一种基于PID的电机控制方法与流程
- 国知局
- 2024-07-31 18:01:31
本发明涉及电机控制,具体涉及一种基于pid的电机控制方法。
背景技术:
1、在现代工业和自动化控制系统中,电机作为动力源的核心组件,其性能的稳定与高效运行至关重要。电机在运行过程中会产生热量,而温度的升高会对电机的性能和寿命产生显著影响。因此,对电机的温度进行有效控制是确保系统可靠性和效率的关键因素之一。
2、pid(比例-积分-微分)控制是一种广泛应用于工业控制领域的反馈控制策略,它通过调整控制器的输出以减小系统的误差。pid控制器因其结构简单、稳定性好和易于调节等优点而被广泛采用。然而,标准的pid控制模型不考虑温度变化对电机性能的影响,这可能导致在高温环境下电机性能下降或损坏。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于pid的电机控制方法解决了现有pid控制模型不考虑温度变化对电机性能的影响,导致在高温环境下电机性能下降或损坏的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于pid的电机控制方法,包括以下步骤:
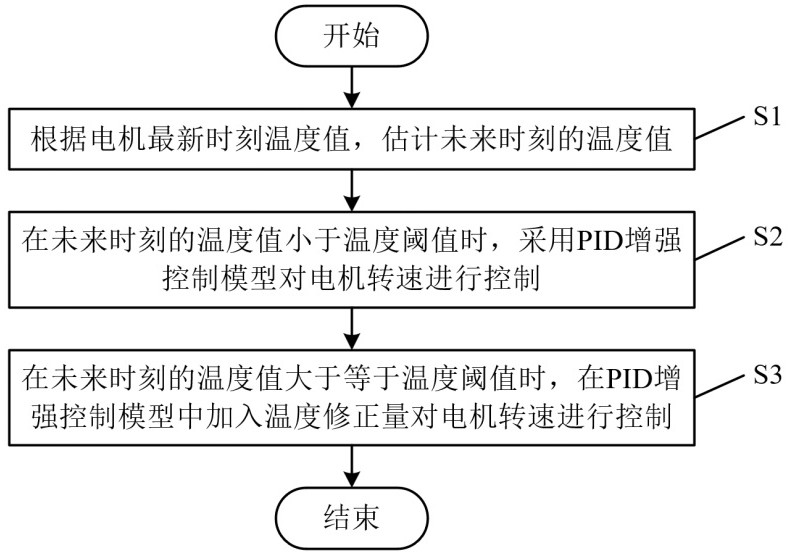
3、s1、根据电机最新时刻温度值,估计未来时刻的温度值;
4、s2、在未来时刻的温度值小于温度阈值时,采用pid增强控制模型对电机转速进行控制;
5、s3、在未来时刻的温度值大于等于温度阈值时,在pid增强控制模型中加入温度修正量对电机转速进行控制。
6、本发明的有益效果为:本发明在预测到未来时刻温度值低于设定的温度阈值时,采用pid增强控制模型对电机转速进行控制。通过对现有pid进行增强,以提高响应速度。在预测到的未来时刻温度值高于或等于温度阈值时,在pid增强控制模型中加入温度修正量,用于降低pid增强控制模型的输出,减小电机转速,等待温度下降,延长电机使用寿命,并提升电机整个自动化系统的稳定性和可靠性,解决现有pid控制模型不考虑温度变化对电机性能的影响,导致在高温环境下电机性能下降或损坏的问题。
7、进一步地,所述s1包括以下分步骤:
8、s11、采集电机温度值,构建电机温度序列;
9、s12、根据电机温度序列,计算温度攀升速度;
10、s13、根据温度攀升速度和电机最新时刻温度值,基于温度估计模型,估计未来时刻的温度值。
11、上述进一步地方案的有益效果为:本发明通过持续采集电机的温度值,构建电机温度序列,根据电机温度序列,计算温度攀升速度,结合温度攀升速度和电机最新时刻温度值,对未来时刻的温度值进行估计,可以实时监控电机的工作状态,及时发现电机是否存在过热的风险。
12、进一步地,所述s12中计算温度攀升速度的公式为:
13、,
14、其中,αt为第t时刻的温度攀升速度,ττ+1为电机温度序列中第τ+1时刻采集的温度值,ττ为电机温度序列中第τ时刻采集的温度值,τt为电机温度序列中第t时刻采集的温度值,第t时刻为最新时刻,τt-1为电机温度序列中第t-1时刻采集的温度值,t为电机温度序列的长度,τ为正整数。
15、上述进一步地方案的有益效果为:本发明综合电机温度序列中整体温度变化情况,以及最新时刻的温度变化情况,得到温度攀升速度,从而避免噪声干扰,提高计算温度攀升速度的精度。
16、进一步地,所述s13中温度估计模型的表达式为:
17、,
18、,
19、,
