中,受水汽腐蚀、风沙侵袭、覆冰、雷击及昼夜温差等影响,加之随机风速带来的运行工况多变和长期运行后的部件疲劳等问题,使得变桨系统成为故障率最高的部件之一。变桨系统故障常需要数小时乃至数天的停机维护时间,造成难以挽回的损失。此外,伴随着我国风电行业的高速发展,早期安装的风电系统寿命将逐步逼近设计年限,设备的故障率和运行维护费用也变得越来越高。同时,当前风电机组正在趋向于大型化、复杂化,使得维保难度和维保成本又急剧攀升。因此,在设计时对风电机组运行的安全性和可靠性提出了更高的要求,一旦发生故障必须及时发现解决,并且要求系统能够带故障容错运行。
2、基于此,本发明公开了一种风力发电机变桨系统传感器容错控制系统及方法。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明的目的在于提供一种风力发电机变桨系统传感器容错控制系统及方法。
2、为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
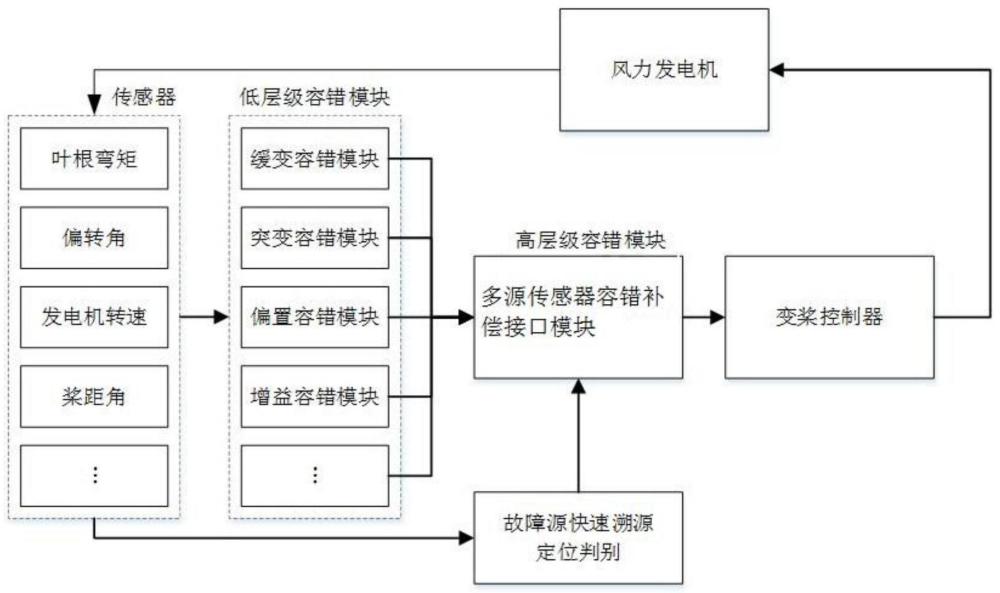
3、一种风力发电机变桨系统传感器容错控制系统,包括变桨控制器、故障源快速溯源定位判别模块p(x)、低层级容错模块f(x)和高层级容错模块,所述低层级容错模块f(x)和故障源快速溯源定位判别模块p(x)分别与高层级容错模块输入端相连,所述高层级容错模块输出端与变桨控制器相连,通过变桨控制器完成变桨控制的比较与计算,将得到的正确的变桨信息传递给风力发电机,驱动风力发电机变桨,完成变桨系统容错控制。
4、本发明还公开了一种风力发电机变桨系统传感器容错控制方法,包括以下步骤:
5、步骤一:实时采集风力发电机的传感器信息;
6、步骤二:将传感器信息传递给故障源快速溯源定位判别模块,实时对故障发生的部位进行快速判别定位;
7、步骤三:将传感器信息传递给故障源快速溯源定位判别模块的同时,还要将传感器信息传递给低层级容错模块f(x)进行容错补偿;
8、步骤四:经过步骤三低层级容错补偿后的传感器信息传递给多源传感器容错补偿接口模块进行处理,隐藏故障影响,再将信息提供给变桨控制器,完成故障容错;
9、步骤五:变桨控制器根据步骤四提供的传感器信息,完成变桨控制的比较与计算,将得到的正确的变桨信息传递给风力发电机,驱动风力发电机变桨,完成变桨系统容错控制。
10、进一步的,所述传感器信息包括叶根弯矩x1、偏转角x2、发电机转速x3和桨距角x4,由向量x表示。
11、进一步的,步骤二中,所述故障源快速溯源定位判别模块利用机器学习的多层前馈神经网络进行快速判别定位,包括如下步骤:
12、1)初始化工作:确定样本集为(x,y),其中x为输入向量,y为理想输出向量;设置初始权系数w=(wij),其为较小的随机非零值;
13、2)向前传播阶段:
14、21)从样本集中取一个第p组样本(xp,yp),将xp输入网络;
15、22)计算相应的实际输出op;
16、3)向后传播阶段:
17、31)计算实际输出与相应期望输出的差yp(k)-op(k);
18、32)按极小化误差的方式调整权矩阵;
19、4)反复学习训练过程:
20、上述步骤2)-3)两个阶段的工作,应受到精度要求的控制;网络关于第p个样本的误差测度为:
21、
22、式中,opj(k)为神经元j在k时刻的实际输出,ypj(k)表示相应的期望输出;
23、网络关于整个样本集的误差测度定义为e=∑ep;
24、5)误差传播:
25、51)调整输出层权wpq;
26、52)调整隐含层权vhp。
27、进一步的,步骤22)中,实际输出op的计算公式为:
28、op=fn(…(f2(f1(xpw(1))w(2))…)w(n))。
