一种多源信息融合导航制导控制一体机
- 国知局
- 2024-08-02 12:34:03
本发明涉及二维弹道修正引信,具体涉及一种多源信息融合导航制导控制一体机。
背景技术:
1、随着弹道修正引信越来越小型化以及低成本化,总体对引信内部的空间利用提出了更高的要求,同时引信内部集成多种传感器,如何充分融合利用传感器信息也是一个亟待解决的问题。现阶段弹道修正引信中各个分系统都是独立设计,不同系统间的接线复杂且部分模块冗余(比如供电模块、通信接口模块),极大的浪费了内部空间。
技术实现思路
1、有鉴于此,本发明提供了一种多源信息融合导航制导控制一体机,通过合理布局,将弹道修正引信中最关键的三大系统:接收机、弹载计算机、舵机控制器集成在一块电路板上,三大系统通过串口总线进行通信交互,并均由舵机控制器的整流发电模块供电,精简舍弃了冗余供电模块、电压转换模块、通信模块、线束、连接器等模块以及元器件,在一定程度上节约了引信内部的空间,提高了修正引信的可靠性。同时,本发明还可通过接收机子系统设置的prm芯片接收外接加注枪直接注入的军码,继而通过获取北斗b3频点的卫星信号实现军码直捕定位,提高了弹道修正引信的抗干扰、防欺骗能力。此外,本发明一体机还可实现接收机的位置速度姿态测量,并通过融合多源卫星以及外围传感器数据,实现对位置、速度、姿态的最优估计,大幅增强了测量信息的准确性和可靠性。
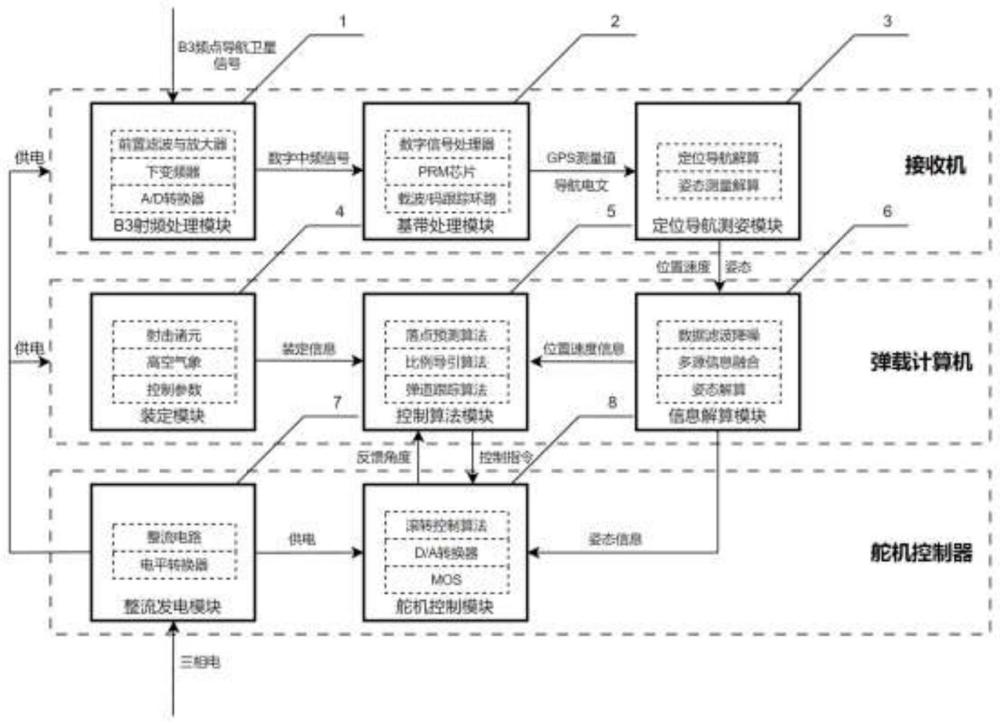
2、本发明的一种多源信息融合导航制导控制一体机,在一块电路板上集成设计接收机子系统、弹载计算机子系统和舵机控制机子系统,各子系统通过串口总线进行通信交互;
3、其中,接收机子系统包括射频处理模块、基带处理模块和定位导航测姿模块;其中,射频处理模块用于将接收到的各导航卫星信号转变成数字中频信号,并将数字中频信号经串口发送至基带处理模块;基带处理模块用于对收到的数字中频信号进行载波剥离和随机码剥离,得到各卫星的测量值和导航电文,并将各卫星测量值和导航电文经串口发送至定位导航测姿模块;定位导航测姿模块基于收到的各卫星测量值和导航电文,进行定位导航解算和姿态测量解算,得到各卫星定位结果和姿态测量结果,并将各卫星定位结果和姿态测量结果经串口发送至弹载计算机子系统;
4、弹载计算机子系统包括装定模块、控制算法模块和信息解算模块;其中,装定模块用于将当前射击参数信息装定进flash中;信息解算模块用于对定位导航测姿模块解算的各卫星的定位结果进行加权融合,得到最终的位置、速度信息并经串口发送至控制算法模块,同时将定位导航测姿模块解算的各卫星的姿态测量结果与其他传感器测量的姿态信息进行加权融合,得到最终的姿态信息,并经串口发送至舵机控制器子系统;控制算法模块根据装定模块装定的射击参数信息、信息解算模块得到的最终的位置、速度信息,以及舵机控制器子系统反馈的舵片角度信息,基于弹道控制算法,生成弹道控制指令,并将控制指令经串口发送至舵机控制器子系统;
5、舵机控制器子系统包括整流发电模块和舵机控制模块;其中,舵机控制模块根据控制算法模块生成的控制指令,以及信息解算模块得到的当前姿态信息,对舵机进行实时控制,并将实际控制的舵片角度反馈给控制算法模块;整流发电模块将舵机旋转产生的三相电进行整流以及电平转换后,供给各子系统。
