一种面向复杂环境中WSN节点部署的樽海鞘算法
- 国知局
- 2024-08-02 15:01:51
本发明涉及无线传感网络wsn节点部署,尤其是一种面向复杂环境中wsn节点部署的樽海鞘算法。
背景技术:
1、无线传感网络wsn能通过部署在监测区域内的传感器节点实现区域内信息的感知和传输,而节点的有效部署是提高wsn监测质量的关键。
2、在对于环境相对较为复杂的监测区域时,采用传统的算法对wsn节点部署已不能满足要求,相关学者将元启发式算法运用于wsn的节点部署。利用元启发式算法的并行性、高效性、全局优化等特点,实现wsn在复杂环境中的节点部署。元启发式算法主要是通过模拟自然界生物的生活习性及自然演变提出来的优化算法,如粒子群、遗传算法、人工蜂群、鱼群算法等。它们可以通过自身的不断迭代得到目标问题的一个可行解。元启发式算法已成功地运用到wsn的节点部署中。
3、随着元启发式算法的不断发展,越来越多的学者将相关的算法运用于无线传感网络中的节点部署。但基本的元启发式算法在实际运用中,因自身的一些问题,如提前陷入局部最优、全局搜索能力差等缺陷,导致对传感器节点进行部署时,结果不理想,因此常常需要对基本元启发式算法进行改进。
技术实现思路
1、本发明的发明目的在于:针对上述存在的问题,提供一种面向复杂环境中wsn节点部署的樽海鞘算法,能够有效提升节点监测覆盖率。
2、本发明采用的技术方案如下:
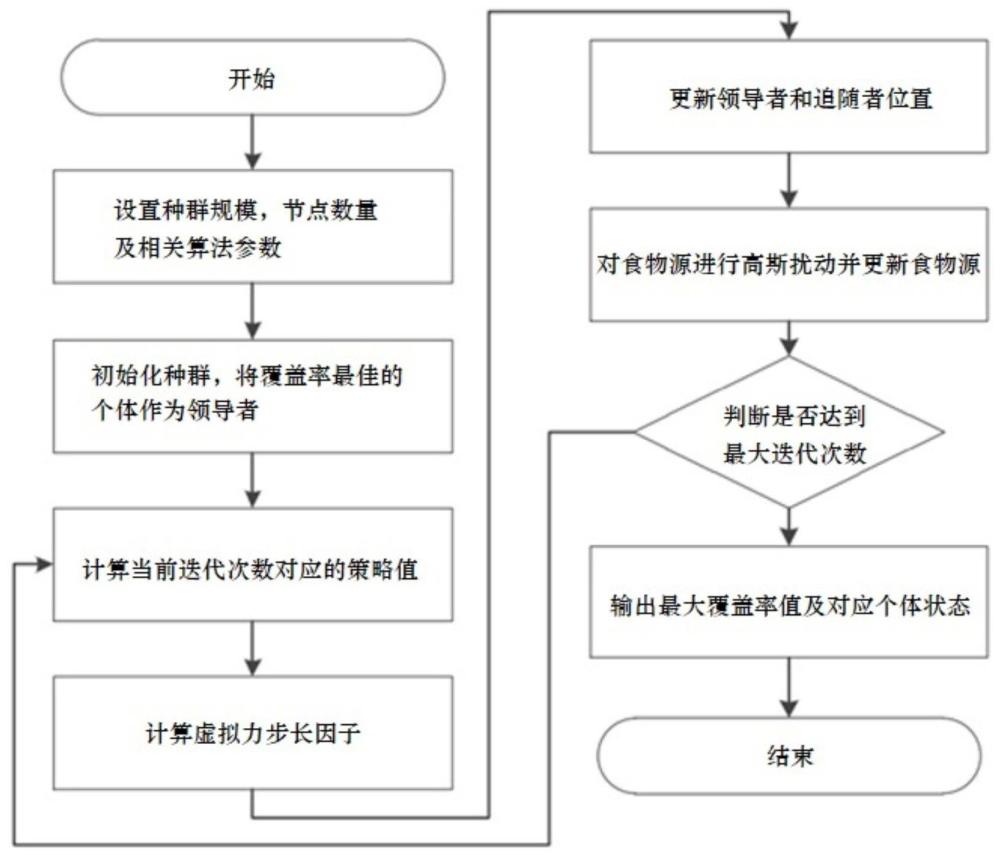
3、一种面向复杂环境中wsn节点部署的樽海鞘算法,包括以下步骤:
4、step1:对本算法中的个体进行初始化,设置种群规模、区域边界、节点数量及算法相关参数;
5、step2:根据初始化个体计算每个个体的覆盖率,并对覆盖率值进行排序,将覆盖率最大的个体位置作为食物源;
6、step3:计算当前迭代次数对应的改进策略值;
7、step4:计算领导者代表的传感器节点间以及追随者个体中传感器节点间的虚拟力因子;
8、step5:选取自适应的领导者数量根据领导者位置更新公式对其进行位置更新;
9、step6:对自适应的追随者位置根据追随者位置更新公式进行位置更新;
10、step7:计算每个樽海鞘个体位置更新后的传感器网络覆盖率;
11、step8:将最优的网络覆盖率与当前食物源对应的覆盖率进行对比,若优于,则将食物源位置更新到最优位置;
12、step9:对食物源位置进行高斯扰动,并得到最优的食物源位置覆盖率;
13、step10:判断是否达到最大迭代次数,达到最大迭代次数,输出当前传感器节点覆盖率及对应的节点位置,否则返回step3继续迭代。
