一种道路检测区域确定及交通流量检测方法及系统
- 国知局
- 2024-07-31 20:44:43
本发明属于道路车辆流量检测,具体涉及一种道路检测区域确定及交通流量检测方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着人、车交通量日益增长,城市道路越来越多,智能交通已成为道路发展的必然趋势,交通规划、设计和管理也变得越发重要。
3、多类型交通量,包括车道的交通量和行人、自行车过街流量为交通规划、道路建设和交通控制等提供必要的数据。传统的多类型交通量检测方法主要依赖于环形探测器和摄像头,其适用条件较高,得出数据较粗糙,逐渐不能满足现在交通体系发展的需要。
4、随着激光雷达传感器在其他领域的广泛应用,由于其具有分辨率高,不受天气、光线等因素的影响的优点,使人们开始致力于从激光雷达中获取车辆与行人的轨迹。
5、现如今,由于遮挡问题和传感器探测范围的限制,激光雷达传感器应用在道路流量检测上还有存在不准确,轨迹数据容易受影响的问题。
技术实现思路
1、本发明为了解决上述问题,提出了一种道路检测区域确定及交通流量检测方法及系统,本发明解决了现有技术中由于遮挡和传感器探测范围的限制,轨迹数据存在缺陷,导致无法从轨迹数据提取出交通量的问题。
2、根据一些实施例,本发明采用如下技术方案:
3、一种道路检测区域确定方法,包括以下步骤:
4、对获取目标道路的激光雷达数据进行预处理,得到道路数据;
5、基于所述道路数据,基于激光雷达传感器的检测范围和路段或交叉路口的特征,沿交通车道设置有效数据区域;
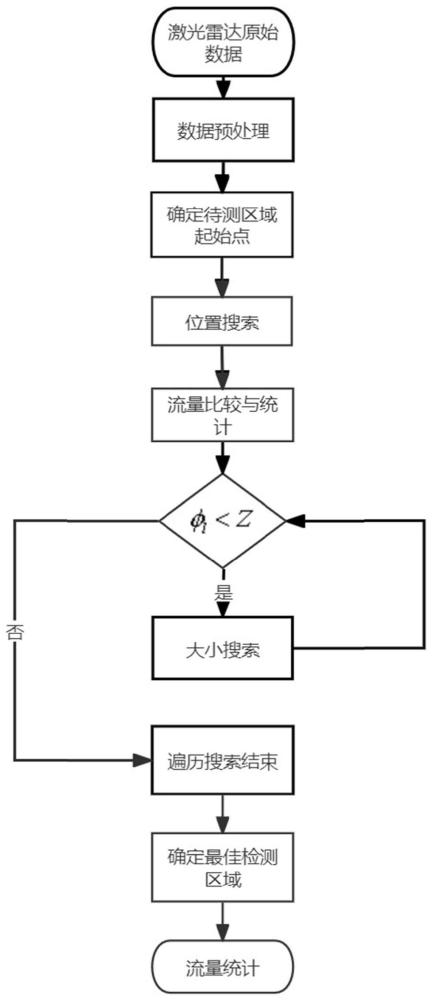
6、将有效数据区域划分为多个检测区域,在每个检测区域,将各检测区域计算出的轨迹数和设置的假定真实流量进行比较,以预设的目标函数,采用自动遍历搜索方法,在各个检测区域内进行搜索,直到满足停止条件,确定最佳检测区域。
7、作为可选择的实施方式,目标道路的激光雷达数据通过在目标道路路口或原定检测区域上设置激光雷达传感器得到。
8、作为可选择的实施方式,进行预处理的具体过程包括:
9、利用基于激光点空间分布的自动背景过滤方法对获取的数据进行过滤,使用不同的点密度阈值剔除距离获取数据中心不同距离的背景,保留道路使用者数据;
10、通过搜索半径和最小点数对道路使用者的激光雷达点进行聚类;
11、将属于同一物体的激光雷达点分组并识别为一个物体,逐帧跟踪该物体;
12、根据道路几何形状、车道数和车道宽度,利用遍历搜索法检测每条车道的边界。
13、作为可选择的实施方式,沿交通车道设置有效数据区域的具体过程包括:
14、基于道路数据的确定:对于机动车道,根据车道的实际边界确定有效数据区域的起点和终点,根据实际车道宽度确定有效数据区域的宽度;对于非机动车道,起点为非机动车道的起点,终点为非机动车道的终点;
15、基于路段或交叉路口的特征的确定:所述有效数据区域设置于车道的分流点之后;
16、基于激光雷达传感器的检测范围的确定:起始点为车辆进入传感器检测范围时的点,终点为车辆行驶方向上的第一个交叉点,如果该车道上没有交叉点,则终点为汇合点,如果没有交叉点或汇合点,终点就是车辆离开检测范围的点;
17、综合上述方面,得到最终确定的有效数据区域。
