一种基于离散空间矢量的直线感应电机模型预测电流控制方法及系统
- 国知局
- 2024-07-31 17:56:39
本发明属于直线电机控制,更具体地,涉及一种基于离散空间矢量的直线感应电机模型预测电流控制方法及系统。
背景技术:
1、直线感应电机(linear induction machine,lim)起源于旋转感应电机(rotaryinduction machine,rim),无需传动器械可直接进行直线运动。与旋转感应电机相比,直线感应电机驱动系统转弯半径和盾构面积更小,爬坡能力更强,现已在轨道交通、石油开采等领域广泛应用。然而,直线感应电机因为初级铁芯不闭合导致互感在电机动态运行过程中变化剧烈,进而产生更多的电流谐波,恶化系统控制性能。因此,通常将电流作为直线感应电机驱动系统的直接控制目标。模型预测电流控制由于其设计简单、可同时灵活控制多个目标的等优点而被广泛关注。此外,模型预测电流控制的快速动态响应特性与的直线感应电机在某些领域中的应用非常契合。遗憾的是,模型预测电流控制的一些缺点可能会导致推力性能不尽人意,需要进一步改进。
2、传统的模型预测电流控制(model predictive current control,mpcc)方法通常在每个控制周期应用一个电压矢量(voltage vector,vv),这会产生额外的电流谐波和推力波动。为了抑制电流谐波,人们提出了许多基于两个或三个vv的mpcc方法。然而,这种多vv的mpcc方法在每个控制周期的计算量很大。此外,它还可能使计算出的vv动作时间之和超过控制周期,无法实现全局最优控制。为避免这一问题,有人提出了基于调制的模型预测控制(modulation-based model predictive control,mmpc)方法。这些方法的基本原理是假设每个vv的动作时间与其代价函数成反比。虽然许多实验证明了mmpc的有效性,但仍缺乏严格的理论证明。这限制了mmpc的推广和应用。因此,有必要进一步改进。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种基于离散空间矢量的直线感应电机模型预测电流控制方法,旨在解决现有的直线感应电机预测电流控制方法存在的电流谐波高、推力波动大差的问题。
2、为实现上述目的,本发明提供了一种基于离散空间矢量的直线感应电机模型预测电流控制方法,包括以下步骤:
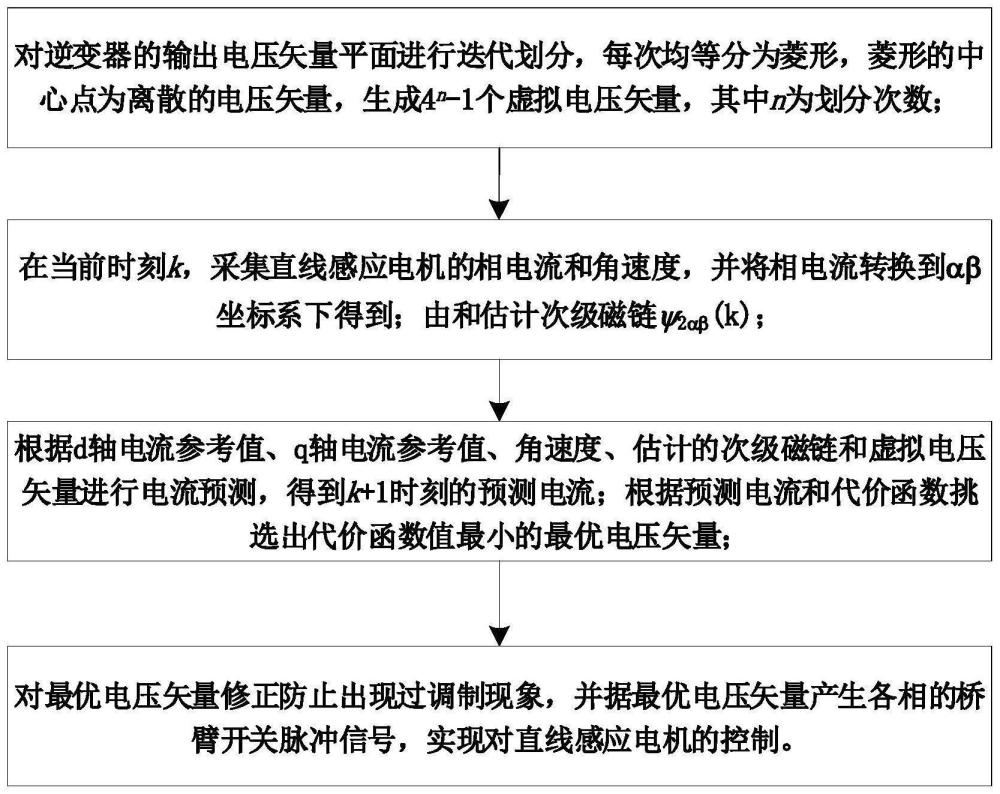
3、(1)对逆变器的输出电压矢量平面进行迭代划分,每次均等分为菱形,菱形的中心点为离散的电压矢量,生成4n-1个虚拟电压矢量,其中n为划分次数;
4、(2)在当前时刻k,采集直线感应电机的相电流和角速度ω2(k),并将相电流转换到αβ坐标系下得到i1αβ(k);由i1αβ(k)和ω2(k)估计次级磁链ψ2αβ(k);
5、(3)根据d轴电流参考值、q轴电流参考值、角速度、估计的次级磁链和虚拟电压矢量进行电流预测,得到k+1时刻的预测电流;根据预测电流和代价函数挑选出代价函数值最小的最优电压矢量;
