一种C形臂和G形臂的内走线结构的制作方法
- 国知局
- 2024-07-31 17:40:02
本技术涉及c形臂和g形臂的内走线,具体为一种c形臂和g形臂的内走线结构。
背景技术:
1、c形臂和g形臂也称为c形臂x光机和g形臂x光机,顾名思义,该设备由一个c臂框架(g臂框架)、一个(或两个)x射线发生器、一个(或两个)x射线球管、一个(或两个)平板探测器以及一个图像采集处理工作站组成,它们在医疗行业应用广泛,特别是对于骨科手术来说是必不可少的设备。
2、目前,在相关技术中,c形臂和g形臂的线缆多数布置在外部,形成外部走线形式,这样的走线形式在设备进行移动时会带来极大的不便,线缆长期裸露在外,容易造成线缆氧化、磨损、损坏以及繁杂的视觉感受等问题,导致器械使用中带来的不方便性,给用户的使用带来安全隐患,并且外部走线在患者手术之前需要对线缆进行消毒处理增加工作量,还经常需要密封包裹防止转动过程中掉灰尘增加感染因素,所以为了能够使更加方便快捷的在临床应用中使用移动设备,需要一种将电缆走线隐藏在设备内部的走线结构。
技术实现思路
1、本实用新型的目的在于提供一种c形臂和g形臂的内走线结构,以解决上述背景技术中提出外部走线形式移动时较为不便,容易造成线缆氧化、磨损、损坏以及繁杂的视觉感受等问题,同时也方便对设备进行消毒处理。
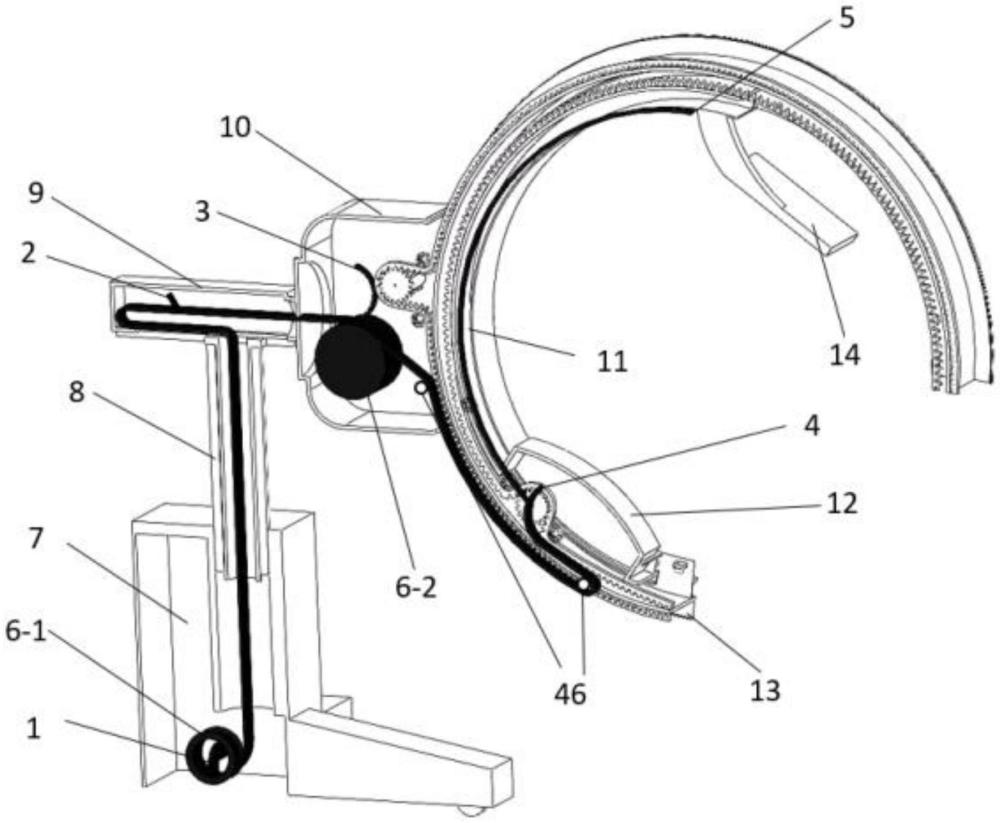
2、为实现上述目的,本实用新型提供如下技术方案:一种c形臂和g形臂的内走线结构,该内走线结构可以用于c形臂和g形臂,所述c形臂分为嵌套式c形臂(嵌套式c形臂的外部c臂和内部c臂可以相对运动)和非嵌套式c形臂,其结构由线缆、线鼓、主体、升降竖柱、滑枕、c臂支架、c臂、球管、平板探测器组成,其中线缆由接头一至接头十组合而成,线鼓包括线鼓一至线鼓四,c臂由内部c臂和外部c臂构成,且内部c臂与外部c臂固接,并且内部c臂的两端还分别固接有球管与平板探测器;所述主体的内部设置有线鼓一或线鼓三,且线鼓一或线鼓三的一端留有接头一或接头六,并且接头一或接头六与主体内部的电路连接,所述主体与升降竖柱滑接并在连接处留有走线口,线缆通过该走线口由主体进入升降竖柱的内部,升降竖柱与滑枕滑接并在连接处留有走线口,线缆通过该走线口由升降竖柱进入滑枕的内部,所述滑枕内部的线缆留有接头二或接头七,接头二或接头七与滑枕内部的电路连接,滑枕与c臂支架通过轴承转动连接并在连接处留有走线口,线缆通过走线口进入c臂支架的内部,c臂支架内设有线鼓二或线鼓四,c臂支架内部留有接头三或接头八,接头三或接头八与c臂支架内部的电路连接。
