一种基于增强黏菌算法对接触网无人机路径规划的方法与流程
- 国知局
- 2024-07-31 23:54:27
本发明属于铁路交通管理领域,尤其涉及铁路线路的规范性和安全性巡检,具体为一种基于增强黏菌算法对接触网无人机路径规划的方法。
背景技术:
1、近年来,铁路快速发展建设和运营里程越来越多,随之而来的是铁路建设和运营过程中铁路线路需要规范性和安全性巡检。高速铁路接触网螺母在铁路稳定运行方面具有非常重要的作用,一旦螺母出现松脱,将严重威胁输电线路供电系统的顺利运行。由于铁路工地环境复杂,人工巡检存在作业效率低、量测精度低和存在检测盲区等情况,而且人工巡检的周期很长,这也给判断结果造成了很大的干扰。
2、如今,无人机+激光雷达技术逐渐被应用于巡检中,但需要对无人机巡检路径进行合理的规划,进而保证无人机在最短时间内完成巡检任务。使用无人机为高速铁路接触网巡检提出了更加省时省力的思路,然而传统的无人机路径规划在搜索范围以及寻找目标方面效果欠佳,常出现局部最优解的情况。
技术实现思路
1、本发明针对以往传统的无人机巡检路径规划在搜索范围以及寻找目标方面效果欠佳的问题,提供了一种基于增强黏菌算法对接触网无人机路径规划的方法。
2、本发明是采用如下的技术方案实现的:一种基于增强黏菌算法对接触网无人机路径规划的方法,包括以下步骤:
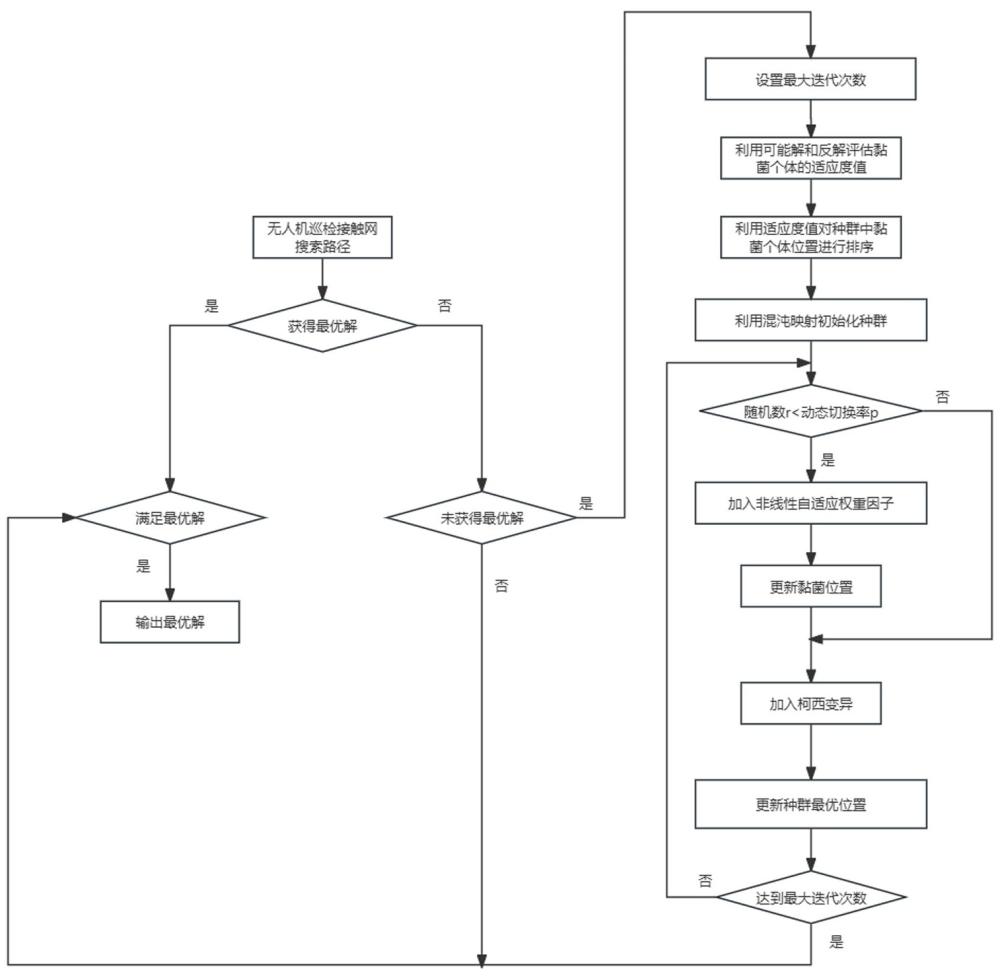
3、步骤1:对黏菌算法中的种群数、最大迭代次数进行设定;
4、步骤2:将巡检的无人机作为种群中的黏菌个体,采用增强黏菌优化作为超参数优化器,支持无人机在巡检接触网过程中的无线网络中的资源分配,将带宽、功率和计算资源分配给多架巡检过程中的无人机,拓宽无人机巡检接触网时的搜索区域,避免过早收敛,采用可能解或反解来评估黏菌个体的适应度值,然后根据适应度值将种群中的黏菌个体位置进行排序;
5、步骤3:种群中的黏菌个体位置排序后,利用自适应优化根据无人机巡检接触网经过的实际环境,建立相关的地形模型、各种威胁源和无人机约束模型;随后采用混沌映射初始化种群数;
6、步骤4:设定随机数r并判断r与全局更新和局部更新的动态切换概率p的关系,如果r<p,则黏菌个体靠近食物并在位置更新过程中加入非线性自适应权重因子ω,更新得到黏菌个体的最佳位置xnew;经过混沌映射之后,为了进一步提高算法精度,避免黏菌个体在觅食过程中陷入局部最优解,故引入非线性自适应权重因子ω;
7、步骤5:目前更新得到的最佳位置xnew并非最优,对当前的最佳位置xnew进行柯西变异,更新得到最优位置xbnew;
8、步骤6:判断目前是否已经达到最大迭代次数,若达到则停止更新输出最优位置xbnew,此时,无人机路径规划完成;否则重复步骤4和5,继续更新迭代,直到满足要求为止。
9、上述的一种基于增强黏菌算法对接触网无人机路径规划的方法,步骤4中更新黏菌个体的最佳位置xnew的过程为:,式中: xnew表示最佳位置,t表示当前迭代次数,vc、vb为参数,xb(t)表示第t次迭代中第b个解向量,代表当前食物浓度最高的位置,根据该位置获得最佳位置;xa(t)表示第t次迭代中第a个解向量, xb(t)表示第t次迭代中第b个解向量,xa(t)、xb(t)代表随机选取的两个黏菌位置;w表示黏菌质量参数。
