基于相对运动趋势的光电追踪车辆的方法、装置及设备与流程
- 国知局
- 2024-08-02 14:55:16
本发明涉及地理信息技术、数据库技术及通信协议(http及websocket等)领域。
背景技术:
1、随着企业规模的不断扩大及其承载业务的不停提出,配送及运营所需的车辆也逐渐增多。车辆在行驶过程中,经常出现如下问题:无法查看车辆有无按照规定路线行驶,导致出现错误行驶;车辆出现事故或其他问题,无法在第一时间调取监控查看车辆及其周边环境;由于车辆处在运动状态,易导致车辆脱离监控画面,手动引导不够准确,无法实时追踪。为便于企业关注车辆实时位置及其实时监控而设计的追踪车辆算法,目前较为缺乏。多数平台在监控车辆时,绝大对数为手动监控。由于车辆运动,这种方法经常出现车辆离开监控画面,造成这一时段车辆监控信息的丢失。
2、因此,如何提供一种光电追踪车辆的方法,成为本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于相对运动趋势的光电追踪车辆的方法、装置及设备,该方法对车辆及其每天的起始时间进行数据库录入,以便用户查看设备的历史状态,并对车辆进行组织架构的挂接,使整个车队简洁明了的以目录树的结构直观展现。
2、基于这一发明构思,本发明具有四个独立的技术方案:
3、1、一种基于相对运动趋势的光电追踪车辆的方法,包括:
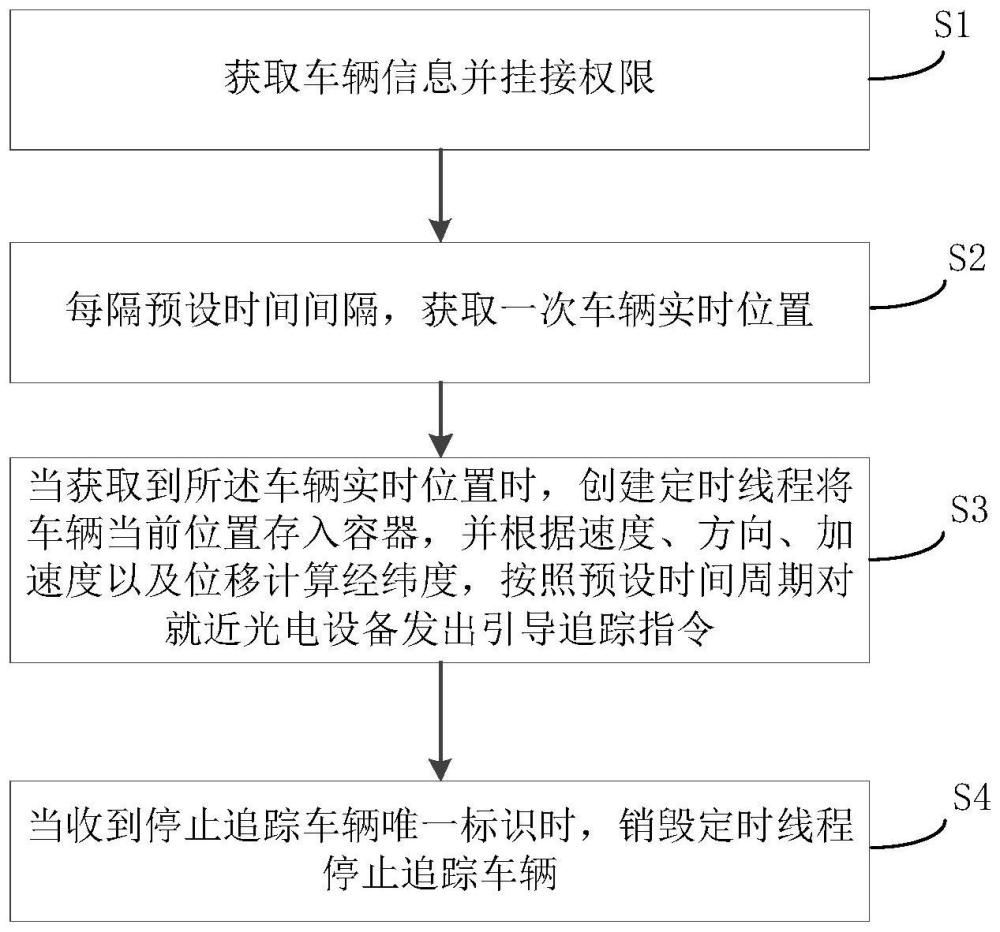
4、s1、获取车辆信息并挂接权限;
5、s2、每隔预设时间间隔,获取一次车辆实时位置;
6、s3、当获取到所述车辆实时位置时,创建定时线程将车辆当前位置存入容器,并根据速度、方向、加速度以及位移计算经纬度,按照预设时间周期对就近光电设备发出引导追踪指令;
7、s4、当收到停止追踪车辆唯一标识时,销毁定时线程停止追踪车辆。
8、进一步地,所述预设时间间隔为3秒。
9、进一步地,所述预设时间周期为1.5秒。
10、进一步地,所述引导追踪指令包括如下步骤:
11、发送指令,判断指令为开始引导还是终止引导,若是终止引导,则立即终止光电动作;若是开始引导,则判断车辆是否为首次引导;
12、若是首次引导则使用车辆当前位置,若是再次引导则使用车辆计算后的预推送位置。
13、进一步地,所述加速度通过如下公式计算:
14、accaleration=(velocityn-velocityo)/3.6;
15、其中,accaleration表示车辆加速度,velocityn表示车辆当前速度,velocityo表示车辆之前速度,。
16、进一步地,所述位移通过如下公式计算:
17、distance=velocityn*1.5+1.125*accaleration;
18、其中,distance表示位移。
19、进一步地,所述经纬度通过如下公式计算:
20、当distance>0时,
21、elng=lng+distance*sin(direction*π/180)*180/(π*6371229*cos(lat*π/180));
22、elat=lat+distance*cos(direction*π/180)/(π*6371229/180);
23、当distance≤0时,
24、elng=lng;
25、elat=lat;
26、其中,lng表示原始车辆经度,lat表示原始车辆纬度,elng表示引导经度,elat表示引导纬度。
27、2、一种基于相对运动趋势的光电追踪车辆的装置,包括:
