一种基于联网的高速公路计费监控系统和方法与流程
- 国知局
- 2024-07-31 21:50:43
本发明涉及计费监控,尤其涉及一种基于联网的高速公路计费监控系统和方法。
背景技术:
1、高速公路是现代交通网络中重要的组成部分,承载着大量的车流量和货物运输需求。为了维护公路的运营秩序、提高收费效率和确保道路安全,需要对行驶在高速公路上的车辆进行计费监控。传统的高速公路计费方式主要是基于收费站,需要人工操作和车辆排队,不仅效率低下,而且容易引发交通拥堵和安全隐患。为解决这些问题,基于联网的高速公路计费监控方法应运而生。基于联网的高速公路计费监控方法利用信息技术、智能感知和数据分析等手段,实现了对车辆行驶轨迹和车辆类型的自动识别和计费。相比传统方式,基于联网的计费监控系统可以实时获取车辆信息,自动完成计费过程,不仅免去了人工操作和排队等待的时间,还大大提高了计费的效率,减少了人力资源的浪费。鉴于此,本发明提出一种基于联网的高速公路计费监控系统和方法,提高计费效率。
技术实现思路
1、有鉴于此,本发明提供一种基于联网的高速公路计费监控系统和方法,目的在于:
2、1)提出一种高速公路计费监控法方法,该方法通过将多个先进的计算机视觉技术和智能算法相结合,实现了高速公路上车辆的实时检测、识别、跟踪以及计费功能,提高计费自动化程度;2)利用deepsort进行车辆行驶轨迹跟踪和记录:借助deepsort目标跟踪算法,对识别到的车辆进行跟踪和记录其行驶轨迹。deepsort算法结合深度学习和卡尔曼滤波等技术,能够在复杂的场景中对车辆进行准确的跟踪,为后续的计费提供依据;3)引入了动态权重策略,根据特定条件调整费率,以更准确地计算车辆行程的费用,提供更精确的计费结果。
3、为实现上述目的,本发明提供的一种基于联网的高速公路计费监控方法,包括以下步骤:
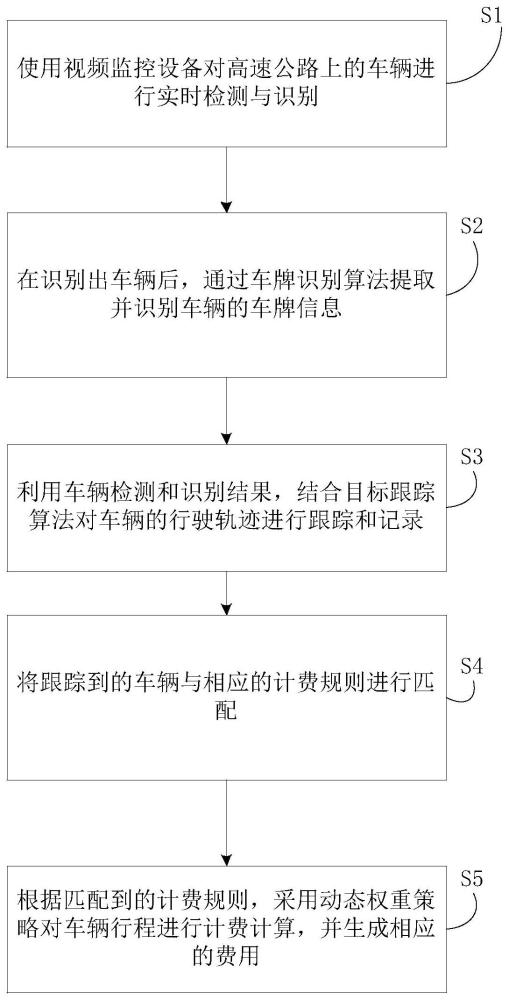
4、s1:使用视频监控设备对高速公路上的车辆进行实时检测与识别,其中yolo模型为所述车辆实时识别的主要实施方法;
5、s2:在识别出车辆后,通过车牌识别算法提取并识别车辆的车牌信息,其中字符识别为所述车牌识别算法的主要实施方法;
6、s3:利用车辆检测和识别结果,结合目标跟踪算法对车辆的行驶轨迹进行跟踪和记录,其中deepsort为所述目标跟踪算法的主要实施方法;
7、s4:将跟踪到的车辆与相应的计费规则进行匹配,所述计费规则包括不同车型的收费标准、时间段计费规则,所述匹配算法采用规则引擎drools自动匹配适用于每辆车的计费规则;
8、s5:根据匹配到的计费规则,采用动态权重策略对车辆行程进行费用计算,并生成相应的费用。
9、作为本发明的进一步改进方法:
10、可选地,所述s1步骤中使用视频监控设备对高速公路上的车辆进行实时检测与识别,包括:
11、s11:收集包含高速车辆的图像数据,并标注每个车辆在图像中的位置和类别,对图像进行预处理得到预处理后的高速车辆数据;
12、s12:用深度学习框架构建yolo模型,所述模型由特征提取网络和检测层组成,特征提取网络采用卷积神经网络从预处理后的高速车辆图像中提取特征表示;检测层负责预测车辆的边界框和类别概率,边框预测的计算公式为:
13、predictedx=(sigmoid(outputx)+gridx)/s
14、predictedy=(sigmoid(outputy)+gridy)/s
15、predictedw=anchorw*exp(outputw)/s
16、predictedh=anchorh*exp(outputh)/s
17、其中,outputx、outputy、outputw、outputh为特征提取网络输出参数,gridx、gridy表示当前边界框所在的格子的左上角相对于整张图像的偏移量,anchorw、anchorh表示预定义的锚框的宽度和高度,s为网格的大小,用于将预测的边界框位置映射到图像上,边界框参数为(predictedx,predictedy,predictedw,predictedh)表示边界框的中心坐标和宽度、高度;
