电池故障预测模型训练方法及装置、预测方法及装置与流程
- 国知局
- 2024-07-31 22:57:53
本技术涉及人工智能,特别是涉及一种电池故障预测模型训练方法及装置、预测方法及装置。
背景技术:
1、电池组是新能源汽车的重要能量来源,它对新能源汽车有着至关重要的作用。如果电池发生故障,将会影响汽车的正常行驶,甚至会伤害车内人员的生命安全,故提前预测出电池故障并采取相应措施解决,才能有效保证电池的安全性和汽车运行的高效可靠性。
2、传统的新能源汽车电池故障诊断方法主要包括基于物理原理的充电状态检测、温度监控分析两种。由于新能源汽车电池系统具有高度的非线性和时变特性,故传统的数学模型也难以对电池系统的电流、温度信号进行有效分析。近年来,随着人工智能技术的发展和应用,开始利用机器学习算法分析电池数据,建立电池的健康指数评估模型实现故障预测。但是现有模型大多基于单一维度数据进行预测,并未充分利用数据的维度特征,存在故障预测精度和准确性低的问题。
技术实现思路
1、基于此,提供一种电池故障预测模型训练方法、预测方法及装置,改善现有技术中电池故障预测精度和准确性低的问题。
2、一方面,提供一种电池故障预测模型训练方法,包括:
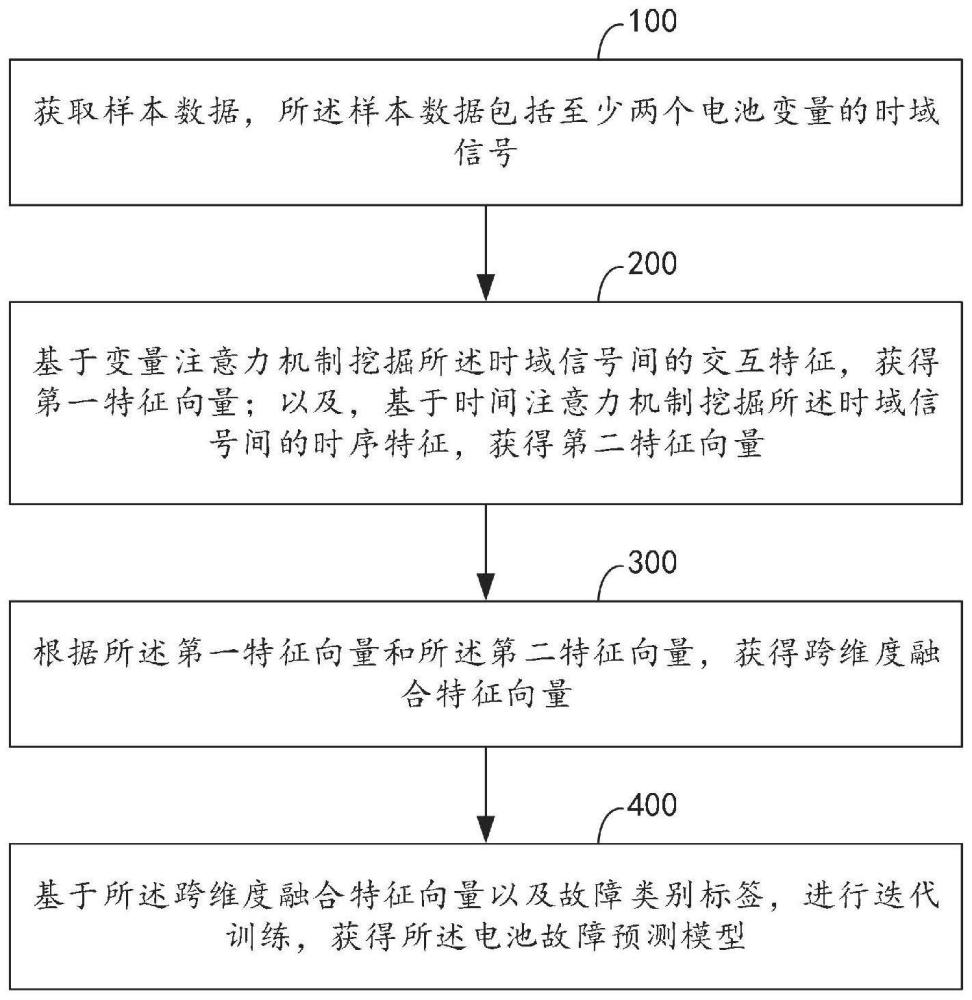
3、获取样本数据,所述样本数据包括至少两个电池变量的时域信号,所述电池变量包括电流、电压或温度,其中,至少部分所述样本数据标注有故障类别标签;
4、基于变量注意力机制处理所述时域信号间的交互特征,获得第一特征向量;
5、基于时间注意力机制处理所述时域信号间的时序特征,获得第二特征向量:
6、根据所述第一特征向量和所述第二特征向量,融合获得跨维度融合特征向量;
7、基于所述跨维度融合特征向量以及所述时域信号标注的所述故障类别标签,对置信网络进行迭代训练,获得所述电池故障预测模型。
8、在一个实施例中,所述融合获得跨维度融合特征向量,包括:
9、根据所述第一特征向量和第二特征向量,挖掘高维特征,分别获得变量维度空间特征和时间维度空间特征;
10、基于注意力机制提取所述变量维度空间特征和时间维度空间特征的交互信息,获得交互特征;其中,所述交互特征包括时间维度空间特征经过注意力机制处理后的特征,以及所述时间维度空间特征经过拼接,引导至变量维度后再经过注意力机制处理后的特征;
11、根据所述交互特征,基于交叉注意力机制进行特征融合,获得所述跨维度融合特征向量。
12、在一个实施例中,所述获取样本数据,还包括:
13、根据所述电池变量的时域信号进行时长域度划分,获得各个电池变量在不同时长域度的时域信号;
14、所述融合获得跨维度融合特征向量,包括:
15、融合各个时长域度的时域信号对应的第一特征向量和第二特征向量,获得各时长域度对应的跨维度融合特征向量;
16、所述融合获得跨维度融合特征向量之后,还包括:
17、线性融合各个时长域度对应的跨维度融合特征向量,获得跨域度时变融合特征向量,以基于所述跨域度时变融合特征向量对置信网络进行训练。
18、在一个实施例中,所述对置信网络进行迭代训练,包括:
19、获取时域信号传感器的位置矩阵;
20、基于多头注意力机制处理所述位置矩阵,获得全局交互矩阵;
21、根据所述全局交互矩阵与所述跨维度融合特征向量,或,根据所述全局交互矩阵和所述跨域度时变融合特征向量,基于图卷积算法获得图卷积向量,以基于所述图卷积向量对所述置信网络进行迭代训练。
