一种风电场短期风速预测方法与流程
- 国知局
- 2024-07-31 22:42:30
本发明涉及风电场短期风速预测,具体涉及一种风电场短期风速预测方法。
背景技术:
1、由于风电出力受环境与气候等因素交互影响,随机性较强的风速将导致风电场输出功率存在显著波动性,为电力系统经济调度与安全稳定运行带来了巨大挑战,亟需对其输入风速进行精确预测。风电系统的随机性变量以风速为代表,其随时间变化的规律呈现出显著的复杂度,单依靠风速时间上的长短期依赖关系难以实现精准的确定性预测,往往需要结合时空相关特征、数值天气预报等具体信息来改善预测精度。
2、现有的风速预测方法主要包括物理方法、数学方法、人工智能方法等,目前,基于人工智能的风速预测方法是研究热点之一,其中常用的方法主要包括:核岭回归、支持向量回归、递归神经网络等,另有基于机器学习融合模型的预测方法。然而,这类方法营造风速时序内特征提取环境,仅捕捉到风速的时间依赖,而未能考虑到风电场内部的时空相关性。
3、在时空相关性的挖掘方面,现有技术通过风场内多元变量的收集,获取风电场时空非线性数据,搭建时空神经网络,提炼风电系统内时空依赖关系,从而改善预测精度。也有相关技术主要通过在计及风电时空特性后融入了元启发仿生优化,强化了模型对风电时空变量的预测能力。现有技术同样利用风速的时空相关特性,按照“离线分类优化,在线选配模型”的思路展开预测,并因此取得了良好效果。然而,上述技术的着眼点在于风电序列的时空相关性,却未能与序列自身波动特性紧密结合。
4、在序列波动性与时空相关性二者的结合方面,有发明曾提出一种基于概率分布联合训练时空自编码器的同调发电机在线识别方法,其基于深度学习自编码器(auto-encoder,ae)思想,设计并搭建时空神经网络,将特征提取层及任务驱动层联合训练,挖掘发电机功角的内部剧烈波动特性及时空相关性,并以可视化方式阐释序列高维特征,得到了可解释性更强的框架。该方法具备较高可靠性,同时无需离线标注大量数据,在无监督时序聚类任务上表现突出。然而,上述的联合训练方式却在自回归任务上表现一般,原因在于:模型在无监督与自监督训练模式下,其特征空间更倾向于无监督任务的表达方式,而与有监督大相径庭。例如:能够使分类器取得良好分类结果的编码向量始终无法较好的被ae重构为原始数据,重构性能良好的特征向量与上述向量之间的差异很大。
5、以上方法多计及时空相关、时序依赖,兼顾模型优化,却未能考虑到风电系统前后向动力学趋势与非线性系统数据内部的物理结构,也未能考虑时间可逆性的影响。因此,针对上述提及的问题,有必要研究改进风电场短期风速预测方法,以更好地对输入风速进行精确预测的目的。
技术实现思路
1、针对现有技术的不足,本发明提出一种风电场短期风速预测方法,可以提高风速预测精度。
2、本发明公开了一种风电场短期风速预测方法,所述方法包括:
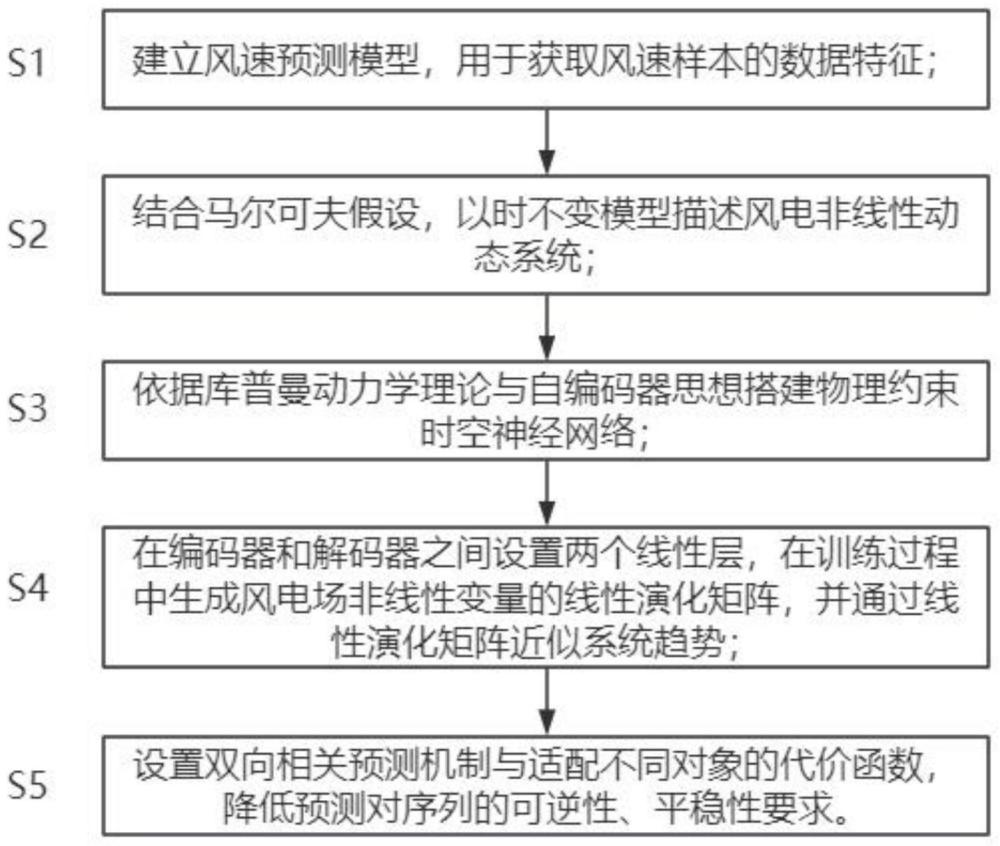