10、上述的一种基于增强黏菌算法对接触网无人机路径规划的方法,步骤5中柯西变异的具体过程为:,,,式中:θ为常数,rmax表示黏菌个体之间的最远距离;f(γ)表示柯西变异分布函数,xnew表示最佳位置;xbnew表示最优位置,tmax表示最大迭代次数,r为随机数,γ表示柯西变异分布函数中的随机样本值。
11、上述的一种基于增强黏菌算法对接触网无人机路径规划的方法,动态切换概率p的计算方式为:,tmax表示最大迭代次数,t表示当前迭代次数。
12、上述的一种基于增强黏菌算法对接触网无人机路径规划的方法,非线性自适应权重因子ω的计算方式为:,式中:ωmax和ωmin分别为非线性自适应权重因子的最大值和最小值,t表示当前迭代次数,tmax表示最大迭代次数。
13、本方法主要是在黏菌算法的基础上加以修正增强,拓宽了无人机巡检接触网时的搜索区域,引入了非线性自适应权重因子,有利于黏菌觅食过程中跳出局部最优,提高了算法的精度,有益于寻找到更合适的位置,提升无人机路径规划能力。
技术特征:1.一种基于增强黏菌算法对接触网无人机路径规划的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于增强黏菌算法对接触网无人机路径规划的方法,其特征在于,步骤4中更新黏菌个体的最佳位置的过程为:
3.根据权利要求2所述的一种基于增强黏菌算法对接触网无人机路径规划的方法,其特征在于,步骤5中柯西变异的具体过程为:
4.根据权利要求2或3所述的一种基于增强黏菌算法对接触网无人机路径规划的方法,其特征在于,p的计算方式为:,tmax表示最大迭代次数,t表示当前迭代次数。
5.根据权利要求1或2或3所述的一种基于增强黏菌算法对接触网无人机路径规划的方法,其特征在于,非线性自适应权重因子ω的计算方式为:
技术总结本发明属于铁路交通管理领域,具体为一种基于增强黏菌算法对接触网无人机路径规划的方法,包括以下步骤:对黏菌算法中的种群数、最大迭代次数进行设定;增加了增强黏菌优化,拓宽无人机搜索区域,优化资源分配,再根据适应度值将种群中的黏菌个体位置进行排序;种群中的黏菌个体位置排序后,采用混沌映射初始化种群数;判断随机数r与动态切换概率p的关系,如果r<p,则加入非线性自适应权重因子,更新最佳位置;对最佳位置进行柯西变异,更新最优位置;若达到迭代次数,输出最优位置,此时,无人机路径规划完成。本发明在黏菌算法的基础上加入了增强和自适应效果,拓宽了无人机巡检接触网时的搜索区域,并避免陷入局部最优解。技术研发人员:李利军,杨帆,李灯熬,霍晓东,曹斐,郝学勇,刘容麟,赵菊敏,曹桂枝,刘春平,程俊兵,张嘉民,马昊博,蒋宇,韩英姣,马光辉受保护的技术使用者:中国铁建电气化局集团第二工程有限公司技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/199099.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表