14、具体的,樽海鞘算法是根据樽海鞘链衍生出来的群体算法,为了对樽海鞘算法进行数学建模,首先将樽海鞘链分为两部分:领导者和追随者。领导者是链条前端的个体,而其他个体则被视为追随者。领导者引导群体向更好的位置移动,追随者跟随彼此。樽海鞘链是一种首尾不相连的"链”状的形式,并按照个体顺序依次移动,因此樽海鞘算法中追随者位置移动只会依赖于前一个樽海鞘个体,即只有第1个追随者依赖于领导者,第2个追随者则依赖于第1个追随者,以此类推,而不是所有的追随者都向领导者位置前进。与其他群体算法类似,樽海鞘的位置在n维搜索空间中定义的,其中n是给定问题的变量数,假定在搜索空间中有一个称为f的食物源作为樽海鞘群体的目标。
15、樽海鞘算法在求解优化问题时,通过樽海鞘链的领导者和追随者不断的对最佳食物源的搜索。领导者在整个樽海鞘链中的作用是为群体在当前食物源附近进一步寻找更好的食物源位置,并引导着追随者朝着最佳食物源方向移动。追随者则是尽可能地遍历整个搜索空间。在基本的樽海鞘算法中以樽海鞘链模型为基础将适应度值最佳的个体作为领导者,其余个体为追随者。最终的食物源位置即为优化问题的最优解。
16、假设樽海鞘链有n个樽海鞘个体,每个樽海鞘个体代表一种传感器节点部署方案,即一个樽海鞘个体包含了监测区域内的所有传感器节点。用一个樽海鞘个体将所有的节点表示为:
17、
18、每个节点信息由(x,y)坐标构成。把无线传感网络覆盖率作为目标函数,对监测区域内传感器节点部署简化为对目标函数进行寻优。将樽海鞘个体的节点位置信息代入目标函数值进行计算,并将目标函数值进行排序,根据改进的gassa算法中自适应领导者和追随者数量,确定排序前a*n的个体为在领导者,其余的为追随者。
19、然而,gassa樽海鞘算法在对传感器节点进行部署时,虽然能够达到较高的覆盖率,但传感器节点间的覆盖漏洞较多,存在节点分布不均匀,节点覆盖率不高等问题,gassa樽海鞘算法能够使传感器节点在移动过程中,尽可能分散开来,使传感器节点部署后的覆盖面积扩大,但在领导者位置更新中,领导者的移动方向只由食物源决定,当食物源陷入局部最优时就会使传感器节点部署在一个密集的区域中,造成节点部署不够均匀,重复覆盖区域较多。
20、本方案中,根据传感器节点部署的特点,在gassa樽海鞘算法得基础上进一步对其进行优化,在领导者和追随者位置更新中加入虚拟力因子,虚拟力因子通过节点间产生的虚拟力构成。