3、s1:建立风速预测模型,用于获取风速样本的数据特征;
4、s2:结合马尔可夫假设风电非线性动态系统以时不变模型进行建模;
5、s3:依据库普曼动力学理论与自编码器思想搭建物理约束时空神经网络;
6、s4:在编码器和解码器之间设置两个线性层,在训练过程中生成风电场非线性变量的线性演化矩阵,并通过线性演化矩阵近似系统趋势;
7、s5:设置双向相关预测机制与适配不同对象的代价函数,降低预测对序列的可逆性、平稳性要求。
8、在一个可选的实施例中,s1包括,
9、s101:将风速样本映射到n维空间,基于自编码器深度神经网络进行强随机性数据特征的挖掘;
10、s102:在风场的多元非线性数据驱动下,通过库普曼理论,解决双向预测自回归的任务驱动问题;
11、s103:建立潜在变量与动力系统一致性之间的联系,结合风电场内非线性数据的前向与后向映射,同时设计匹配不同预测任务的代价函数组合;
12、s104:采取自编码器同时生成前、后向两种类库普曼算子,并对二者加以相关性约束;
13、s105:将风速预测层、两个库普曼算子的线性近似层与自编码器的特征提取层联合训练;
14、s106:设计并搭建由卷积神经网络与门控循环单元组成的时空神经网络特征提取层,从时空两层面挖掘风电场非线性数据内部的依赖特征。
15、在一个可选的实施例中,所述自编码器深度神经网络包括编码器、译码器,以及两个并列的线性层,
16、所述编码器包括:一维卷积神经网络和一层门控循环单元神经网络;
17、所述译码器包括:一维反卷积神经网络和一层门控循环单元神经网络;
18、所述线性层包括线性层a和线性层b,其中,所述线性层a拟合用于正向预测任务的库普曼算子,所述线性层b拟合用于逆向预测任务的库普曼算子。
19、在一个可选的实施例中,s2包括,
20、s201:时不变模型描述为:其中,zk表示风电场非线性变量在k时刻的状态,映射表示潜在非线性变量的更新规则,其中,变量在时间k+1的状态仅依赖于时间k状态,而不依赖于先前时刻;
21、s202:引入动力学后拉算子通过公式:展示变化趋势,其中,标量函数f(·)充满映射算子能够通过后拉f(·)数值来展示其变化趋势;
22、s203:在s202的基础上,通过公式:
23、
24、深化展示变化趋势;
25、s204:计算算子的有限维近似,公式为:引入前拉算子uψ,公式为:再利用经推导后的关系展开预测,公式为:
26、
27、
28、其中,χ为变换,χ-1为χ的共轭。
29、在一个可选的实施例中,在训练过程中,通过公式
30、
31、
32、对模型加以时间的前后向一致性约束,在前向与后向的一致性约束下,将编码器的编码运算作为变换χ,以解码器的译码运算作为变换χ-1。
33、在一个可选的实施例中,定义原始非线性数据λ与其重构版本κ,其公式为:
34、
35、式中,χdec为解码操作,χenc为其逆运算,即编码操作;
36、随后,引入类库普曼算子a与b,分别对应反向与正向动力学:
