一种路侧泊位停车状态检测方法及装置与流程
- 国知局
- 2024-07-31 20:32:45
本发明涉及智能车辆监测,尤其涉及一种路侧泊位停车状态检测方法及装置。
背景技术:
1、近几年随着社会的发展,人们随着机动车保有量的快速增长,对停车的需求日益提高,对于路侧泊位,市面上常见的车辆监测设备包括路内无线视频桩、路牙机等,其中,通过激光雷达探测泊位内物体的距离来确认泊位内是否有车,对泊位内车辆牌号进行拍摄,实现自动停车计费;
2、但是,在以下方面:
3、激光雷达往往采用单点测距激光雷达,容易受到恶劣天气(如:浓雾、雨雪天气)的影响,造成探测到的距离误差较大,且单点测距激光雷达无法准确区分泊位上物体的类别(如:机动车、非机动车、人等),进而导致泊位状态判断有误,造成摄像机误抓拍次数增多,车主投诉增多;
4、激光雷达对比毫米波雷达来说,其运行功耗大于毫米波雷达,且无法直接测算雷达对于目标点的径向速度;
5、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的在于:提出一种路侧泊位停车状态检测方法及装置,通过毫米波雷达探测器对待测泊位进行探测,利用待测泊位的能量值来确定待测泊位的泊位状态,提高了对泊位状态判断的精确度,解决了路侧停车由于泊位状态判导致摄像机误抓拍等的问题。
2、为了实现上述目的,本发明采用了如下技术方案:一种路侧泊位停车状态检测方法,包括以下步骤:
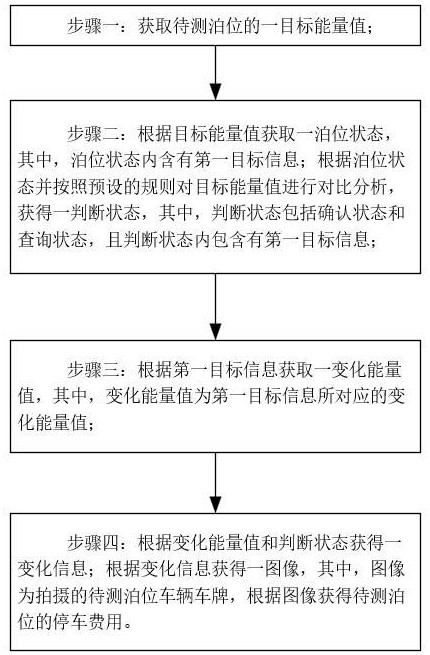
3、步骤一:获取待测泊位的一目标能量值;
4、步骤二:根据目标能量值获取一泊位状态,其中,泊位状态内含有第一目标信息;根据泊位状态并按照预设的规则对目标能量值进行对比分析,获得一判断状态,其中,判断状态包括确认状态和查询状态,且判断状态内包含有第一目标信息;
5、步骤三:根据第一目标信息获取一变化能量值,其中,变化能量值为第一目标信息所对应的变化能量值;
6、步骤四:根据变化能量值和判断状态获得一变化信息;根据变化信息获得一图像,其中,图像为拍摄的待测泊位车辆车牌,根据图像获得待测泊位的停车费用。
7、进一步的,步骤一具体的工作过程为:
8、设置一组雷达探测器的探测周期,记录雷达3.5米内泊位上等距离间隔下的回波信号,对回波信号进行筛选处理,再对筛选后的信号数据赋予相应的权重系数,生成对应的目标能量值。
9、进一步的,对目标能量值进行对比分析的具体工作过程为:
10、设置待测泊位的目标能量值的第一对比阈值、第二对比阈值和第三对比阈值,并将待测泊位的目标能量值与预先设定的第一对比阈值、第二对比阈值和第三对比阈值进行比较分析:
11、ⅰ,当泊位状态为未知状态时:
12、当待测泊位的目标能量值大于预先设定的第一对比阈值时,则生成确认信号,此时判断状态进入确认状态;当待测泊位的目标能量值小于预先设定的第一对比阈值时,则生成查询信号,此时判断状态进入查询状态;
13、ⅱ,当泊位状态为有车状态时:
14、当待测泊位的目标能量值小于预先设定的第二对比阈值时,则生成确认信号,此时判断状态进入确认状态;当待测泊位的目标能量值大于预先设定的第二对比阈值时,则生成查询信号,此时判断状态进入查询状态;
15、ⅲ,当泊位状态为无车状态时:
16、当待测泊位的目标能量值大于预先设定的第二对比阈值时,则生成确认信号,此时判断状态进入确认状态;当待测泊位的目标能量值小于预先设定的第二对比阈值时,则生成查询信号,此时判断状态进入查询状态。
17、进一步的,获得一变化信息的具体工作过程为:
18、步骤a1,获取判断状态下的第一目标信息,第一目标信息为待测泊位的探测周期:当判断状态为确认状态时,探测周期为每间隔2秒对待测泊位进行探测且探测次数循环5次;当判断状态为查询状态时,探测周期为每间隔20秒对待测泊位进行探测;