22、在一个实施例中,所述对置信网络进行迭代训练,还包括:
23、基于一维卷积对所述图卷积向量提取时序特征,获得时序特征向量;
24、以所述时序特征向量作为受限波尔兹曼机的输入,根据所述受限波尔兹曼机的输出获得预测损失;
25、基于预测损失进行迭代训练获得所述电池故障预测模型。
26、在一个实施例中,所述对置信网络进行迭代训练,还包括:
27、基于半监督循环损失训练所述置信网络,以获得所述电池故障预测模型;
28、其中,所述半监督循环损失包括输出损失和距离损失,所述输出损失根据带有所述故障类别标签的样本数据的预测值和目标值确定,所述距离损失根据样本数据的预测值之间的差值和样本间相似性确定。
29、在一个实施例中,所述基于半监督循环损失训练所述置信网络,包括:
30、按照如下数学表达的半监督循环损失函数训练所述置信网络:
31、
32、其中,lsemicircle为半监督循环损失,f(xi)为第i个样本数据xi经过置信网络后的输出,y为目标值,为样本数据xi和xj在样本空间的距离的正则化项,为样本数据xi和xj的模型输出值的距离的正则化项,sij为样本数据xi和xj间的相似性权重,为可供调节的参数,l为带有所述故障类别标签的样本数据的数量,u为不带所述故障类别标签的样本数据的数量,ls为相似性权重构成的邻接矩阵的拉普拉斯矩阵,rank表示矩阵的秩,s.t.sij≥0表示约束条件为sij≥0,c表示邻接矩阵所构成连通图的连通分量数。
33、另一方面,提供一种电池故障预测方法,包括:
34、获取至少两个电池变量的时域数据,所述电池变量包括电流、电压或温度;
35、将所述时域数据输入电池故障预测模型中,获得故障预测结果;
36、所述电池故障预测模型根据所述的电池故障预测模型训练方法训练得到。
37、又一方面,提供一种电池故障预测模型训练装置,包括:
38、训练数据获取模块,用于获取样本数据,所述样本数据包括至少两个电池变量的时域信号,所述电池变量至少包括电流、电压或温度中的两个,其中,至少部分所述样本数据标注有故障类别标签;
39、模型训练模块,用于基于变量注意力机制处理所述时域信号间的交互特征,获得第一特征向量;基于时间注意力机制处理所述时域信号间的时序特征,获得第二特征向量:根据所述第一特征向量和所述第二特征向量,融合获得跨维度融合特征向量;基于所述跨维度融合特征向量以及所述时域信号标注的所述故障类别标签,对置信网络进行迭代训练,获得所述电池故障预测模型。
40、还提供一种电池故障预测装置,包括:
41、电池数据获取模块,用于获取至少两个电池变量的时域数据,所述电池变量至少包括电流、电压或温度中的两个;
42、故障预测模块,用于将所述时域数据输入电池故障预测模型中,获得故障预测结果;所述电池故障预测模型根据所述的电池故障预测模型训练方法训练得到。
43、上述电池故障预测模型训练方法,获取具有多个变量的样本数据,一方面采用变量注意力机制挖掘信号间的交互信息,另一方面采用时间注意力机制挖掘信号在不同时刻之间的时序特征,并进行跨维度融合,有效利用了样本数据的时变特征,增强不同维度信息的交流,将不同维度特征进行融合,消除不同维度特征间的冗余信息,提高模型预测故障的精度和准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。