抓娃娃机及控制方法、装置和计算机设备与流程
- 国知局
- 2024-07-31 21:32:04
本发明涉及机械领域,具体而言,涉及一种抓娃娃机及控制方法、装置和计算机设备。
背景技术:
1、抓娃娃机将商品陈列在一个透明的箱内,其上有一个可控制抓取物品的抓夹,使用者要凭自己的技术操控抓夹,以取得自己想要的物品。因最早大多放置毛绒玩具之类的布偶填充玩具,故有“夹娃娃”、“夹公仔”之称。因为放置的布偶是十分受欢迎的布偶等物,因而深受儿童及青少年欢迎。
2、现有的抓娃娃机内的物品摆放方式为平面摆放,只能在抓娃娃机的内部摆放一层物品,因此可摆放的位置有限,导致抓娃娃机内部空间利用率不高。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种抓娃娃机及控制方法、装置和计算机设备,以至少解决现有的抓娃娃机结构导致物品摆放方式为平面摆放造成的可摆放物品数量较少空间利用率不高的技术问题。
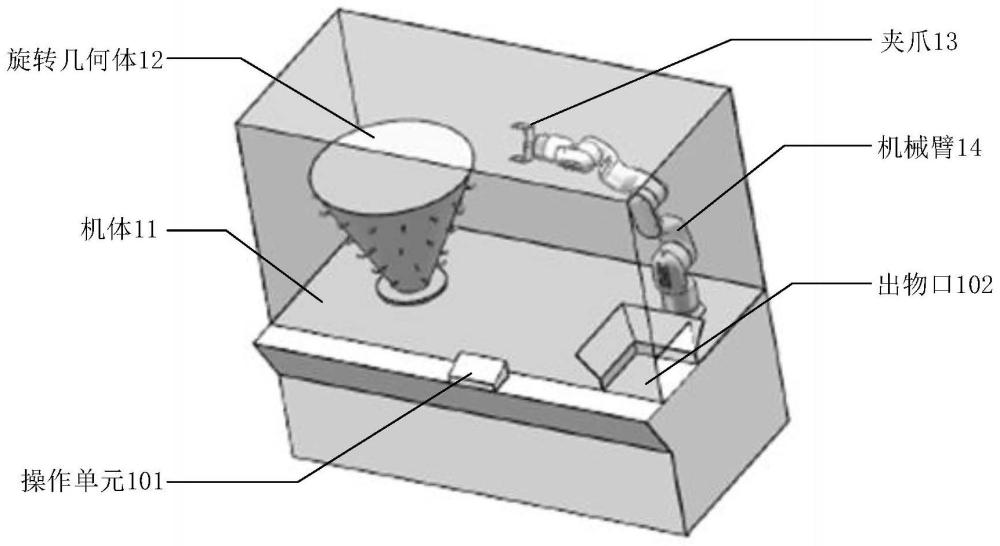
2、根据本发明实施例的一个方面,提供了一种抓娃娃机,包括:机体、旋转几何体、夹爪和机械臂,其中,机体上设置有操作单元和出物口,其中,操作单元用于控制夹爪抓取目标物品,出物口用于连通机体的内部和外部;旋转几何体位于机体的内部,用于放置目标物品,并响应于抓娃娃机的启动操作而旋转;夹爪位于机体内部,用于抓取或释放目标物品;机械臂位于机体内部,与夹爪连接,用于控制夹爪在三维空间内移动。
3、可选地,旋转几何体中包括旋转圆柱体和/或旋转倒置圆台。
4、可选地,操作单元包括用于控制夹爪所在的位置的第一操作按键,以及用于控制夹爪抓取或释放目标物品的行为的第二操作按键。
5、可选地,机体上还设置有显示单元,其中,显示单元用于显示目标物品和夹爪的位置。
6、可选地,机械臂包括关节和连杆,其中,夹爪和连杆通过关节连接,关节通过旋转带动夹爪转动;连杆带动夹爪移动。
7、根据本发明实施例的另一方面,还提供了一种抓娃娃机的控制方法,包括:响应于启动抓娃娃机的操作,旋转放置目标物品的旋转几何体;响应于控制抓娃娃机的操作,控制机械臂移动并采用夹爪抓取目标物品;在夹爪抓取到目标物品的情况下,控制机械臂将目标物品放置于预定位置。
8、可选地,确定机械臂所在的位置;判断机械臂所在的位置是否在预设的安全范围内;在机械臂所在的位置位于安全范围之外的情况下,生成危险提示;显示危险提示。
9、可选地,在机械臂移动至安全范围之外的情况下,还包括:根据机械臂所在的位置和安全范围,生成移动方案,其中,移动方案用于控制机械臂移动至安全范围内。
10、可选地,还包括:在机械臂未抓取到目标物品的情况下,控制机械臂移动至预设的起始位置。
11、根据本发明实施例的另一方面,还提供了一种抓娃娃机的控制装置,包括:旋转模块,用于响应于启动抓娃娃机的操作,旋转放置目标物品的旋转几何体;移动模块,用于响应于控制抓娃娃机的操作,控制机械臂移动到相应位置;抓取模块,用于抓取或放下目标物品。
12、根据本发明实施例的又一方面,还提供了一种非易失性存储介质,非易失性存储介质包括存储的程序,其中,在程序运行时控制非易失性存储介质所在设备执行上述中任意一项抓娃娃机的控制方法。
13、根据本发明实施例的再一方面,还提供了一种计算机设备,计算机设备包括处理器,处理器用于运行程序,其中,程序运行时执行上述中任意一项抓娃娃机的控制方法。