19、步骤a2,获取待测泊位上的所有变化能量值,变化能量值为第一目标信息下雷达检测泊位时反馈的相同距离间隔下的能量值,并将待测泊位上所有的变化能量值与预先设定的第一对比阈值、第二对比阈值和第三对比阈值进行比较分析,判断泊位状态是否发生变化,进而分析判断状态是否发生改变:
20、步骤a2-1,当判断状态为确认状态时:若泊位状态发生变化,记录当前的能量值;若泊位状态没有发生变化,则生成查询信号,判断状态发生改变;
21、a2-2,当判断状态为查询状态时:若泊位状态发生变化,记录当前的能量值;若泊位状态没有发生变化,保持当前状态为查询状态;
22、a3,获取泊位状态发生变化时的所有能量值,并将能量值标记为a,同时编辑变化字符,且将a和变化字符进行结合生成变化信息;
23、其中,判断泊位状态是否发生变化的具体分析过程为:
24、s①,当泊位状态为未知状态时,将变化能量值与第一对比阈值进行比较:当所有变化能量值均大于第一对比阈值时,则泊位状态发生变化,判定泊位有车;当变化能量值均小于第一对比阈值时,则判定泊位无车;
25、s②,当泊位状态为有车状态时,将目标能量值与第二对比阈值:当所有变化能量值均小于第二对比阈值时,则泊位状态发生变化,判定泊位无车;当所有变化能量值均大于第二对比阈值时,则泊位状态没有发生变化,判定泊位有车;
26、s③,当泊位状态为无车状态时,将变化能量值与第三对比阈值进行比较:当所有变化能量值均大于第三对比阈值时,则泊位状态发生变化,判定泊位有车;当所有变化能量值均小于第三对比阈值时,则泊位状态没有发生变化,判定泊位无车。
27、进一步的,当判定待测泊位的泊位状态发生变化时:
28、步骤sa,启动摄像机,进行图像抓拍,获得待测泊位的车辆车牌,进而记录车辆驶离时刻或者车辆驶入时刻;
29、步骤sb,将当前待测泊位的泊位状态、变化信息以及车驶离时刻和车驶入时刻发送至云端平台,云端平台进行停车费用的结算。
30、进一步的,泊位状态刚进入有车状态时:
31、启动另一组雷达探测器,通过发射毫米波对车辆的泊车状态进行监测,以车辆驾驶台作为参考原点,规定x轴指向车辆右身,y 轴指向车头,z轴垂直于车体表面向上,建立车辆局部坐标系;以此获取停泊距离、停泊速度停泊角度,辅助车主进行停车;还设置目标泊位的阈值范围,当车辆运动到目标泊位的阈值范围之内时,控制停止该雷达探测器。
32、进一步的,一种路侧泊位停车状态的检测装置,包括毫米波雷达探测器、摄像头传感器、rc振荡定时器、通信模组和电池模块;所述毫米波雷达探测器设置有两组,一组用于发送探测雷达波以检测泊位状态,另一组用于发送探测雷达波以辅助车主进行泊车;所述rc振荡定时器用于计算毫米波雷达探测器的雷达探测间隔;所述摄像头传感器用于根据所述泊位状态拍摄泊位车辆车牌;所述通信模组用于将拍摄图像上传至云端以及将泊车状态发送泊车状态给车主。
33、综上所述,由于采用了上述技术方案,本发明的有益效果是:
34、本发明采用的是毫米波雷达探测器,简单时效性好,并且毫米波不会受到光照天气等因素的影响,还可以直接获得物体的距离、速度信息进而实现对车主停车的辅助;
35、通过设置毫米波雷达探测器,对待测泊位进行能量值探测,大大降低了设备成本;并根据能量值以精确判断泊位状态是否有车,在此过程中,通过对变化能量值的分析以分析泊位状态的改变,进而适应性地更新装置的判断状态,降低了运行功耗;当泊位状态发生变化时,才启动摄像机进行拍照识别,以减小摄像机启动次数,从而节省电池电量,减少更换电池次数,降低运营成本;且当泊位状态刚进入有车状态时,还通过控制另一组毫米波雷达探测器获取泊车状态,对车主进行辅助停车,起到准确判定停车费用的效果,从而减少车主投诉,避免误判导致的费用流失。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186803.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表