6、(4)根据最优电压矢量产生各相的桥臂开关脉冲信号,实现对直线感应电机的控制。
7、进一步地,将空间电压矢量视为菱形的中心,即每个菱形的中心对应一个虚拟电压矢量,每个菱形可以分割成4个较小的全等菱形。虚拟电压矢量的总数由划分次数n决定
8、ntotal=4n-1 (n≥1)
9、其中,ntotal是离散的电压矢量总数,n是划分次数。
10、进一步地,选择菱形中心的电压矢量进行电流预测、挑选代价函数最小的电压矢量作为最优电压矢量,每次迭代仅使用菱形中心对应的电压矢量,最终使用的虚拟电压矢量个数是4n-1。
11、进一步地,k+1时刻的预测电流的计算方法为:
12、
13、其中,uαβ=[uα,uβ]τ,i1αβ=[i1α,i1β]τ分别是初级电压和电流;l1=lm+ll1,l2=lm+ll2,ll1和ll2分别是初级和次级漏感,lm是励磁电感;ω2=vπ/τ,为次级角速度;τ是极距,r1和r2是初级和次级电阻。ts为控制周期。
14、进一步地,将预测初级电流值和参考初级电流量差的平方和设计为代价函数g:
15、g=(i1αref-i1α(k+1))2+(i1βref-i1β(k+1))2
16、其中,i1αref和i1βref是初级电流参考值。
17、本发明还提供了一种基于离散空间矢量的直线感应电机模型预测电流控制系统,包括:
18、虚拟电压矢量离散模块,用于对逆变器的输出电压矢量平面进行迭代划分,每次均等分为菱形,菱形的中心点为离散的电压矢量,生成4n-1个虚拟电压矢量,其中n为划分次数;
19、次级磁链计算模块,用于采集直线感应电机的相电流和角速度ω2(k),并将相电流转换到αβ坐标系下得到i1αβ(k);由i1αβ(k)和ω2(k)估计次级磁链ψ2αβ(k);
20、最优电压矢量选定模块,用于根据d轴电流参考值、q轴电流参考值、角速度、估计的次级磁链和虚拟电压矢量进行电流预测,得到预测电流;根据预测电流和代价函数挑选出代价函数值最小的最优电压矢量;
21、直线感应电机控制模块,用于根据最优电压矢量产生各相的桥臂开关脉冲信号,实现对直线感应电机的控制。
22、通过本发明所构思的以上技术方案,与现有技术相比,能够取得以下
23、有益效果:
24、(1)本发明提出了一种基于离散空间矢量的直线感应电机模型预测电流控制方法,将空间电压矢量视为菱形的中心,即将每个菱形的中心对应一个电压矢量,相较传统的模型预测电流控制,该方法提供了更多的电压矢量选择;
25、(2)本发明提供的基于离散空间矢量的直线感应电机模型预测电流控制方法,针对传统的模型预测电流控制应用于直线感应电机时存在的电流谐波和推力波动大的问题,将离散的电压矢量通过菱形区域划分、比较寻优等方法,不仅减少了在线寻优的电压矢量个数,减轻了计算负担,还提高了直线感应电机的稳态控制性能。
