一种星上支架类结构的可控形状混合优化设计方法与流程
- 国知局
- 2024-07-31 23:11:19
本发明涉及一种星上支架类结构的可控形状混合优化设计方法,属于空间飞行器结构。
背景技术:
1、卫星结构是卫星的关键组成部分,其主要功能是支撑有效载荷及仪器设备,并提供必要的安装空间,承受和传递作用在卫星上的静、动载荷,保证强度和刚度。结构重量是卫星的一项重要指标,一般有明确的轻量化设计需求,结构的轻量化设计一直贯穿整个设计过程。卫星结构大量使用箱板式结构与各种支架类结构,通过总体构型布局设计、主次结构一体化设计、增加减轻孔减轻槽设计、使用轻质材料等传统方法实现结构轻量化设计,而箱板式结构、传统机械加工结构的设计、分析与制造技术较成熟,重量、成本、周期难有大幅度提升。为了进一步降低结构重量,随着增材制造技术的发展,卫星上开始使用拓扑优化与增材制造相结合的技术,有效实现了部分星上支架类结构的大幅减重设计。
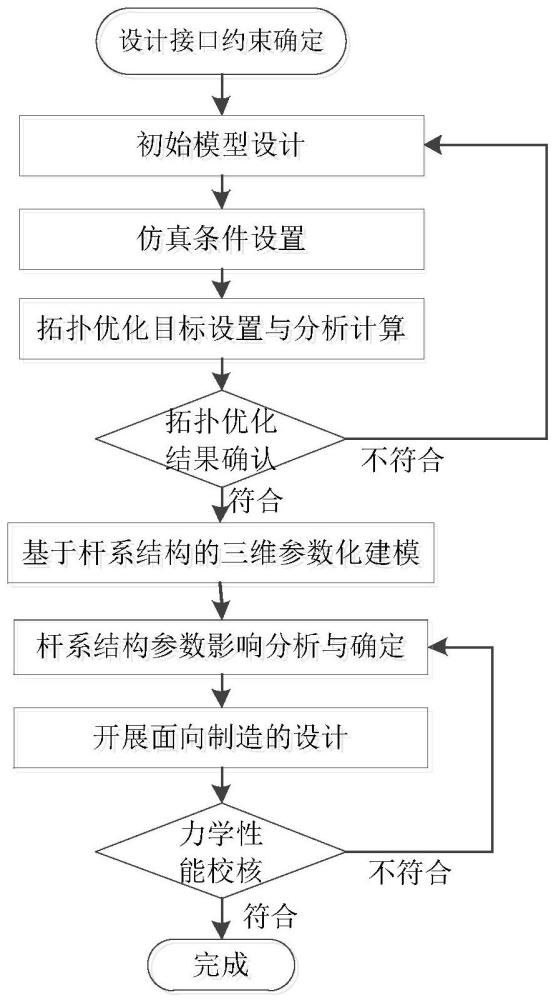
2、一般采用拓扑优化直接光顺建模设计方法,具体步骤简述如下:设计接口约束确定、初始模型设计、仿真条件设置、拓扑优化目标设置与分析计算、拓扑优化结果确认、光顺设计建模、力学性能校核。典型应用为张立华等在《嫦娥四号任务中继星“鹊桥”技术特点》中应用的嫦娥四号“鹊桥”中继星斜装星敏感器和动量轮支架、刘正山等在《一种卫星推力器3d直属件结构设计方法》中应用的通信卫星双头推力器支架、王瑞显等在《小卫星一体化星敏支架拓扑优化》中提到的一体化星敏支架,等等。
3、但是,由于拓扑优化计的结果为体现材料分布的几何模型,不能直接用于零件制造,设计师需要依据个人经验使用软件工具对分析结果几何模型进行包覆处理、再设计等光顺建模操作,不可避免地,采用拓扑优化直接光顺建模设计方法存在以下不足:
4、(1)设计参数不可控:拓扑优化结果只反映了各个部分的材料堆积及走向趋势,具体的光顺建模工作还需要由设计师手工自由曲面造型,甚至部分特征还需要依靠设计师的经验直接创建。
5、(2)设计时间不可控:光顺建模没有明确的特征参数,一般情况下,根据设计师个人经验不同,存在多轮建模与分析的迭代。
6、(3)减重效果不可控:通过光顺建模的模型特征缺少精确的设计参数,可能存在过设计的特征,难以根据力学性能校核结果再优化减重。
7、(4)初始约束边界合理性不可控:拓扑优化的初始约束接口边界是在一定的设计布局空间下由设计经验确定,部分接口对支架的性能影响很小,存在冗余或不合理的可能性。
8、(5)外形美观不可控:设计师一般是机械设计加工思维,只考虑达到性能的结构,支架的粗细过渡等特征建模可能存在不和谐的状态。
9、(6)定制化设计:光顺建模均根据某一拓扑优化结果定制化设计,最终模型没有可直接调整的参数,无法直接用于相似结构的轻量化设计,当初始状态发生微调,所有优化设计过程需要重做一遍。
10、综上,目前采用的拓扑优化直接光顺建模设计方法虽然能够实现结构的轻量化设计,但由于其存在设计参数、时间、减重效果等不可控的先天设计缺陷,在实际工程应用中,拓扑优化与增材制造相结合的轻量化技术不能体现短周期优势,甚至比依靠经验的直接减重设计工作量还大,对于单件或小批量零件并没有大规模应用。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种星上支架类结构的可控形状混合优化设计方法,将不可控的光顺建模设计转变为可控的参数化建模设计,有效地降低了结构重量,为星上支架类结构的轻量化设计提供参考。
2、本发明的技术解决方案是:
3、一种星上支架类结构的可控形状混合优化设计方法,包括以下步骤,
4、(1)确定设计接口约束;
5、在星上依据设备的极性、视场、位置布局约束,建立设备布局模型,确定准备进行拓扑优化设计支架的设计接口约束,包括设备与支架之间安装接口、支架与星体之间安装接口;
6、(2)设计初始模型;