21、在领导者位置更新中,领导者的移动方向只由食物源决定,当食物源陷入局部最优时就会使传感器节点部署在一个密集的区域中,造成节点部不够均匀,重复覆盖区域较多。因此在领导者位置更新过程中引入虚拟力因子,使领导者个体包含的传感器节点在移动过程中,朝着当前全局最优和虚拟力导向的合力方向移动,使传感器节点在部署过程中受虚拟力的影响,能够尽可能的更加均匀地分布。
22、在追随者位置更新中,虽然在位置中引入权重值,能使算法有效地避免上一个个体代表的传感器节点的过于密集导致当前个体代表的传感器节点部署方式盲目跟随的状态,但传感器节点依旧不能分散到更多的区域,因此在追随者位置更新中也引入虚拟力因子,使当前追随者代表的传感器节点在部署过程中受前一个个体的传感器位置和当前个体的传感器节点的虚拟力共同的影响,使传感器节点更为均匀分布在监测区域内。
23、可供选择的,step1中,设置虚拟力因子的权重值,虚拟力算法中的距离阈值,以及虚拟力中吸引力和排斥力系数、。其中,传感器节点间吸引力和排斥力阈值设置为,其中,为传感器节点的感知半径。
24、本方案利用高斯gassa樽海鞘算法导致的部署后,wsn节点分布不均匀的问题,对其参数进行改进,再融入虚拟力算法,提出了一种融合虚拟力步长因子的樽海鞘算法(vgassa),使在相同的传感器节点数量的情况下,所覆盖的面积最大化。在节点部署中,吸引力和排斥力阈值的设置是为了实现节点之间的均衡分布和防止节点之间过于密集或过于稀疏。
25、可供选择的,step3中,计算当前迭代次数对应的参数值公式为:
26、
27、其中,a为领导者数量控制因子,n为樽海鞘群体的数量总数,为向上取整,i为在第t次迭代过程中的第i个领导者,k为通过洛伦茨函数计算出来的参数,为第t次迭代过程中领导者的数量,则追随者的数量为,为非线性指数递减的凹函数权重值,t为当前迭代次数,t为最大迭代次数。
28、其中,洛伦茨函数具体表达式为:
29、
30、其中,a为峰值,为位置参数,r为尺度参数,t为当前迭代次数,t为最大迭代次数。
31、可供选择的,step5中,领导者位置更新公式为:
32、
33、其中,为领导者位置,为食物源位置,为虚拟力因子,为虚拟力因子的权重值,为收敛因子,l为控制搜索空间大小,为搜索方向。
34、可供选择的,step6中,追随者位置更新公式为:
35、
36、其中,表示为第i个追随者在d维空间中的位置更新,为非线性指数递减的凹函数权重值,在算法中追随者位置更新中在上一次个体位置中引入权重,使算法中追随者个体不完全依赖于前一个个体,能更好的平衡算法中的全局搜索和局部搜索的能力,为虚拟力因子的权重值,f为虚拟力因子.