技术特征:1.一种基于离散空间矢量的直线感应电机模型预测电流控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于离散空间矢量的直线感应电机模型预测电流控制方法,其特征在于,所述步骤(1)中,对逆变器的输出电压矢量平面进行第一次划分,划分为3个菱形,将电压矢量视为菱形的中心,即每个菱形的中心对应一个虚拟电压矢量,每个菱形可以分割成4个全等菱形;进行迭代划分,虚拟电压矢量的总数由划分次数n决定
3.根据权利要求2所述的基于离散空间矢量的直线感应电机模型预测电流控制方法,其特征在于,所述步骤(3)中选择菱形中心的电压矢量进行电流预测,将预测电流带入代价函数并挑选代价函数最小的电压矢量作为最优电压矢量,每次迭代仅使用菱形中心对应的电压矢量,最终使用的虚拟电压矢量个数是4n-1。
4.根据权利要求1所述的基于离散空间矢量的直线感应电机模型预测电流控制方法,其特征在于,k+1时刻的预测电流的计算方法为:
5.根据权利要求1所述的基于离散空间矢量的直线感应电机模型预测电流控制方法,其特征在于,所述代价函数为:
6.一种基于离散空间矢量的直线感应电机模型预测电流控制系统,其特征在于,包括:
7.根据权利要求6所述的基于离散空间矢量的直线感应电机模型预测电流控制系统,其特征在于,所述虚拟电压矢量离散模块中,对逆变器的输出电压矢量平面进行第一次划分,划分为3个菱形,将电压矢量视为菱形的中心,即每个菱形的中心对应一个虚拟电压矢量,每个菱形可以分割成4个全等菱形;进行迭代划分,虚拟电压矢量的总数由划分次数n决定
8.根据权利要求7所述的基于离散空间矢量的直线感应电机模型预测电流控制系统,其特征在于,所述最优电压矢量选定模块中选择菱形中心的电压矢量进行电流预测,将预测电流带入代价函数并挑选代价函数最小的电压矢量作为最优电压矢量,每次迭代仅使用菱形中心对应的电压矢量,最终使用的虚拟电压矢量个数是4n-1。
9.根据权利要求6所述的基于离散空间矢量的直线感应电机模型预测电流控制系统,其特征在于,k+1时刻的预测电流的计算方法为:
10.根据权利要求6所述的基于离散空间矢量的直线感应电机模型预测电流控制系统,其特征在于,所述代价函数为:
技术总结本发明公开了一种基于离散空间矢量的直线感应电机模型预测电流控制方法及系统,属于直线电机控制领域,方法包括:根据两电平电压矢量平面结构设计电压矢量离散方法,根据迭代划分次数n,可生成4<supgt;n</supgt;‑1个虚拟电压矢量;采样电机相电流和位置信号并利用位置信号计算速度信号;根据电流预测模型和代价函数设计最优电压矢量搜寻方法,减少在线评估电压矢量个数,缩减计算量。根据最优电压矢量产生各相的桥臂开关脉冲信号,实现对直线感应电机的控制。本发明可以实现对直线感应电机的准确控制,降低直线感应电机的电流谐波,降低推力波动。技术研发人员:徐伟,肖晗,葛健,唐一融,廖凯举,郭颖聪,上官用道,成思伟受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/177368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表