20、其中,tf为未来时刻的温度值,n为未来时刻的长度,wα为温度攀升速度αt的权重,bα为温度攀升速度αt的偏置,wt为温度值τt的权重,bt为温度值τt的偏置,h1为第一温度系数,h2为第二温度系数,wh1为第一温度系数h1的权重,wh2为第二温度系数h2的权重,sigmoid为激活函数。
21、上述进一步地方案的有益效果为:本发明采用激活函数分别对温度攀升速度αt和温度值τt赋予权重,实现综合考虑温度值τt和温度攀升速度αt,提高未来时刻的温度值的预测精度。
22、进一步地,所述s2中pid增强控制模型包括:pid控制单元和增强单元;
23、所述pid控制单元用于根据电机目标转速与电机实际转速的速度差值,基于pid算法,得到初始执行量;
24、所述增强单元用于对初始执行量进行增强处理,得到增强执行量,采用增强执行量对电机转速进行控制。
25、进一步地,所述增强单元的表达式为:
26、,
27、其中,为第k次控制的增强执行量,u(k)为第k次控制的初始执行量,e(k)为第k次控制对应的电机目标转速与电机实际转速的速度差值,μ为比例系数,e为自然常数。
28、上述进一步地方案的有益效果为:在电机目标转速大于电机实际转速时,速度差值e(k)大于0,在初始执行量基础上,增加执行量,使得电机转速的控制量进一步地增加,使得电机实际转速快速逼近电机目标转速;在电机目标转速小于电机实际转速时,速度差值e(k)小于0,在初始执行量基础上,减少执行量,使得电机转速的控制量进一步地减少,使得电机实际转速快速逼近电机目标转速,在电机目标转速等于电机实际转速时,初始执行量等于增强执行量。
29、进一步地,所述s3包括以下分步骤:
30、s31、在未来时刻的温度值大于等于温度阈值时,根据电机最新时刻温度值与温度阈值,计算第一温度差距;
31、s32、根据未来时刻的温度值与温度阈值,计算第二温度差距;
32、s33、根据第一温度差距,计算第一修正系数;
33、s34、根据第二温度差距,计算第二修正系数;
34、s35、根据第一修正系数和第二修正系数,计算温度修正量;
35、s36、对pid增强控制模型输出的增强执行量加入温度修正量,得到修正执行量;
36、s37、采用修正执行量对电机转速进行控制,在未来时刻的温度值小于温度阈值时,恢复pid增强控制模型对电机转速的控制。
37、进一步地,所述s31中计算第一温度差距的公式为:
38、,
39、其中,d1为第一温度差距,t为电机最新时刻温度值,tth为温度阈值;
40、所述s32中计算第二温度差距的公式为:
41、,
42、其中,d2为第二温度差距,tf为未来时刻的温度值。
43、进一步地,所述s33中计算第一修正系数的公式为:
44、,
45、其中,γ1为第一修正系数,| |为绝对值运算;
46、所述s34中计算第二修正系数的公式为:
47、,
48、其中,γ2为第二修正系数。
49、进一步地,所述s35中计算温度修正量的公式为:
50、,
51、其中,r为温度修正量;
52、所述s36中得到修正执行量的公式为:
53、,
54、其中,g(k)为第k次控制的修正执行量。
55、上述进一步地方案的有益效果为:在未来时刻的温度值大于等于温度阈值时,电机最新时刻温度值大于等于温度阈值时,温度过高,第一修正系数和第二修正系数均大于0,对增强执行量削弱能力最强,使得速度快速下降,防止电机损坏;在未来时刻的温度值大于等于温度阈值时,电机最新时刻温度值小于温度阈值时,第二修正系数大于0,根据第二修正系数大小,降低执行量,从而保障电机安全。
本文地址:https://www.jishuxx.com/zhuanli/20240731/177645.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表