18、s13:使用标注好的数据对构建的yolo模型进行训练,通过最小化目标检测误差函数来调整模型参数,使其能够准确地预测高速车辆的位置和类别,其中遗传算法为所述模型训练的主要实施方法。
19、所述s13步骤中通过最小化目标检测误差函数来调整模型参数,包括:
20、s131:随机生成一定数量的个体作为初始种群,记为npop;
21、s132:通过目标函数计算每个个体的适应度;
22、s133:根据每个个体的适应度,使用轮盘赌方法选择父代用于交叉和变异,概率计算公式为:
23、
24、其中,选择概率pi决定了第i个个体被选中作为父代的概率;xi表示第i个个体,
25、npop为种群大小;
26、s134:对选出的父代进行交叉操作,生成子代;
27、s135:对子代进行变异操作,引入新的基因;
28、s136:根据适应度函数值替换部分种群中的个体。
29、可选地,所述s2步骤中通过车牌识别算法提取并识别车辆的车牌信息,包括:
30、s21:对采用车辆图像进行边缘检测和颜色过滤确定车牌在车辆图像中的位置;
31、s22:对定位到的车牌图像进行字符分割,将每个字符单独提取出来,其中基于垂直投影方法统计每一列像素的亮度情况来确定字符的分割位置将字符分割出来;
32、s23:对分割得到的每个字符进行识别,其中svm为所述字符识别的主要实施方法。
33、所述s23步骤中对分割得到的每个字符进行识别,包括:
34、s231:对于每个字符图像进行特征提取,其中灰度共生矩阵为所述特征提取的主要实施方法;
35、s232:将提取的特征组合成一个特征向量表示为x=[x1,x2,...,xn],其中n是特征的维度;
36、s233:将字符的标签进行独热编码表示为一个k维的独热向量y=[y1,y2,...,yk],其中yi表示第i个类别是否是当前字符的标签;
37、s234:将特征向量和对应的标签输入到svm模型中进行训练,训练过程中,svm使用核函数来将特征向量映射到高维空间以便更好地分离不同类别的样本,其中svm的目标函数为:
38、
39、其中,w表示超平面的法向量,b表示偏置项,c表示惩罚系数,控制着分类器的错误容忍度,m表示训练样本的数量,xi表示第i个样本的特征向量,yi表示对应的标签。
40、s235:在模型训练完成后使用训练好的模型对新的字符图像进行识别,对于每个字符图像,按照步骤s231和s232处理后输入到训练好的svm模型中进行分类,模型输出识别出的字符。
41、可选地,所述s3步骤中目标跟踪算法对车辆的行驶轨迹进行跟踪和记录,包括:
42、s31:基于卡尔曼滤波器和匈牙利算法,将当前帧中的目标与之前帧中的已跟踪目标进行关联,其中目标之间的相似度为所述目标关联的主要实施方法;
43、s32:使用卡尔曼滤波器对每个跟踪目标的状态进行预测和更新,所述卡尔曼滤波器包括预测步骤和更新步骤,其中预测步骤使用运动模型预测目标的未来状态,更新步骤使用测量值来修正预测结果;
44、s33:存储每个跟踪目标的历史轨迹信息,将每个跟踪目标与其对应的轨迹进行关联。
45、所述s32步骤中使用卡尔曼滤波器对每个跟踪目标的状态进行预测和更新,包括:
46、使用卡尔曼滤波器对每个跟踪目标的状态进行预测和更新的具体技术方案如下:
47、s321:对于每个跟踪目标,初始化其状态向量x和协方差矩阵p,所述状态向量x包括位置、速度状态变量;所述协方差矩阵p表示状态估计的不确定性;
48、s322:对跟踪目标的状态进行预测,状态预测计算公式为:
49、预测状态:x'=f*x
50、预测协方差:p'=f*p*f^t+q
51、其中,f为状态转移矩阵,q为过程噪声协方差矩阵,表示运动模型中的不确定性和外部干扰;
52、s323:根据实际观测值来修正预测的状态估计,计算预测状态与实际观测之间的残差,计算公式为:
53、y=z-h*x'
54、其中,h表示观测矩阵,将状态向量映射到观测空间中,z表示观测向量;
55、s324:根据测量残差,计算卡尔曼增益k和更新后的状态估计,其中卡尔曼增益k的计算公式为:
56、k=p’*ht*(h*p'*ht+r)-1
57、其中,r为观测噪声协方差矩阵,表示观测过程中的不确定性和噪声;
58、s325:使用卡尔曼增益修正预测的状态估计和协方差矩阵,更新状态估计的计算公式为:
59、x=x'+k*y
60、更新协方差矩阵的计算公式为:
61、p=(i-k*h)*p'。
62、可选地,所述s4步骤中将跟踪到的车辆与相应的计费规则进行匹配,包括:
63、s41:使用drools规则语言(drl)定义计费规则,创建计费规则库,所述规则库包括不同车型的收费标准和时间段计费规则;
64、s42:配置drools规则引擎,设置规则库的加载和执行方式,创建一个kiesession对象,用于加载和执行规则;
65、s43:将提取得到的车辆属性作为输入,通过执行规则引擎的fireallrules()方法触发规则的匹配过程,drools会自动匹配适用于每辆车的计费规则,当规则匹配成功时,触发相关计费规则的执行。
66、可选地,所述s5步骤中采用动态权重策略对车辆行程进行费用计算,包括:
67、指数加权移动平均为所述动态权重策略主要实施方法,计算公式为:
68、wi=α·di+(1-α)·wi-1
69、其中,wi表示第i段行程的动态权重平均值,di表示第i段行程的行驶距离,wi-1表示前一段行程的动态权重平均值,其中权重系数为0<α<1;
70、所述总行程费用计算公式为:
71、
72、其中,r为每单位距离费率,fi=wi·r,表示第i段行程的费用。
73、为了解决上述问题,本发明提供一种基于联网的高速公路计费监控系统,所述系统包括:
74、车辆检测和识别模块,用于对高速公路上的车辆进行实时检测与识别,并在识别出车辆后,通过车牌识别算法提取并识别车辆的车牌信息;
75、行驶轨迹跟踪和记录模块,用于利用车辆检测和识别结果,结合目标跟踪算法对车辆的行驶轨迹进行跟踪和记录,将跟踪到的车辆与相应的计费规则进行匹配;
76、费用计算模块,用于根据匹配到的计费规则,采用动态权重策略对车辆行程进行费用计算,并生成相应的费用。
77、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
78、存储器,存储至少一个指令;
79、通信接口,实现电子设备通信;及
80、处理器,执行所述存储器中存储的指令以实现上述所述的一种基于联网的高速公路计费监控方法。
81、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的基于联网的高速公路计费监控方法。
82、相对于现有技术,本发明提出一种基于联网的高速公路计费监控方法,该技术具有以下优势:
83、首先,本方案提出一种高速公路计费监控法方法,该方法通过将多个先进的计算机视觉技术和智能算法相结合,实现了高速公路上车辆的实时检测、识别、跟踪以及计费功能,提高计费自动化程度;
84、同时,本方案利用deepsort进行车辆行驶轨迹跟踪和记录,借助deepsort目标跟踪算法,对识别到的车辆进行跟踪和记录其行驶轨迹。deepsort算法结合深度学习和卡尔曼滤波等技术,能够在复杂的场景中对车辆进行准确的跟踪,为后续的计费提供依据;
85、本方案还引入了动态权重策略,根据特定条件调整费率,以更准确地计算车辆行程的费用,提供更精确的计费结果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/191262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种门禁巡更器的制作方法
下一篇
返回列表