一种弯道路段容许速度预测系统及方法
- 国知局
- 2024-07-31 21:14:05
本发明涉及车辆安全预警,特别涉及一种弯道路段容许速度预测系统及方法。
背景技术:
1、弯道路段作为事故高发路段,常出现侧滑、侧翻等交通事故。据调查数据统计,弯道路段的事故率是平直路段的两到三倍,造成事故的主要原因是速度控制不当。车辆在弯道路段受到的重力和离心力均会对行驶稳定性产生不良影响,行驶过程中,重力分力导致车速过快,车辆所受的横向力过大,驾驶员常采取非紧急制动操作控制车速,该操作会引起车辆荷载和横向力系数的动态变化。在组合制动和转弯操作下,车辆可能会无法适时停车或因横向力降低而横向失稳。尽管有研究表明,非紧急制动操作引起的横向摩阻系数降低可能会导致车辆侧滑或侧翻,但是其影响程度尚未明确。弯道路段的容许速度确定一直是道路安全研究者和管理者关注的重点,目前常采用实地试验法、仿真试验补充实地调查法以及基于车辆模型的理论推导方法。现有研究主要存在两方面不足,一方面,弯道路段非紧急制动操作引起的轮胎与路面摩擦系数动态变化对车辆横向稳定性的影响程度尚未明确;另一方面,容许速度确定过程中缺乏对车辆纵向和横向安全控制因素的综合考虑;所以无法针对不同的弯道路段,给予合理的建议车速,让车辆既安全又高效地通过弯道路段。
技术实现思路
1、本发明目的就在于为了解决上述的问题,而提供一种弯道路段容许速度预测系统及方法。
2、为实现上述目的,本发明采取的技术方案为:预测系统包括路侧模块和车载模块,
3、路侧模块中包括路侧信息采集模块、路侧定位模块和路侧信息通讯模块,其中路侧信息采集模块用于采集所述弯道路段的几何参数;路侧定位模块,用于采集弯道路段gps位置信息;路侧信息通讯模块分别与路侧信息采集模块、路侧定位模块和车载通信模块连接,用于将道路几何设计参数和弯道路段gps位置信息传输至所述车载模块;
4、车载模块,包括车载信息采集模块、车载定位模块、数据处理模块和信息发布模块,其中车载信息采集模块,用于采集车辆特征参数、车辆速度;车载定位模块,用于采集车辆在路网所处gps位置信息;车载信息通讯模块,用于接收所述路侧信息通讯模块传输的信息;数据处理模块,用于将所述车载模块中的数据信息输入容许速度计算模型并得到计算结果;信息发布模块,用于将所述数据处理模型处理的信息以声音或影像等形式显示。
5、进一步地,路侧信息通讯模块和车载信息通讯模块为互相匹配的无线通讯模块。
6、进一步地,路侧单元安装在路侧交通标志牌横臂或立柱上。
7、进一步地,车载数据处理模块为单片机系统。
8、进一步地,信息发布模块为蓝牙外接智能设备、车载导航设备、汽车仪表板显示装置、外接到汽车仪表盘上的显示装置、通过外接增强现实ar设备将车速引导信息以虚拟形式显示到汽车的前挡风玻璃上的显示装置中的任一种
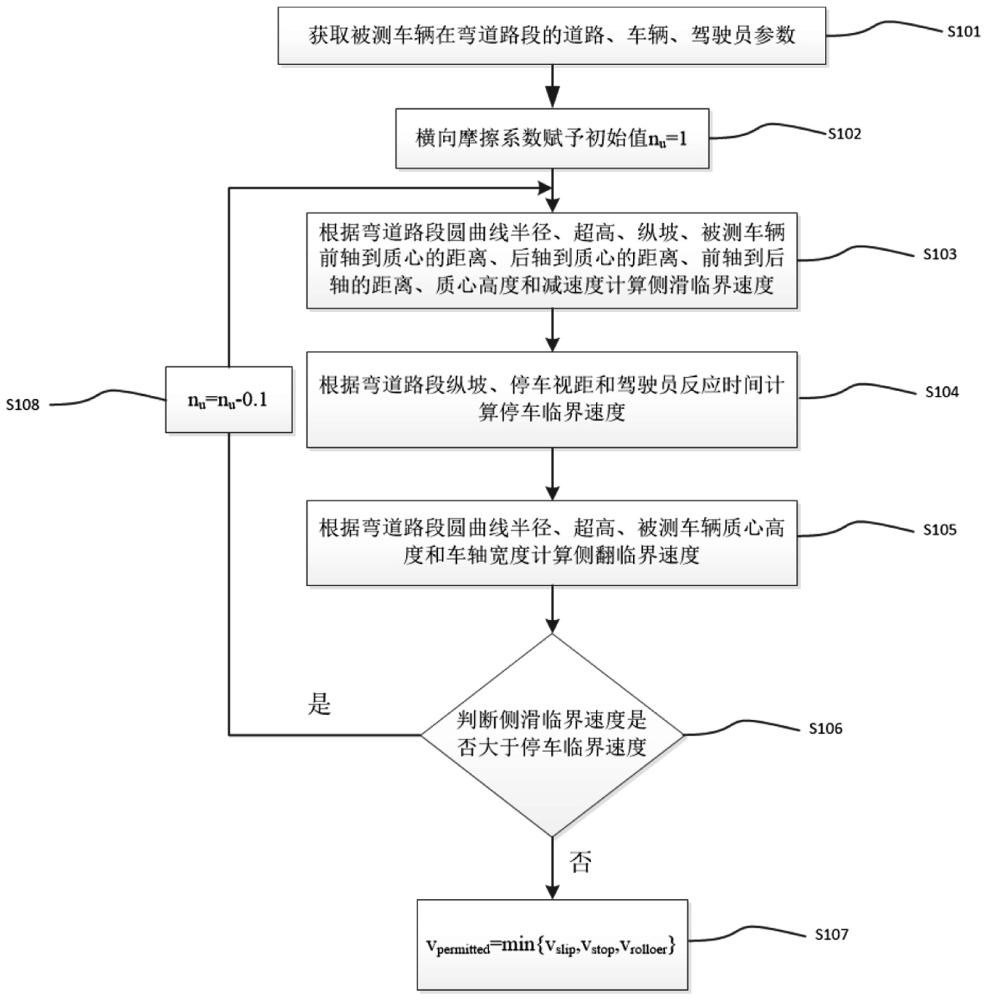