3、所述g形臂分为嵌套式g形臂(嵌套式g形臂的外部c臂和内部c臂可以相对运动)和非嵌套式g形臂,其结构由线缆、线鼓、主体、升降竖柱、滑枕、g臂支架、g臂、球管、第二球管、平板探测器、第二平板探测器组成,其中线缆由接头十一至接头廿四组合而成,线鼓包括线鼓五至线鼓八,g臂由第二内部c臂与第二外部c臂构成,且第二内部c臂与第二外部c臂固接,并且第二内部c臂的两端还分别固接有球管与平板探测器,第二外部c臂的一端固接有第二平板探测器;所述主体的内部设置有线鼓五或线鼓七,且线鼓五或线鼓七的一端留有接头十一或接头十八,接头十一或接头十八与主体内部的电路连接;所述主体与升降竖柱滑接并在连接处留有走线口,线缆通过该走线口由主体进入升降竖柱的内部,所述升降竖柱与滑枕滑接并在连接处留有走线口,线缆通过该走线口由升降竖柱进入滑枕的内部,所述滑枕内部的线缆留有接头十二或接头十九,接头十二或接头十九与滑枕内部的电路连接,滑枕与g臂支架通过轴承转动连接并在连接处留有走线口,线缆通过走线口进入g臂支架的内部,g臂支架的内部设有线鼓六或线鼓八,所述g臂支架的内部留有接头十三或接头二十,接头十三或接头二十与g臂支架内部的电路连接。
4、优选的,所述嵌套式c形臂中的外部c臂滑接在c臂支架的导轨内并与c臂支架的连接处留有走线口,线缆通过导向滑轮沿外部c臂的腔体向下与外部c臂的一端连接,线缆通过导向滑轮翻折沿内部c臂和外部c臂之间的腔体与内部c臂的两端连接,并留有接头四和接头五,接头四与球管内部的电路连接,接头五与平板探测器内部的电路连接。
5、优选的,所述非嵌套式c形臂中的c臂滑接在c臂支架的导轨内并与c臂支架连接处留有走线口,线缆通过导向滑轮沿c臂内部的腔体向下与c臂一端的连接处留有接头九,线缆通过导向滑轮翻折,接头九与球管内部的电路连接,通过球管线缆沿c臂正面腔体向上与c臂另一端连接并留有接头十,接头十与平板探测器内部的电路连接。
6、优选的,所述嵌套式g形臂中的第二外部c臂滑接在g臂支架的导轨内与g臂支架连接并留有走线口,线缆分为两股一股从走线口进入第二外部c臂,一股通过导向滑轮沿第二外部c臂的腔体向上与第二外部c臂的一端连接并设有接头十七,接头十七与第二平板探测器内部的电路连接,另一股通过导向滑轮沿第二外部c臂的腔体向下与第二外部c臂的另一端连接,线缆通过导向滑轮翻折并分为三股线缆,一股的接头十四与第二球管内部的电路连接,另两股线缆通过第二外部c臂上的走线口沿第二内部c臂和第二外部c臂之间的腔体,与第二内部c臂两端连接并留有接头十六和接头十五,接头十六与平板探测器内部的电路连接,接头十五与球管内部的电路连接。
7、优选的,所述非嵌套式g形臂中的g臂滑接在g臂支架的导轨内与g臂支架连接并留有走线口,线缆分为两股分别沿走线口进入g臂,一股通过导向滑轮沿g臂背部腔体向上与g臂一端连接并设有接头廿四,接头廿四与第二平板探测器内部的电路连接,另一股通过导向滑轮沿g臂(45)内部与外部之间的腔体向下到第二球管,线缆通过导向滑轮翻折并分为三股线缆,一股与第二球管连接并设有接头廿一,接头廿一与第二球管内部的电路连接,另两股分别沿g臂正面腔体与球管和平板探测器相连并留有接头廿二和接头廿三,其中接头廿二与球管内部的电路连接,接头廿三与平板探测器内部的电路连接。