37、
38、
39、式中,λ(τ)表示时刻τ的变量状态,κ(τ-1)与κ(τ+1)分别表示(τ-1)与(τ+1)的变量状态。
40、在一个可选的实施例中,s1中,所述时空神经网络特征提取层还包括cnn结构与gru结构,用于搭建时空特征提取层提取风电系统数据时空相关性,两个并列的线性层用于拟合与近似库普曼算子。
41、在一个可选的实施例中,所述设计匹配不同预测任务的代价函数组合中,所述预测任务包括多元预测任务、单元预测任务、多对一预测任务与双向预测任务。
42、在一个可选的实施例中,s1中,训练时定义代价函数,
43、其中,代价函数为:
44、
45、多步风速预测模式下,经算子a,b作用后,当进行双向预测任务的前向或后向预测任务时,代价函数的公式分别为:
46、
47、
48、式中,λ为多步预测时的预测步长;
49、对于训练过程中约束a,b算子的方法,首先对a,b算子进行高阶向量的奇异值分解,公式为:
50、a=q1a′p1
51、b=q2b′p2
52、a,b算子同时训练时的约束函数公式为:
53、
54、其中,σ表示矩阵a”b”的大小,a”σ*表示矩阵a”的前σ行,a”*σ表示a”的左σ列,b”与a”同理;eσ为大小为σ×σ的单位矩阵,取与a”相同的大小;
55、当进行双向预测任务时,代价函数的公式为:
56、ε5=aε1+bε2+cε3+dε4
57、其中,a,b,c,d是可自定义的参数;
58、当只有多步多变量前向与后向预测任务时的代价函数分别为:
59、ε6=aε1+bε2
60、ε7=aε1+cε3
61、当只有多步多对一前向预测任务时的代价函数定义为式:
62、
63、其中kl-r|*i*表示l-r时刻,k的第i列(即待预测变量所在列),其余同理;
64、当只有单步多对一后向预测时的代价函数定义为:
65、
66、当只有单步多对一前向预测时的代价函数定义为:
67、
68、与现有技术相比,本发明具有以下优点:
69、1、本发明设计并搭建由卷积神经网络与门控循环单元组成的时空神经网络特征提取层,从时空两层面挖掘风电场非线性数据内部的依赖特征,并生成更加可靠的类库普曼线性矩阵;
70、2、本发明构造的多层深度神经网络挖掘的数据特征优越性高,可避免数据的关键特征挖掘不充分;
71、3、本发明在神经网络中引入了物理约束学习框架,提升了在该框架下的神经网络的可解释性。
72、4、该方法在结合考虑风电场时空相关性与序列波动性二者的基础上,额外考虑了时间可逆性的影响,保证了双向预测任务下的预测精度。
73、5、适配不同预测任务的代价函数使得所提方法的泛化能力更强、适用范围更广,足以应对多种预测任务。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194214.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表