29、进一步的,步骤51)中,输出层权wpq的调整步骤包括:
30、设anq表示第n层输出层的第q个神经元,wpq为从其前导层的第p个神经元anp到anq的连接权,则输出层权值调整公式为:
31、wpq=wpq+δwpq
32、若采用delta规则进行权重误差修正,则有:
33、δwpq=ηδqop
34、式中,η为学习速率,op为神经元anq的输入,也即神经元anp的实际输出,δq=f′(netq)(yq-oq),oq为输出层神经元anq的实际输出,yq为输出层神经元anq的期望输出。
35、进一步的,步骤52)中,隐含层权vhp的调整步骤包括:
36、设wp1,wp2,…,wpm为已知第k层输出层的权值;
37、令δp(k-1)=f′k-1(netp)(wp1δ1k+wp2δ2k+...+wpmδmk),从而有:
38、δvhp=ηδp(k-1)oh(k-2)
39、=ηf′k-1(netp)(wp1δ1k+wp2δ2k+…+wpmδmk)oh(k-2)
40、=ηop(k-1)(1-op(k-1))(wp1δ1k+wp2δ2k+…+wpmδmk)oh(k-2)
41、式中,oh为神经元anp的输入,也即神经元anh的实际输出;
42、从而得到隐含层权的调整公式为:
43、vhp=vhp+δvhp。
44、进一步的,所述低层级容错模块f(x)表示为:
45、
46、式中,xt和xt-1分别为当前时刻传感数据和上一时刻传感数据,a,b,c,d分别为故障补偿因子,其中a随时间t变化。
47、进一步的,所述低层级容错模块包括缓变容错模块f1(x)、突变容错模块f2(x)、偏置容错模块f3(x)和增益容错模块f4(x),所述缓变容错模块针对缓变类故障进行容错补偿,所述突变容错模块针对突变类故障进行容错补偿,所述偏置容错模块针对偏置类故障进行容错补偿,所述增益容错模块针对增益类故障进行容错补偿。
48、进一步的,步骤四包括以下步骤:对故障传感信息xf归一化处理,并保留归一化参数,得到归一化值x'f;此时,由故障源快速溯源定位判别模块得到具体的传感器故障类型和位置,根据类型和位置从低层级容错模块中选择对应的容错模块;将归一化值x'f给到f(x),经过计算得到补偿后的值x't,再反归一化得到正确的传感器信息xt;最后根据实际控制误差e,在线调整对应的故障容错补偿子模块中的a,b,c,d值,保证故障补偿能够实时优化。
49、与现有技术相比,本发明的有益效果为:
50、本发明公开了一种风力发电机变桨系统传感器容错控制系统及方法,该方法包括以下步骤:步骤一:实时采集风力发电机的传感器信息;步骤二:将传感器信息传递给故障源快速溯源定位判别模块,实时对故障发生的部位进行快速判别定位;步骤三:将传感器信息传递给故障源快速溯源定位判别模块的同时,还要将传感器信息传递给低层级容错模块f(x)进行容错补偿;步骤四:经过步骤三低层级容错补偿后的传感器信息传递给多源传感器容错补偿接口模块进行处理,隐藏故障影响,再将信息提供给变桨控制器,完成故障容错;步骤五:变桨控制器根据步骤四提供的传感器信息,完成变桨控制的比较与计算,将得到的正确的变桨信息传递给风力发电机,驱动风力发电机变桨,完成变桨系统容错控制。本发明提供的风力发电机变桨系统传感器容错控制系统及方法,用于应对风力发电机变桨系统传感器故障事件,用于在变桨系统传感器故障时实现故障检测与隔离,进而实现容错控制,可应对设备故障等突发状况,可确保变桨系统在传感器故障条件下仍能可靠运行,大大提升系统鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240726/126210.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表