37、可供选择的,step9中,高斯扰动的公式为:
38、
39、其中,引入高斯扰动项表示为以为均值,为方差的方差服从高斯分布的值;为点对点乘法;为用来控制高斯扰动的干扰范围的高斯扰动项控制因子,表示为扰动后食物源的适应度值,表示为未扰动的食物源位置适应度值,通过贪婪策略,对当前食物源位置始终保持最优解。
40、可供选择的,部署区域中存在障碍物时,还包括以下步骤:
41、step11:采用布尔模型对障碍物区域进行网格化近似处理;
42、step12:在部署过程中,将传感器节点与障碍物网格化后得到的目标点进行对比,通过对传感器节点位置的映射,判断当前传感器节点所处障碍物环境中的位置情况,从而判断传感器节点的有效性;若无效,则进行下一步骤;
43、step13:将障碍物内的无效传感器节点移动至距离最近的障碍物边界有效区域。
44、具体的,在实际监测的复杂环境中,障碍物的特征有呈现规则的和不规则两种情况。障碍物位置可以事先获取的情况下,对两种情况的障碍物,在本专利中均采用网格近似化的方法对其进行处理。首先对目标监测区域进行网格分割,网格大小直接影响对障碍物区域的判定及覆盖率的精确度,为更好地得到障碍物区域的大小及传感器节点覆盖率的精确度,因此设置网格大小远小于障碍物的大小。当障碍物的边界在某一个网格内或障碍物覆盖整个网格,则将该网格标记为障碍物网格。
45、将障碍物区域进行网格化近似处理得到障碍物区域信息,是为了与传感器节点位置进行对比,判断传感器节点部署是否有效。即当传感器节点位于障碍物内部时,因在障碍物内部无法对节点进行部署存在,则此时的传感器节点的位置是无效的。当传感器节点位于障碍物边缘及外部时,则视为有效部署的节点。因此在对监测区域中的障碍物进行近似处理时,采用布尔模型对障碍物网格进行处理。为了使部署后的传感器节点能够有效地传输数据,通过对映射后的传感器节点位置与障碍物区域信息进行对比,从而判断传感器节点的有效性。为保证传感器节点部署的有效性,根据最小移动原则减少节点的能量消耗,将障碍物内的无效传感器节点移动至距离最近的障碍物边界有效区域。
46、可供选择的,step11中,当所属网格中存在障碍物,则将该网格标记为障碍物网格,并记为“1”,其余网格记为“0”;将所有标记为“1”的障碍物网格统计为一个集合,判断传感器节点是否有效。
47、可供选择的,step12中,在障碍物网格的边长为a的监测区域中,当前传感器节点s的位置为(x,y),将传感器节点的位置通过下式的方式映射到网格化后的区域中:
48、
49、其中,s'为映射后传感器节点位置,为传感器节点s的位置向上取最小的整数,即将传感器节点映射到当前位置网格的右上角点;
50、将映射后的传感器节点位置s'与障碍物网格内部交点进行对比,判断映射后传感器节点位置是否位于障碍物网格交点的集合中,若处于障碍物网格内部则该传感器节点为无效节点。
51、可供选择的,step13中,首先建立所有的障碍物网格的边界信息库:从网格化得到障碍物网格的最左侧边缘起,将最左侧边缘障碍物网格的交点、每次增加一个网格边长的最顶部和最底部的网格交点、最右侧边缘障碍物网格的交点,这三部分的网格交点记为边界交点,并设障碍物边界的位置集合为:
52、
53、然后根据移动距离最小原则:计算边界坐标与节点位置s'之间的距离,为减少传感器节点移动距离大而产生的功耗损失,则将传感器节点s'移动至距离最短的障碍物边界处,具体表达式如下:
54、
55、
56、其中,表示距离映射后的传感器节点距离最近的边界点,为第i个边界点与节点s'之间的距离。
57、综上所述,由于采用了上述技术方案,本发明的有益效果是:
58、1、本发明所提供的一种面向复杂环境中wsn节点部署的樽海鞘算法,在gassa樽海鞘算法中,位置更新过程中引入虚拟力步长因子,提出了融合虚拟力步长因子的樽海鞘算法(vgassa),改善了gassa算法部署后的wsn节点分布不均匀的问题。
59、2、本发明所提供的一种面向复杂环境中wsn节点部署的樽海鞘算法,针对复杂环境下的wsn节点在部署过程中移动到障碍物区域内,造成wsn节点无法部署的问题,提出了网格近似化处理和节点移动距离最小的策略,使wsn节点在部署过程中能根据网格近似化得到的障碍物区域信息和移动距离最小的原则实现有效部署。
本文地址:https://www.jishuxx.com/zhuanli/20240801/244676.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表