8、与现有技术相比,本实用新型的有益效果是:该c形臂和g形臂的内走线结构可以用于c形臂和g形臂的走线,由于c形臂又分为嵌套式c形臂和非嵌套式c形臂,g形臂又分为嵌套式g形臂和非嵌套式g形臂,因此该内走线结构同时也可以用于嵌套式c形臂和非嵌套式c形臂、嵌套式g形臂和嵌套式g形臂,解决了外部的走线形式导致的移动不便以及容易造成线缆氧化、磨损、损坏以及繁杂的问题;防止走线受损而造成的安全隐患,从而保障了使用者的使用安全,同时内走线使产品外观更加简洁、美观,避免在移动设备时的不便性。
技术特征:1.一种c形臂和g形臂的内走线结构,该内走线结构可以用于c形臂和g形臂,其特征在于:所述c形臂分为嵌套式c形臂和非嵌套式c形臂,其结构由线缆、线鼓、主体(7)、升降竖柱(8)、滑枕(9)、c臂支架(10)、c臂(15)、球管(12)、平板探测器(14)组成,其中线缆由接头一(1)至接头十(21)组合而成,线鼓包括线鼓一(6-1)至线鼓四(22),c臂(15)由内部c臂(11)和外部c臂(13)构成,且内部c臂(11)与外部c臂(13)固接,并且内部c臂(11)的两端还分别固接有球管(12)与平板探测器(14);所述主体(7)的内部设置有线鼓一(6-1)或线鼓三(17),且线鼓一(6-1)或线鼓三(17)的一端留有接头一(1)或接头六(16),并且接头一(1)或接头六(16)与主体(7)的内部电路连接;所述主体(7)与升降竖柱(8)滑接并在连接处留有走线口,线缆通过该走线口由主体(7)进入升降竖柱(8)的内部,升降竖柱(8)与滑枕(9)滑接并在连接处留有走线口,线缆通过该走线口由升降竖柱(8)进入滑枕(9)的内部,所述滑枕(9)内部的线缆留有接头二(2)或接头七(18),接头二(2)或接头七(18)与滑枕(9)内部的电路连接;滑枕(9)与c臂支架(10)通过轴承转动连接并在连接处留有走线口,线缆通过走线口进入c臂支架(10)的内部,c臂支架(10)内设有线鼓二(6-2)或线鼓四(22),c臂支架(10)内部留有接头三(3)或接头八(19),接头三(3)或接头八(19)与c臂支架(10)内部的电路连接;
2.根据权利要求1所述的一种c形臂和g形臂的内走线结构,其特征在于:所述c形臂中的外部c臂(13)滑接在c臂支架(10)的导轨内并与c臂支架(10)的连接处留有走线口,线缆通过导向滑轮(46)沿外部c臂(13)的腔体向下与外部c臂(13)的一端连接,线缆通过导向滑轮(46)翻折沿内部c臂(11)和外部c臂(13)之间的腔体与内部c臂(11)的两端连接,并留有接头四(4)和接头五(5),接头四(4)与球管(12)内部的电路连接,接头五(5)与平板探测器(14)内部的电路连接。
3.根据权利要求1所述的一种c形臂和g形臂的内走线结构,其特征在于:所述c形臂中的c臂(15)滑接在c臂支架(10)的导轨内并与c臂支架(10)连接处留有走线口,线缆通过导向滑轮(46)沿c臂(15)内部的腔体向下与c臂(15)一端的连接处留有接头九(20),线缆通过导向滑轮(46)翻折,接头九(20)与球管(12)内部的电路连接,通过球管(12)线缆沿c臂(15)正面腔体向上与c臂(15)另一端连接并留有接头十(21),接头十(21)与平板探测器(14)内部的电路连接。
