一种双馈风机参与电网一二次调频的自适应综合控制方法
- 国知局
- 2024-07-31 17:22:15
本发明属于新能源并入电网频率稳定控制,具体涉及一种双馈风机参与电网一二次调频的自适应综合控制方法的设计。
背景技术:
1、高渗透率风电以“零惯量”特性并网将导致电网遭遇故障扰动时频率失稳的风险增加,针对这一问题,国内外的学术界及工业界从风电机组频率控制策略的角度出发展开一系列研究。双馈风电机组(dfig,doubly fed induction generator)以典型矢量控制参与电网调频时,其能量通常来源于其转子及桨叶。尽管母线电容可提供能量以参与调频,但该部分能量相较于转子及桨叶所能提供的能量而言,基本上可以不予考虑。根据dfig机组参与调频时的能量来源,可将其频率控制方式分为功率备用控制及转子动能控制。
2、功率备用控制包括转子超速控制与桨距角控制,其主要原理在于系统发生扰动之前,dfig机组并未工作于最大功率追踪(maximum power point tracking,mppt)模式,从而预留出备用有功以参与系统调频。其中,转子超速控制通过增大转子转速,使dfig机组工作于非mppt曲线的次优功率曲线以预留有功备用,并在系统频率扰动时降低转子转速以改变其输出功率。对于桨距角控制,其核心原理为改变桨叶的初始桨距角,从而改变dfig机组捕获的机械功率,在系统频率扰动时调整桨距角以改变其输出功率。对于固定减载率d,转子超速控制及桨距角控制下的机械功率有如下表达式:
3、
4、
5、
6、其中,pmppt为最大机械功率,pde为减载机械功率,ρ为空气密度,sw为桨叶扫风面积,rw为叶片半径,λopt为最优叶尖速比,λde为转子超速后的叶尖速比,β0为预留桨距角大小,cp为风能转换系数,ωa、ωb、ωd为相应的转子转速。
7、转子动能控制可利用dfig机组转子中存储的旋转动能参与系统频率调节,主要通过虚拟惯量综合控制(由虚拟惯量控制与下垂控制组成)改善dfig“零惯量”特性,从而阻止频率的过快变化,降低系统最大频率偏差。虚拟惯量控制的基本原理是模拟同步机的惯性响应,通常是在dfig机组的有功控制环路附加与频率变化率耦合的控制量,在系统频率扰动期间调整有功出力指令形成频率-功率激励关系。下垂控制基本原理在于根据系统频率偏差调整dfig机组的有功出力,以达到同步机组一次调频的效果。当dfig机组通过虚拟惯量参与调频时,系统最大频率偏差由惯性比例系数及下垂系数共同决定,呈正相关性。
8、dfig机组在虚拟惯量综合控制下,响应系统频率扰动所提供的附加功率有如下表达式:
9、
10、其中,δpw为dfig机组附加输出功率,kd为惯性比例系数,kp为下垂系数,f为系统的实时频率,fn为电网额定频率。
11、现有研究中,dfig机组下垂系数的整定并没有考虑到电力系统功率扰动的大小,且对于不同的系统或者不同的故障扰动场景,传统pi控制参数的适用性不强。此外,dfig机组在转速恢复阶段,现有策略易导致系统频率二次跌落现象的出现,不利于系统的频率稳定性。
12、同时,现有研究当中仅以额定风速作为超速减载与预留桨距角减载的协调指标,当所处环境风速相对较小时,dfig机组可充分预留减载备用,但受到dfig机组转子最大转速的限制,当减载率要求超过一定阈值后,在额定风速以下的部分风速段,机组转子超速至转速上限仍无法满足系统的减载备用要求。此时,dfig机组无法继续使转子超速,剩余的减载备用比例需要桨距角控制协助实现,因此应将预留桨距角减载方式的应用范围相应扩大,以满足系统对减载备用的要求,实现dfig机组在全风速段下的减载预留备用控制。
技术实现思路
1、本发明的目的是为了解决现有针对dfig机组的控制方法中频率控制系数的整定没有考虑不同扰动情况的差异,没有实现dfig机组在全风速段的稳定减载备用的问题,提出了一种双馈风机参与电网一二次调频的自适应综合控制方法。