9、进一步地,将路侧信息采集模块和车载信息采集模块的信息输入容许速度预测模型中,计算出容许速度,通过信息发布模块辅助驾驶员或无人驾驶车辆安全通过弯道路段,具体包括如下步骤:
10、s1:路侧定位模块采集所述路侧模块所在弯道路段gps位置信息,获得弯道gps位置坐标为(xr,yr);
11、s2:路侧信息采集模块采集所述弯道路段的圆曲线半径r、纵坡i、超高e和停车视距sstop;
12、s3:路侧信息通讯模块将所述弯道gps位置坐标(xr,yr)、圆曲线半径r、纵坡i、超高e和停车视距sstop传输给所述车载模块;
13、s4:车载信息采集模块,用于采集车辆质量m、质心高度h、质心到前轴的距离a、质心到后轴的距离b、前轴到后轴的距离l、车轴宽度t、侧倾重心高度hr、侧倾率rφ、速度v、减速度ax和驾驶员反应时间t;
14、s5:车载定位模块获取车辆所在gps位置坐标(xc,yc);
15、s6:数据处理模块将所述车载模块中的数据信息进行处理,根据弯道路段容许速度预测方法计算容许速度。
16、其中,弯道路段容许速度预测包括如下步骤:
17、s601:建立改进的稳态单轨模型运动方程:
18、
19、其中,fxf表示车辆前轴在x轴方向的受力,n;fxr表示车辆后轴在x轴方向的受力,n;m表示车辆质量,kg;ax表示x轴方向的减速度,m/s2;g表示重力加速度,m/s2;i是道路纵向坡度,下坡为正;fyf表示车辆前轴在y轴方向的受力,n;fyr表示车辆后轴在y轴方向的受力,n;v表示车辆行驶速度,km/h;r表示圆曲线半径,m;e表示超高值;nf、nr分别表示前、后轴所受的法向力,n。
20、s602:量化非紧急制动作用下轮胎与路面摩擦系数动态变化特征:
21、前、后轴横向摩擦系数fyf、fyr:
22、
23、前、后轴纵向摩擦系数fxf、fxr:
24、
25、s603:计算潮湿路面最大纵向摩擦系数fx,max:
26、fx,max=1.51×10-5v2-4.85×10-3v+0.59 (4)
27、s604:根据摩擦椭圆得到纵、横向摩擦系数的关系:
28、
29、s605:计算最大横向摩擦供给fy,max:
30、fy,max=0.925fx,max (6)
31、s606:确定摩擦系数分配方法:
32、fy可用=nufy,max (7)
33、其中,fy可用表示横向摩擦系数可用值;nu表示横向摩擦系数利用率,%/100。
34、s607:计算横向摩擦裕度fym,量化非紧急制动操作对车辆侧滑稳定性的影响:
35、
36、其中,fx表示纵向摩擦需求;fy表示横向摩擦需求。
37、s608:计算纵向摩擦裕度fxm,量化非紧急制动操作对纵向停车安全的影响:
38、
39、s609:计算保证纵向停车安全所需的纵向摩擦系数fx:
40、
41、其中,fx为当前车速下保证停车安全所需的纵向摩阻系数;vstop为纵向安全停车速度,km/h;ss为停车视距,m;t表示驾驶者反应时间,s。