14、在本发明实施例中,提供了一种抓娃娃机,包括:机体、旋转几何体、夹爪和机械臂,其中,机体上设置有操作单元和出物口,其中,操作单元用于控制夹爪抓取目标物品,出物口用于连通机体的内部和外部;旋转几何体位于机体的内部,用于放置目标物品,并响应于抓娃娃机的启动操作而旋转;夹爪位于机体内部,用于抓取或释放目标物品;机械臂位于机体内部,与夹爪连接,用于控制夹爪在三维空间内移动。采用抓娃娃机的控制方式,通过响应于启动抓娃娃机的操作,旋转放置目标物品的旋转几何体;响应于控制抓娃娃机的操作,控制机械臂移动并采用夹爪抓取目标物品;在夹爪抓取到目标物品的情况下,控制机械臂将目标物品放置于预定位置,达到了增加抓娃娃机内部物品的可摆放位置的目的,从而实现了提高抓娃娃机的内部空间利用率的技术效果,进而解决了现有的抓娃娃机结构导致物品摆放方式为平面摆放造成的可摆放物品数量较少空间利用率不高的技术问题。
技术特征:1.一种抓娃娃机,其特征在于,包括:机体、旋转几何体、夹爪和机械臂,其中,
2.根据权利要求1所述的抓娃娃机,其特征在于,所述旋转几何体为旋转圆柱体和/或旋转倒置圆台。
3.根据权利要求1所述的抓娃娃机,其特征在于,所述操作单元包括用于控制所述夹爪所在的位置的第一操作按键,以及用于控制所述夹爪抓取或释放所述目标物品的行为的第二操作按键。
4.根据权利要求1所述的抓娃娃机,其特征在于,所述机体上还设置有显示单元,其中,所述显示单元用于显示所述目标物品和所述夹爪的位置。
5.根据权利要求1所述的抓娃娃机,其特征在于,所述机械臂包括关节和连杆,其中,所述夹爪和所述连杆通过所述关节连接,所述关节通过旋转带动所述夹爪转动;所述连杆带动所述夹爪移动。
6.一种抓娃娃机的控制方法,其特征在于,应用于权利要求1至5中任意一项所述抓娃娃机,所述抓娃娃机的控制方法包括:
7.根据权利要求6所述的方法,其特征在于,还包括:
8.根据权利要求7所述的方法,其特征在于,在所述机械臂移动至所述安全范围之外的情况下,还包括:
9.根据权利要求6至8任意一项所述的方法,其特征在于,还包括:
10.一种抓娃娃机的控制装置,其特征在于,包括:
11.一种非易失性存储介质,其特征在于,所述非易失性存储介质包括存储的程序,其中,在所述程序运行时控制所述非易失性存储介质所在设备执行权利要求6至9中任意一项所述抓娃娃机的控制方法。
12.一种计算机设备,其特征在于,包括:存储器和处理器,
技术总结本发明公开了一种抓娃娃机及控制方法、装置和计算机设备。其中,该抓娃娃机包括:机体上设置有操作单元和出物口,其中,操作单元用于控制夹爪抓取目标物品,出物口用于连通机体的内部和外部;旋转几何体位于机体的内部,用于放置目标物品,并响应于抓娃娃机的启动操作而旋转;夹爪位于机体内部,用于抓取或释放目标物品;机械臂位于机体内部,与夹爪连接,用于控制夹爪在三维空间内移动。本发明解决了现有的抓娃娃机结构导致物品摆放方式为平面摆放造成的可摆放物品数量较少空间利用率不高的技术问题。技术研发人员:李明洋,李顺冲,葛加伟受保护的技术使用者:节卡机器人(深圳)有限公司技术研发日:技术公布日:2024/3/11本文地址:https://www.jishuxx.com/zhuanli/20240731/189952.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表