2、本发明的技术方案为:一种双馈风机参与电网一二次调频的自适应综合控制方法,包括以下步骤:
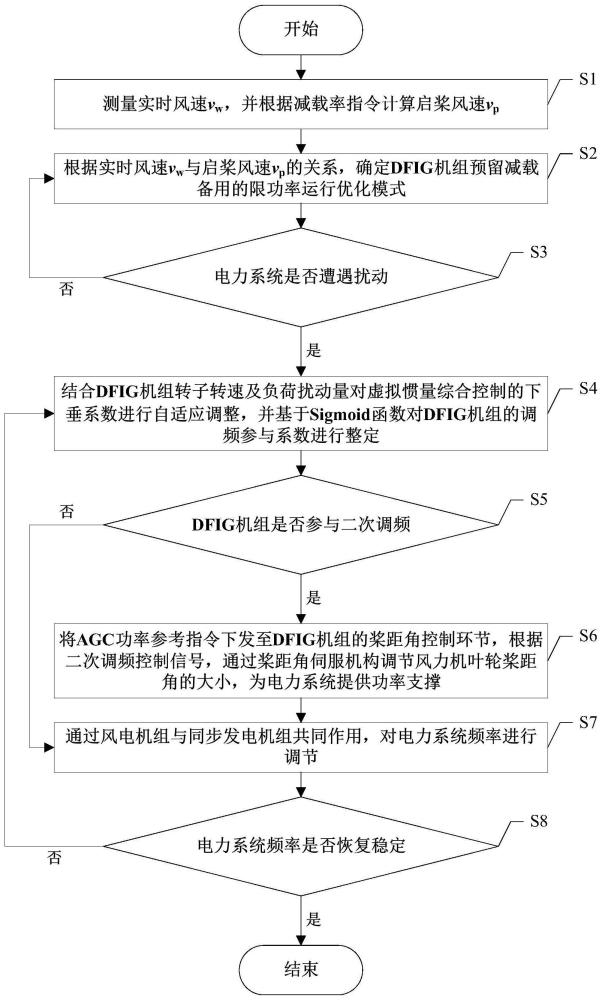
3、s1、测量实时风速vw,并根据减载率指令计算启桨风速vp。
4、s2、根据实时风速vw与启桨风速vp的关系,确定dfig机组预留减载备用的限功率运行优化模式。
5、s3、判断电力系统是否遭遇扰动,若是则进入步骤s4,否则返回步骤s2。
6、s4、结合dfig机组转子转速及负荷扰动量对虚拟惯量综合控制的下垂系数进行自适应调整,并基于sigmoid函数对dfig机组的调频参与系数进行整定。
7、s5、判断dfig机组是否参与二次调频,若是则进入步骤s6,否则进入步骤s7。
8、s6、将agc功率参考指令下发至dfig机组的桨距角控制环节,根据二次调频控制信号,通过桨距角伺服机构调节风力机叶轮桨距角的大小,为电力系统提供功率支撑。
9、s7、通过风电机组与同步发电机组共同作用,对电力系统频率进行调节。
10、s8、判断电力系统频率是否恢复稳定,若是则控制结束,否则返回步骤s4。
11、进一步地,步骤s2具体为:
12、若vp≥vn,当vin<vw≤vn时,通过超速减载控制实现dfig机组的限功率运行,当vn<vw≤vout时,通过预留桨距角实现dfig机组的限功率运行;其中vin表示dfig机组的切入风速,vn表示dfig机组的额定风速,vout表示dfig机组的切出风速。
13、若vp<vn,当vin<vw≤vp时,通过超速减载控制实现dfig机组的限功率运行,当vp<vw≤vn时,通过超速减载控制与预留桨距角2种方式实现dfig机组的限功率运行,当vn<vw≤vout时,通过预留桨距角实现dfig机组的限功率运行。
14、进一步地,步骤s4中下垂系数kp的表达式为:
15、
16、其中σ和μ均表示下垂系数调节因子,ωr表示dfig机组的转子转速,ωrmin表示转子转速的最小值,δpl表示系统负荷扰动量,pn表示系统总的额定容量,δf表示系统频率偏差。
17、进一步地,步骤s4中调频参与系数kpar的表达式为:
18、
19、其中t1表示电力系统遭遇扰动时刻,t2表示开始退出调频时刻,t3表示参与调频结束时刻,smin表示系数终值,s0表示系数初始值,r表示衡量曲线变化快慢的系数,t表示时间。
20、进一步地,步骤s6具体为:
21、通过使能信号e0控制预留桨距角环节,通过使能信号e1控制桨距角补偿环节。
22、当dfig机组无需预留桨距角减载时,e0=0;当dfig机组需要预留桨距角减载时,e0=1,按照调度下发的减载指令配置dfig机组的调频备用。
23、当dfig机组不参与二次调频时,二次调频过程中e1=0;当dfig机组参与二次调频时,e1=1,根据系统分配的agc功率指令调整其桨距角的大小,从而向电力系统提供有功支撑,分担同步机组的二次调频任务。
24、本发明的有益效果是:本发明在现有的dfig机组限功率运行模式的基础上,基于启桨风速优化了超速减载控制与预留桨距角控制2种方式的协调机制,结合dfig机组转子转速及负荷扰动量对虚拟惯量综合控制的下垂系数进行自适应调整,基于sigmoid函数对dfig机组的调频参与系数进行整定,并在传统桨距角控制的基础上,基于限功率运行优化模式及电力系统agc控制信号进行改进,从而有效改善了dfig机组参与电网调频时系统的频率响应特性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/175150.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表