42、s610:令横向摩擦裕度fym等于零:
43、
44、s611:定义中间变量:
45、
46、
47、s612:计算侧滑临界速度vslip:
48、
49、s613:计算考虑纵坡的停车距离:
50、
51、其中,s表示停车距离,m;t表示驾驶者反应时间,s;vstop表示纵向临界速度,km/h。
52、s614:令停车距离等于停车视距,计算停车临界速度vstop:
53、
54、其中,sstop表示停车视距,m。
55、s615:建立静态侧倾模型:
56、
57、其中,ay表示横向加速度,m/s2;t表示车轴宽度,m;hr表示侧倾中心的高度,m;h表示质心高度,m;rφ为侧倾率。
58、s616:计算侧翻裕度rmay,量化非紧急制动操作对车辆侧倾稳定性的影响:
59、
60、s617:令侧翻裕度rmay等于零,计算侧翻临界速度vr:
61、
62、s618:确定最佳横向摩擦系数利用率:
63、最佳横向摩擦系数利用率是指使纵、横向临界速度最接近的摩擦系数分配方法。根据摩擦椭圆的定义可知,轮胎/路面摩擦极限条件下,轮胎纵向可用摩擦力和横向可用摩擦力的相互作用是,当一个量增加时,另一个量成比例减小。因此,需要调整横向摩擦系数利用率,确定一个制动减速度,使得纵、横向临界速度尽可能接近。
64、s619:计算弯道路段容许速度:
65、弯道路段容许速度是指车辆不侧滑、不侧翻以及保证纵向安全停车的最大速度。对于所有类型的车辆,弯道路段的理论容许速度vpermitted可以定义为最佳横向摩擦系数利用率条件下侧滑临界速度vslip、侧翻临界速度vrollover和停车临界速度vstop中的最小值。
66、vpermitted=min{vslip,vrollover,vsto (20)
67、s7:信息发布模块将经过所述数据处理模块得到的容许速度预告给驾驶者或自动驾驶车辆。
68、与现有技术相比,本发明具有如下有益效果:
69、(1)在稳态单轨模型中引入纵坡、超高、圆曲线半径和制动因素,提出了考虑道路几何线形和驾驶员操作的车辆模型,弥补了点质量模型无法考虑制动操纵对车辆稳定性影响的不足;
70、(2)揭示了非紧急制动操纵下道路与车辆相互作用机制,建立了考虑非紧急制动引起的荷载转移的车辆侧滑安全裕度预测理论模型,结合静态侧倾模型,提出了横向临界速度计算方法;
71、(3)引入摩擦椭圆概念,将车辆横、纵向安全控制因素进行了结合,根据轮胎/路面摩擦极限条件提出了弯道路段容许速度预测方法及系统。系统可对容许速度进行实时、提前预告,辅助驾驶员控制车速,提高弯道路段的安全性和通行效率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188996.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表