一种基于驾驶员行为及生理特征的隧道安全控制系统的制作方法
- 国知局
- 2024-08-02 14:38:49
本技术涉及交通安全控制,尤其涉及一种基于驾驶员行为及生理特征的隧道安全控制系统。
背景技术:
1、在当前的交通安全管理中,隧道安全问题一直是一项重大挑战。隧道作为交通网络中不可或缺的部分,因其内部环境复杂、视线受限等特点,极大地增加了驾驶难度与风险。传统的隧道管理系统,通常依赖于基础设施和规定的安全规则,如交通信号灯、限速标志、明确的道路标线等。然而,这些传统的措施只能被动地管理交通安全问题,如当交通事故发生时才能进行反应,其主动预防事故的能力较弱。
2、另一方面,传统的隧道管理系统在处理驾驶员行为方面存在明显不足。驾驶员行为是影响道路安全的关键因素之一,然而传统的系统通常无法对驾驶员行为进行有效监控和管理。更重要的是,这些系统无法实时了解和分析驾驶员的生理状态,如疲劳、心跳加速等,这些状态对驾驶员的反应能力和判断力产生重要影响,进而影响道路安全。可见,如何综合采集分析驾驶员生理特征对隧道内安全驾驶进行综合评估,并依据评估结果提供主动防控提醒从而对隧道内的行车安全进行保障就显得尤为重要。
技术实现思路
1、本技术实施例第一方面提供一种基于驾驶员行为及生理特征的隧道安全控制系统,该隧道安全控制系统能够提高了隧道驾驶的安全性。
2、本技术实施例提供的隧道安全控制系统包括:
3、生理数据采集模块,所述生理数据采集模块能够实时捕获驾驶员的生理状态数据;
4、行为数据采集模块,所述行为数据采集模块能够实时捕获驾驶员的驾驶行为数据;
5、数据传输模块,所述数据传输模块能够接收所述生理数据采集模块和所述行为数据采集模块传输的数据并进行数据处理和传输;
6、云端平台,所述云端平台能够根据接收到的数据通过梯度决策树模型对驾驶员行为数据和生理数据进行分析,以判断驾驶员的驾驶状态是否存在安全风险;
7、预警和控制模块,在所述云端平台判断驾驶员的驾驶状态存在安全风险时,所述预警和控制模块向目标区域和/或车辆发出预警信号,和/或采取措施进行干预。
8、另外,本技术实施例提供的隧道安全控制系统还可以具有如下附加的技术特征:
9、在一种可选的方案中,所述隧道安全控制系统还包括:视频监测模块,所述视频监测模块设置于隧道内外,包括安装于隧道进出口的卡口相机和安装于隧道内具有目标轨迹跟踪、车辆结构化属性识别和事件检测功能的雷视设备,所述视频监测模块能够实时获取隧道内的视频信息;
10、环境监测模块,所述环境监测模块设置于隧道内,所述环境监测模块能够获取隧道内温湿度、照度、能见度和气体含量中的至少一者;
11、主动式安全管理平台,所述主动式安全管理平台能够获取所述视频监测模块和所述环境监测模块的监测数据并进行存储和分析,所述主动式安全管理平台与所述云端平台数据连接以供所述云端平台获取数据。
12、在一种可选的方案中,所述数据传输模块包括车载通信系统、车载单元和路侧单元;
13、所述车载通信系统安装于车辆,所述车载通信系统分别与所述生理数据采集模块和所述行为数据采集模块数据连接,所述车载单元安装于车辆,具有大带宽、低延时、高可靠、高精度rtk差分定位和惯性组合导航等特征,赋能网联车辆全时空的感知能力;所述路侧单元安装于隧道的预设位置,具有低延时、高可靠、大带宽、丰富的路侧前端和平台接入能力,高精度定位基站功能等特征,可为车辆提供全方位的道路时空信息;所述车载单元能够对接收到的数据进行处理并基于5g+cv2x传输技术发送至所述路侧单元或所述云端平台,所述路侧单元能够对接收到的数据进行处理并发送至所述云端平台。
14、在一种可选的方案中,所述生理数据采集模块包括眼动传感器、心电传感器、脑电波传感器和皮肤电传感器中的至少一者。
15、在一种可选的方案中,所述行为数据采集模块包括车辆速度传感器、转向角度传感器、刹车力度监测传感器中的至少一者。
16、本技术实施例的有益效果在于:
