一种步进电机的斩波恒流控制电路及其方法与流程
- 国知局
- 2024-07-31 17:49:04
本发明属于电机驱动,尤其涉及一种步进电机的斩波恒流控制电路及其方法。
背景技术:
1、在电机驱动技术领域,步进电机因其精准的位置控制、简单的驱动电路以及在工业、消费电子、医疗设备等领域的广泛应用而备受关注,然而,在实际应用中,步进电机驱动过程存在一些技术挑战。
2、目前,为提高步进电机的运行性能,实现精确控制,行业主要采用经典斩波恒流驱动控制技术,即通过电机驱动芯片对由功率管组成的h桥电路进行控制,通过改变功率管的通断实现对步进电机绕组充放电,具体地,主要由比较器控制h桥电路电流大小,通过dac设置每一步的参考电压值与采样电阻的检测电压相比较,使流过步进电机绕组的电流可以按照设定微步变化,以达到各相绕组的电流微步细分,从而使电机每输入一个阶梯波就旋转一小步,提高步进电机的分辨率,让步进电机运行更加平滑,抖动更小;但由于步进电机在恒流斩波驱动过程中,需要不断地充放电,尤其是在步进电机转速较低时,步进电机绕组线圈充放电频繁,电流纹波较大,其运动过程中可能会产生低频振荡,进而产生噪声,这对于一些对噪声控制要求较高的应用场景,如医疗设备和精密仪器,可能带来不利影响,且在某些对环境噪声要求严格的应用中,这些噪声极可能会影响设备的性能和用户体验。
3、另外,在经典斩波恒流驱动控制中,一次充放电的过程:绕组进行充电,当一定时间后,相电流到达目标值,使得检测电阻上的检测电压达到设定值,充电结束,随后计数器进行清零并开始计数,绕组进行放电,当计数器记满时,进入下一次充电状态,重复循环进行斩波恒流控制;绕组进行充放电过程中,通过控制衰减模式来完成,衰减模式分为三种,即快速衰减模式、慢速衰减模式和混合衰减模式,每种衰减模式下对电流的充放电速度不一样,如直流电机需要加速充电时,一般采用慢速衰减的模式,让电流持续上升;要维持电流水平时,需要进行快速衰减,因此,步进电机进行控制的过程是一个对加速充电和维持电流水平的综合控制,所以一般步进电机进行充放电时,采用混合衰减模式,来保证相电流波动小,同时精确控制电流,图1为经典恒流斩波在混合衰减模式下固定关断时间的相电流的波形图,在完整的一个正弦波周期内,由于绕组实际电流(也就是平均电流)与目标电流总是存在一定误差,这会使得正弦波在过零点区域存在一段为零的时间,如图2所示,这意味着根本没有扭矩,那么在步进电机快速转动时,有可能会造成摆动乃至电机失步;图1中的ton为充电阶段时间,toff为放电关闭时间;图2中的实线为平均电流,虚线为目标电流。