18、作为可选择的实施方式,将有效数据区域划分为多个检测区域的具体过程包括:起点开始,按照设定长度,土地宽度为宽度,从有效数据区域的起点到终点进行搜索,每隔设定长度设置一个检测区域。
19、作为可选择的实施方式,采用自动遍历搜索方法,在各个检测区域内进行搜索的过程中:
20、以x为当前检测区域的长度,y为相应检测区域的轨迹数建立坐标系,将数据的第一个转折点作为假定真实流量;
21、将各检测区域对应的设定时间内的轨迹数作为流量,对比所述流量和假定真实流量,若假定真实流量小于等于流量时,为第一状态,否则,为第二状态,记录第一状态的检测区域数量,当所述数量达到设定阈值时,停止遍历搜索过程。
22、作为可选择的实施方式,所述目标函数为选择轨迹数的平均百分比误差最小,平均百分比误差为所有检测区域的轨迹数和假定真实流量的误差,与假定真实流量的比值之和的平均数。
23、作为可选择的实施方式,所述假定真实流量根据阈值学习得到。
24、一种道路交通流量检测方法,采用上述道路检测区域确定方法确定的最佳检测区域为最终的激光雷达传感器设置区域,利用在所述最佳检测区域布设的激光雷达传感器进行数据采集,基于采集的数据,计算得到道路交通流量。
25、一种道路检测区域确定系统,包括:
26、预处理模块,被配置为对获取目标道路的激光雷达数据进行预处理,得到道路数据;
27、有效区域确定模块,被配置为基于所述道路数据,基于激光雷达传感器的检测范围和路段或交叉路口的特征,沿交通车道设置有效数据区域;
28、优化模块,被配置为将有效数据区域划分为多个检测区域,在每个检测区域,将各检测区域计算出的轨迹数和设置的假定真实流量进行比较,以预设的目标函数,采用自动遍历搜索方法,在各个检测区域内进行搜索,直到满足停止条件,确定最佳检测区域。
29、一种道路交通流量检测系统,包括:
30、预处理模块,被配置为对获取目标道路的激光雷达数据进行预处理,得到道路数据;
31、有效区域确定模块,被配置为基于所述道路数据,基于激光雷达传感器的检测范围和路段或交叉路口的特征,沿交通车道设置有效数据区域;
32、优化模块,被配置为将有效数据区域划分为多个检测区域,在每个检测区域,将各检测区域计算出的轨迹数和设置的假定真实流量进行比较,以预设的目标函数,采用自动遍历搜索方法,在各个检测区域内进行搜索,直到满足停止条件,确定最佳检测区域;
33、激光雷达传感器,设置区域,用于数据采集;
34、处理模块,被配置为基于采集的数据,计算得到道路交通流量。
35、与现有技术相比,本发明的有益效果为:
36、(1)本发明克服了路边激光雷达检测交通量中的遮挡问题和传感器探测范围的限制,可使路边激光雷达在探测出来的最佳检测区域获取道路使用者的完整轨迹数据,为处理大规模数据和实时交通量提供基础。
37、(2)本发明利用路边激光雷达数据提取基于车道和人行横道的多类型交通量,将极大地改变交通机构评估路网性能的方式,并为现有的探测车辆数据和人群资源数据增添巨大的交通价值。
38、(3)本发明计算基于车道的交通量,提出了检测区域的起点和终点的定义,可在任意有无信号管制、人行通道的路口进行应用。
39、(4)本发明运用阈值学习计算出用于比较的真实流量,以决定何时停止搜索,缩短自动搜索时间,更快的确定最佳检索区域。
40、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。