17、本技术实施例中的隧道安全控制系统通过实时监控和分析驾驶员的行为特征和生理状态,预测可能的安全风险,并在必要时通过预警信号或控制措施进行干预,以实现对隧道安全的主动管理,提高了隧道驾驶的安全性。
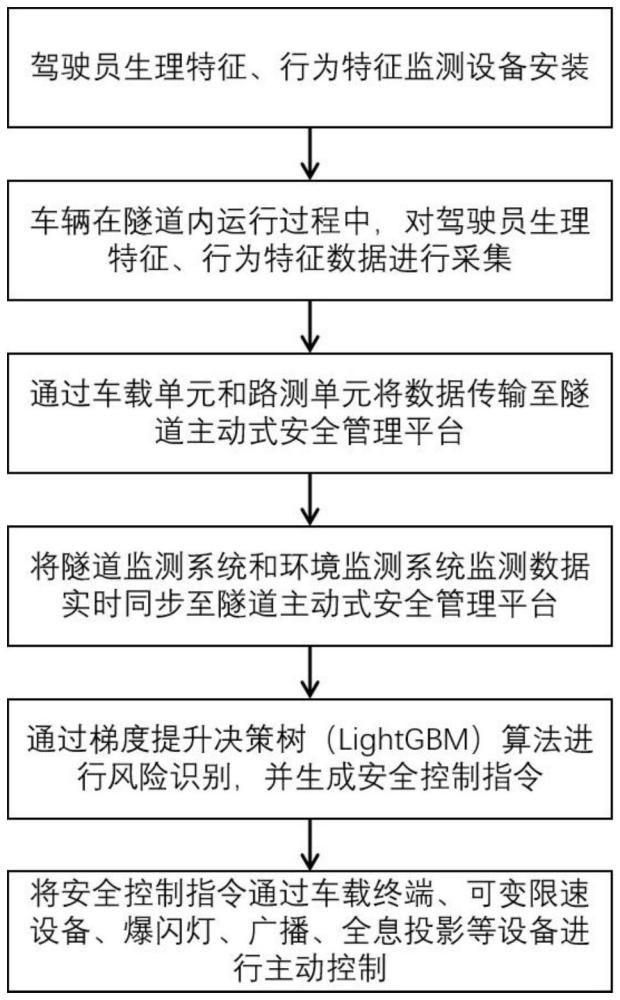
18、本技术实施例第二方面提供一种隧道安全控制方法,所述隧道安全控制方法包括上述实施例中的隧道安全控制系统,具体地,所述隧道安全控制方法包括如下步骤:
19、通过所述生理数据采集模块和所述行为数据采集模块获取驾驶员的生理状态数据和驾驶行为数据,并将获取的数据传输至数据传输模块;
20、数据传输模块对数据进行处理并传输至云端平台,所述数据传输模块对数据的处理包括对数据的预处理;
21、所述云端平台根据获取的数据信息通过梯度决策树模型对驾驶员行为数据和生理数据进行数据分析,判断驾驶员的驾驶状态是否存在安全风险;
22、在所述云端平台判断驾驶员的驾驶状态存在安全风险时,所述预警和控制模块向目标区域和/或车辆发出预警信号,和/或采取措施进行干预。
23、在一种可选的方案中,所述云端平台的数据分析过程包括如下步骤:
24、1)进行数据提取并进行风险定义,所述风险定义包括:以刹车踏板开度变化率作为风险评价指标,定义当驾驶员采取紧急刹车措施并超过预设程度时为风险驾驶行为;
25、选取一系列分位数值并通过人工观察车载视频判断风险样本,选定预设分位值作为风险样本识别阈值;
26、对于提取的样本,构建输入向量为x=[(x1,y1),(x2,y2),...,(xn,yn)]t,首先经过归一化处理获得标准化输入x*如式:
27、
28、其中,xn表示输入特征,yn表示风险标签,x表示输入向量,x*表示标准化输入向量;
29、2)使用lightgbm算法进行模型训练;在训练模型后,使用网格搜索方法对模型进行调参,通过对模型参数的系统探索,找出能够使模型达到最优表现的参数组合;
30、3)使用shap模型对特征的贡献进行排序,从而理解在驾驶安全风险辨识中起到关键作用的特征。
31、在一种可选的方案中,在构建输入向量后,通过lightgbm算法进行风险识别,该算法的目标函数为:
32、
33、其中,loss(·)为模型损失函数,本发明中采用交叉熵损失函数为n为批样本数量,l1为正则化项。
34、在一种可选的方案中,所述步骤3)包括如下步骤:
35、在风险识别的过程中,利用grid search算法进行超参数调整,以寻求最优的模型参数;
36、利用优化后的参数对梯度提升决策树模型进行训练,训练过程中根据测试集的表现对模型进行调整,训练结束后,将训练好的模型应用到新收集的数据上,进行风险识别;
37、在风险识别结果的基础上,通过shap模型进行特征贡献度排序,分析各个特征对驾驶风险的影响,公式表示为:
38、
39、其中,g(·)为解释模型,m是输入的特征数,z表示相应的特征是否存在,取值为0或1,φ0为常数,φ为每个特征的shapley值。
40、在一种可选的方案中,所述预警信号包括对于驾驶员的预警信息提示、显示于隧道内的预警信息提示中的至少一者。
41、本技术实施例的有益效果在于:
42、本技术实施例中的隧道安全控制方法通过采集驾驶员的行为数据和生理数据,如驾驶行为、脑电、心电、眼动等,进行深度分析和模型建立。其次,该系统利用先进的机器学习算法,如lightgbm、网格搜索和shap等,对采集的数据进行处理和分析,实现对驾驶员行为和生理状态的精准识别和风险预测,提高了系统的智能化和准确性;最后,通过主动预警和控制,实现了对驾驶员行为的主动干预,提高了隧道驾驶的安全性。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
本文地址:https://www.jishuxx.com/zhuanli/20240801/243478.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种电子设备的制作方法
下一篇
返回列表