4、进一步的,已有研究尝试通过将比较器更改为滞回比较器,使得在斩波回路中实际电流大于目标电流一定量时,滞回比较器发生翻转,控制h桥电路中功率管通断变化,电机线圈绕组开始放电,检测到实际电流小于目标电流一定量时,触发滞回比较器翻转,电机线圈绕组开始充电,最终绕组电流以设定的目标电流为中心振荡,此方式能够解决设定正弦细分相电流在过零区域存在的过零平台问题,但是由于此方式需要提高斩波频率以缩短充放电时间来抑制纹波,而过高的斩波频率会造成功率管开关性能的损耗以及电机步进时电流台阶切换地不稳定,进而使电机运行过程中发生机械震荡,进一步产生噪音。
5、综上所述,尽管步进电机驱动技术在多个领域有着广泛的应用,但仍然需要进一步研究和创新,以克服电流纹波、低频振荡噪声以及驱动稳定性等方面的挑战,从而满足不同应用场景对步进电机驱动的高要求,鉴于此,本发明针对上述相关问题予以进一步改进。
技术实现思路
1、针对上述问题,本发明提供了一种步进电机的斩波恒流控制电路及其方法,其可有效解决目前步进电机驱动存在过零平台以及难以消除噪声等固有缺陷,实现步进电机在运动过程中平稳低噪声的运行,从而满足不同应用场景要求。
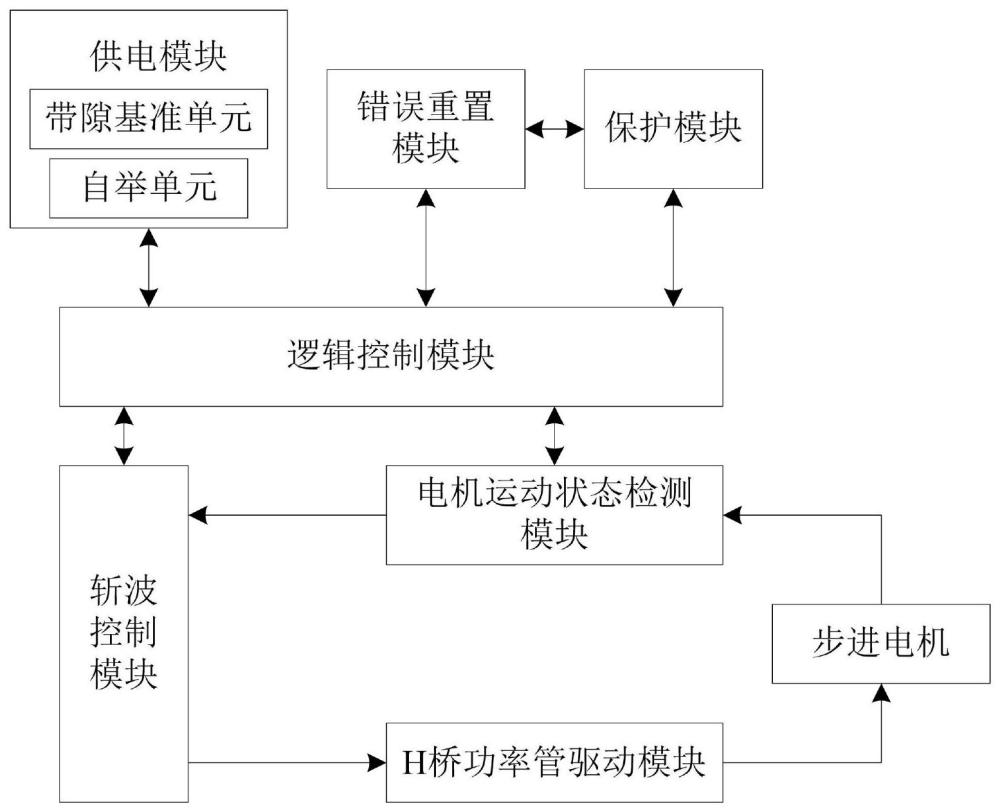
2、本发明采用如下技术方案,一种步进电机的斩波恒流控制电路,包括斩波控制模块、电机运动状态检测模块、h桥功率管驱动模块;所述斩波控制模块包括斩波逻辑控制单元以及若干具有不同门限的滞回比较器、窗口比较器;
3、其中,电机运动状态检测模块,与所述滞回比较器、窗口比较器均相连接,用于实时将步进电机运行状态反馈至所述滞回比较器、窗口比较器;
4、所述斩波逻辑控制单元,用于根据所述滞回比较器、窗口比较器输出的反馈信号进行相应的逻辑控制输出;
5、h桥功率管栅极驱动模块,与所述斩波逻辑控制单元、步进电机均相连接,用于根据逻辑控制输出信号,驱动功率管的通断以实现对步进电机绕组充放电衰减模式的切换,所述衰减模式包括快衰模式、慢衰模式。
6、进一步地,所述控制电路还包括逻辑控制模块、供电模块、错误重置模块、保护模块;其中,所述逻辑控制模块,与所述斩波逻辑控制单元、电机运动状态检测模块均相连接,用于根据步进电机运行状态反馈信号,实现对所述控制电路的工作与停止;
7、所述供电模块,与所述逻辑控制模块连接,用于提供电压;
8、所述错误重置模块,与所述逻辑控制模块连接,用于当所述控制电路出现异常时,对所述逻辑控制模块进行重置;
9、所述保护模块,与所述错误重置模块、逻辑控制模块均相连接,用于实现欠压、过流、过温保护;
10、进一步地,所述斩波控制模块还包括衰减时间计数单元、衰减模式调整单元、比较器选择单元,其中,
11、所述衰减时间计数单元,与所述斩波逻辑控制单元连接,用于对不同衰减模式进行时间计数;