28、信息获取模块,用于获取车辆信息并挂接权限;
29、实时监测模块,用于每隔预设时间间隔,获取一次车辆实时位置;
30、计算模块,用于当获取到所述车辆实时位置时,创建定时线程将车辆当前位置存入容器,并根据速度、方向、加速度以及位移计算经纬度,按照预设时间周期对就近光电设备发出引导追踪指令;
31、停止追踪模块,用于当收到停止追踪车辆唯一标识时,销毁定时线程停止追踪车辆。
32、3、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述方法。
33、4、一种电子设备,包括处理器和存储装置,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行上述方法。
34、本发明提供的基于相对运动趋势的光电追踪车辆的方法、装置及设备,至少包括如下
35、有益效果:
36、本发明通过车辆的相对运动趋势,计算出车辆的引导位置并对车辆进行光电实时追踪,其中,在用户选定需要实时追踪的车辆后,最近的光电设备的首次动作就会引导至车辆的当前位置;在此之后,会根据之前的速度及当前速度计算加速度,结合引导周期及车辆运动方向即可得出引导位置并再次引导光电;当用户停止追踪车辆或刷新页面及关闭浏览器后,同样停止光电对车辆的追踪。
技术特征:1.一种基于相对运动趋势的光电追踪车辆的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预设时间间隔为3秒。
3.根据权利要求1所述的方法,其特征在于,所述预设时间周期为1.5秒。
4.根据权利要求1所述的方法,其特征在于,所述引导追踪指令包括如下步骤:
5.根据权利要求1所述的方法,其特征在于,所述加速度通过如下公式计算:
6.根据权利要求1所述的方法,其特征在于,所述位移通过如下公式计算:
7.根据权利要求6所述的方法,其特征在于,所述经纬度通过如下公式计算:
8.一种基于相对运动趋势的光电追踪车辆的装置,其特征在于,包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一所述的方法。
10.一种电子设备,包括处理器和存储装置,其特征在于,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行如权利要求1-7任一所述的方法。
技术总结一种基于相对运动趋势的光电追踪车辆的方法、装置及设备,涉及地理信息技术、数据库技术及通信协议(http及websocket等),方法包括:获取车辆信息并挂接权限;每隔预设时间间隔,获取一次车辆实时位置;当获取到所述车辆实时位置时,创建定时线程将车辆当前位置存入容器,并根据速度、方向、加速度以及位移计算经纬度,按照预设时间周期对就近光电设备发出引导追踪指令;当收到停止追踪车辆唯一标识时,销毁定时线程停止追踪车辆;该方法还会对车辆及其每天的起始时间进行数据库录入,以便用户查看设备的历史状态,并对车辆进行组织架构的挂接,使整个车队简洁明了的以目录树的结构直观展现。技术研发人员:张乃松,崔日华受保护的技术使用者:大庆安瑞达科技开发有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240801/244327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。