4.根据权利要求1所述的一种c形臂和g形臂的内走线结构,其特征在于:所述g形臂中的第二外部c臂(36)滑接在g臂支架(23)的导轨内与g臂支架(23)连接并留有走线口,线缆分为两股一股从走线口进入第二外部c臂(36),一股通过导向滑轮(46)沿第二外部c臂(36)的腔体向上与第二外部c臂(36)的一端连接并设有接头十七(35),接头十七(35)与第二平板探测器(26)内部的电路连接;另一股通过导向滑轮(46)沿第二外部c臂(36)的腔体向下与第二外部c臂(36)的另一端连接,线缆通过导向滑轮(46)翻折并分为三股线缆,一股的接头十四(32)与第二球管(25)内部的电路连接;另两股线缆通过第二外部c臂(36)上的走线口沿第二内部c臂(24)和第二外部c臂(36)之间的腔体,与第二内部c臂(24)两端连接并留有接头十六(34)和接头十五(33),接头十六(34)与平板探测器(14)内部的电路连接,接头十五(33)与球管(12)内部的电路连接。
5.根据权利要求1所述的一种c形臂和g形臂的内走线结构,其特征在于:所述g形臂中的g臂(45)滑接在g臂支架(23)的导轨内与g臂支架(23)连接并留有走线口,线缆分为两股分别沿走线口进入g臂(45),一股通过导向滑轮(46)沿g臂(45)背部腔体向上与g臂(45)一端连接并设有接头廿四(44),接头廿四(44)与第二平板探测器(26)内部的电路连接;另一股通过导向滑轮(46)沿g臂(45)内部与外部之间的腔体向下到第二球管(25),线缆通过导向滑轮(46)翻折并分为三股线缆,一股与第二球管(25)连接并设有接头廿一(41),接头廿一(41)与第二球管(25)内部的电路连接;另两股分别沿g臂(45)正面腔体与球管(12)和平板探测器(14)相连并留有接头廿二(42)和接头廿三(43),其中接头廿二(42)与球管(12)内部的电路连接,接头廿三(43)与平板探测器(14)内部的电路连接。
技术总结本技术涉及C形臂和G形臂的内走线技术领域,具体为一种C形臂和G形臂的内走线结构,该内走线结构可以用于C形臂和G形臂,所述C形臂分为嵌套式C形臂和非嵌套式C形臂,其结构由线缆、线鼓、主体、升降竖柱、滑枕、C臂支架、C臂、球管、平板探测器组成,所述G形臂分为嵌套式G形臂和非嵌套式G形臂,其结构由线缆、线鼓、主体、升降竖柱、滑枕、G臂支架、G臂、球管、第二球管、平板探测器、第二平板探测器等组成。本技术做到防止外部走线受损而造成的安全隐患,从而保障了使用者的使用安全,同时内走线方便设备在手术室中消毒处理,产品外观更加简洁、美观,避免在移动设备时的不便性。技术研发人员:纪现才受保护的技术使用者:山东康威智能医疗科技有限公司技术研发日:20231222技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240731/176245.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。