7、依据所述设计接口约束建立拓扑优化前的初始模型,并依据所述设计接口约束划分设计空间与非设计空间;
8、所述设计空间是指模型的可优化区域,允许对该区域的材料分布进行优化;
9、所述非设计空间是指模型的非优化区域,不允许对该区域的材料分布进行优化,包括模型中与外界有机械接口的部分;
10、(3)设置仿真条件;
11、在所述初始模型中设置仿真条件,包括固定约束、载荷条件、零件材料,完成仿真前处理工作;
12、(4)设置拓扑优化目标;
13、设置拓扑优化目标,星上支架采用最大化刚度或最小化质量作为拓扑优化目标;
14、(5)确认拓扑优化结果;
15、由拓扑优化软件完成拓扑优化计算后,得到体现材料分布的拓扑优化结果几何模型;
16、(6)基于杆系结构进行三维参数化建模;
17、依据所述拓扑优化结果几何模型,利用三维cad软件进行参数化建模,通过拓扑优化结果几何模型确定支架的连接节点,再将各连接节点使用杆系结构连接,形成基于杆系结构的参数化三维模型;
18、(7)确定杆系结构主要设计参数;
19、将各连接杆的有无、截面尺寸作为优化参数,结构刚度与重量作为综合优化目标,开展各参数变化对结构刚度性能的影响分析,进而确定杆系结构主要设计参数;
20、(8)开展面向制造的设计;
21、基于确定的杆系结构主要设计参数及设计形状,开展面向制造的设计,包括连接点设计、倒圆角设计、工艺孔设计,形成面向制造的三维模型;
22、(9)力学性能校核;
23、使用有限元分析方法对支架零件进行结构强度的分析校核,若结构强度性能不满足要求,则返回步骤(7)局部调整杆系结构的主要设计参数,进行再设计。
24、进一步的,步骤(6)基于杆系结构进行三维参数化建模,具体为:
25、(6.1)设计接口参数化三维建模;
26、(6.2)将拓扑优化结果几何模型的几何形状交叉点设置为连接节点,依据拓扑优化结果几何模型走向趋势,使用圆杆特征连接各连接节点,形成基于杆系结构的参数化三维模型,并对各连杆进行编号。
27、进一步的,步骤(7)确定杆系结构主要设计参数,具体为:
28、(7.1)分析确定单实心杆状态参数对支架一阶固有频率的影响;
29、(7.2)分析确定多杆组合状态参数对支架一阶固有频率的影响;
30、(7.3)进行杆系结构状态参数化三维建模;
31、(7.4)对连杆截面参数进行优化设计,确定杆系结构的主要设计参数。
32、进一步的,步骤(7.1)分析确定单实心杆状态参数对支架一阶固有频率的影响,具体为:
33、(7.1.1)所有连杆均为实心,调整每根连杆的外径参数,其中外径0mm表示取消此连杆,分别计算得到不同单杆不同外径参数的支架一阶固有频率与重量;
34、(7.1.2)由步骤(7.1.1)的计算结果得到支架一阶固有频率与不同杆直径的变化关系,各连杆在外径参数范围内,支架一阶固有频率曲率变化的拐点即为此连杆直径的最小值;
35、(7.1.3)由步骤(7.1.1)的计算结果得到一阶固有频率与连杆状态的变化率关系,通过评估取消某根连杆时对支架一阶固有频率的变化率,确定取消某根连杆对支架一阶固有频率的影响;通过评估改变某根连杆的外径不小于最小外径范围时对一阶固有频率的变化率,确定某根连杆外径变化对支架一阶固有频率的影响;
36、(7.1.4)不同外径的支架一阶固有频率变化率/不同外径的支架重量变化率反映了每单位重量变化对一阶固有频率影响情况,即优化效率,作为优化优先级的判据;当改变直径时对支架一阶固有频率的影响接近时,优先调整一阶固有频率变化与重量变化率较大的连杆;
37、(7.1.5)确定主要承力杆和次要承力杆;对支架一阶固有频率影响超过设置阈值且优化效率达到某一定值的各连杆作为主要承力杆,进行优化设计;其余连杆作为次要承力杆,后续设置为满足强度和工艺要求的最小值。
38、进一步的,所述步骤(7.1.3)中改变某根连杆的外径不小于最小外径范围时对一阶固有频率的变化率,其计算方法具体为:
39、(最大外径时的一阶固有频率-最小外径时的一阶固有频率)/最小外径时的一阶固有频率×100%。