12、所述衰减模式调整单元,与所述斩波逻辑控制单元、衰减时间计数单元均相连接,用于根据所述斩波逻辑控制单元的输出控制实现对衰减模式的切换调整;
13、所述比较器选择单元,与所述衰减模式调整单元、滞回比较器、窗口比较器均相连接,用于实现比较器的选择;
14、一种步进电机的斩波恒流控制方法,包括以下步骤:
15、s1、初始阶段,步进电机绕组开始充电,通过h桥功率管栅极驱动模块驱动,步进电机绕组线圈电流上升;
16、s2、使能滞回比较器,步进电机绕组线圈电流上升直至大于慢衰阈值时,通过h桥功率管栅极驱动模块驱动以使所述步进电机进入慢衰模式,并持续到第一慢衰时间时结束慢衰阶段;
17、s3、通过h桥功率管栅极驱动模块驱动以使所述步进电机进入快衰模式,并使能窗口比较器,步进电机绕组线圈电流快衰至小于快衰阈值时,所述步进电机第二次进入慢衰模式,直到第二慢衰时间结束时,完成一个斩波周期;
18、s4、在下一斩波周期中,逐步调整慢衰阈值、第一慢衰时间、第二慢衰时间后,重复所述步骤s2,直至获得所述步进电机平稳运行相对应的最佳参数。
19、进一步地,所述步骤s2中,所述慢衰阈值为所述斩波逻辑控制单元设定的目标电流值与慢衰门限值之和;
20、进一步地,所述步骤s3中,在快衰模式开始阶段时的所述步进电机绕组线圈电流为所述斩波逻辑控制单元设定的目标电流值与快衰门限值之和;
21、进一步地,所述步骤s3中,所述快衰阈值为所述斩波逻辑控制单元设定的目标电流值与快衰门限值之差;
22、进一步地,所述第一慢衰时间与所述第二慢衰时间之和不小于一个斩波周期的50%;
23、进一步地,所述步骤s3中,进入快衰模式阶段时,所述衰减时间计数单元开始计时,直至所述步进电机第二次进入慢衰模式时,所述衰减时间计数单元停止计时,并将此时记录的时间值作为快衰时间;
24、进一步地,在切换所述步进电机绕组线圈电流到采样电阻上出现电流尖峰的时间段作为消隐时间段,且满足步进电机绕组充电阶段时间与快衰时间均大于所述消隐时间段。
25、本发明的有益效果是,通过改变步进电机衰减过程处于不同模式,并结合步进电机运行状态反馈,通过斩波控制模块控制h桥功率管驱动模块的通断,进而实现衰减开始门限与不同衰减模式衰减时间的自适应调整,以达到步进电机平稳运行下的最佳参数设置,从而能够实现更小的纹波,实现步进电机在高速运动过程中平稳低噪声的运行,增强了驱动电路对于复杂工作情况的自适应能力,具有较好的经济使用价值。
本文地址:https://www.jishuxx.com/zhuanli/20240731/176769.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
行星减速电机的制作方法
下一篇
返回列表