40、进一步的,所述步骤(7.1.3)某根连杆的不同外径对支架一阶固有频率的影响程度根据支架实际情况确定,当取消或者改变直径时对支架一阶固有频率的影响均不足一定值时,此连杆可以取消。
41、进一步的,所述步骤(7.1.4)中的不同外径的支架重量变化率,其计算方法具体为:(最大外径时的支架重量-最小外径时的支架重量)/最小外径时的支架重量×100%。
42、进一步的,步骤(7.2)分析确定多杆组合状态参数对支架一阶固有频率的影响,具体为:
43、(7.2.1)分别针对所述步骤(7.1.5)的次要承力杆,选取任意多连杆组合取消状态进行分析计算,得到多连杆组合取消时的支架一阶固有频率和重量;
44、(7.2.2)分别计算所述步骤(7.2.1)不同多连杆组合取消时的支架一阶固有频率变化率,具体为:(所有连杆状态的一阶固有频率-当前状态的一阶固有频率)/所有连杆状态的一阶固有频率×100%;
45、其中所有连杆状态定义为任何连杆都不取消的支架状态,当前状态定义为某种多连杆组合取消后的支架状态;
46、(7.2.3)分别计算:一阶固有频率的变化率/重量变化率,其反映了频率衰减与重量降低之间的关系,即比值越大,相同减重下,频率衰减越快;其值低于某一定值的状态作为后续优化状态;
47、(7.2.4)通过步骤(7.2.2)和(7.2.3)的计算结果,选择支架一阶固有频率变化率低于某设置阈值、同时一阶固有频率的变化率/重量变化率的值超过某一定值的状态,确定为最终状态。
48、进一步的,所述步骤(7.2.3)中的重量变化率,其计算方法具体为:
49、(所有连杆状态的支架重量-当前状态的支架重量)/所有连杆状态的支架重量×100%。其中所有连杆状态定义为任何连杆都不取消的支架状态。
50、进一步的,所述步骤(7.2.3)后续优化状态为多连杆组合下的一阶固有频率的变化率与重量变化率间的比值低于某一定值的状态,该状态表明该多连杆组合对支架的一阶固有频率的影响在可接受范围内,将该多连杆同时取消不会对支架一阶固有频率产生不可接受的影响,当该多连杆中存在与星体间连接接口连接的连杆时,能够减少支架和星体间的安装接口。
51、进一步的,步骤(7.4)对连杆截面参数进行优化设计,确定杆系结构的主要设计参数,具体为:
52、(7.4.1)引入空心杆作为变量,进一步对截面形状和截面尺寸做分析优化,其中主要承力杆和次要承力杆分别设置2组独立优化参数;
53、(7.4.2)分别对所述步骤(7.4.1)的独立优化参数状态进行分析计算,得到各状态的支架一阶固有频率与重量;
54、(7.4.3)确定大于支架一阶固有频率目标值的状态;
55、(7.4.4)计算支架一阶固有频率/支架重量,该比值反映了支架优化的减重效果,比值越高,效果越明显;以支架一阶固有频率/支架重量作为支架优化效率的评估系数,选择步骤(7.4.3)中的支架一阶固有频率/支架重量值最大的,确定为最终支架设计状态。
56、本发明与现有技术相比的优点在于:
57、(1)本发明的星上支架类结构的可控形状混合优化设计方法,能够将拓扑优化结果到最终设计投产三维模型的轻量化设计建模过程流程化,减少对设计经验的依赖;将不可控的光顺建模设计转变为可控的参数化建模设计,能优化支架与星体之间的安装接口数量,实现面向工程实际的更优的优化设计结果;优化过程程序化、优化结果参数化更能够进一步实现自动化设计优化,通过一次优化实现一类结构的轻量化设计。
58、(2)本发明涉及空间飞行器结构技术领域,首次实现了星上支架类拓扑优化结构的形状可控、参数可控的轻量化设计。本方法可用于星上支架类结构的轻量化设计,也可以根据不同的设计要求调整设计参数实现各类桁架结构的优化设计,更能基于本发明步骤和算法开发相应的自主优化设计软件。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196303.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。