6、较优的,所述基带处理模块中还包含prm芯片;prm芯片上设有串口,加注枪通过串口向所述prm芯片中加注军码;军码加注时,外部电源同步经该串口为一体机各子系统各模块供电;
7、prm芯片基于注入的军码生成本地军码随机码;射频处理模块将接收到的b3频点北斗卫星信号转变成数字中频信号;基带处理模块基于prm芯片生成的本地军码随机码对b3频点北斗卫星数字中频信号进行载波剥离和随机码剥离,得到b3频点北斗卫星测量值和导航电文;定位导航测姿模块基于该b3频点北斗卫星测量值和导航电文,进行定位导航解算和姿态测量解算,得到b3频点北斗卫星定位结果和姿态测量结果。
8、较优的,所述信息解算模块首先对定位导航测姿模块解算各卫星信号通道得到的接收机定位信息进行滤波处理,剔除掉噪声的干扰以及严重偏离平均值的卫星定位信息;然后基于偏差比较器,将滤波处理后的各卫星的定位信息与理论弹道进行比较,通过判断滤波值与当前理论值的差异,以及过去一段时间滤波值的幅度变化与理论值幅度变化的相合性,对各卫星通道进行权重分配,进而对各卫星通道的定位信息进行加权融合,得到最终的卫星定位信息;
9、信息解算模块对定位导航测姿模块解算各卫星信号通道得到的姿态信息、以及其他传感器测量的弹体姿态信息进行滤波处理,剔除掉噪声的干扰以及严重偏离平均值的姿态信息;然后基于偏差比较器,将滤波处理后的姿态信息与理论弹道进行比较,通过判断姿态信息与当前理论值的差异,以及过去一段时间姿态信息的幅度变化与理论值幅度变化的相合性,对各卫星通道、各传感器进行权重分配,进而对各卫星通道的姿态信息以及传感器的姿态信息进行加权融合,得到最终的姿态信息。
10、较优的,滤波处理时采用分布式非线性卡尔曼滤波。
11、较优的,所述弹道控制算法采用落点预测算法、比例导引算法或弹道跟踪算法。
12、有益效果:
13、(1)本发明通过合理布局,实现接收机、弹载计算机、舵机控制器三大系统在一块电路板上的集成,三大系统共用一套供电模块以及通信模块,精简舍弃了冗余的模块以及元器件,在一定程度上节省了内部空间,为二维弹道修正引信进一步小型化设计奠定了基础。同时由于集成化,舍弃了大量的线束及连接器,精简了之前各系统连接部分这一薄弱结构,增加了一体机的抗过载能力。
14、(2)一体机接收机子系统的基带处理模块中设置prm芯片,所述prm芯片通过串口可外接加注枪,通过加注枪可实现军码星历加注,军码星历加注时,外部电源同步经该串口为一体机各子系统各模块供电。通过改造供电接口实现识别不同电源来源,从而识别不同的工作模式,为弹道修正引信利用军码奠定基础。通过军码直捕流程实现利用军码的快速定位,进一步增强一体机的抗干扰能力。
15、(3)弹载计算机子系统信息解算模块内部设有多信息融合单元,多信息融合单元采用分布式非线性卡尔曼滤波融合算法,对不同来源的位置速度姿态信息进行加权融合,如:融合接收机提供的位置速度信息与装定的理论弹道信息实现位置速度的融合估计,融合接收机提供的姿态测量信息与外接霍尔传感器、地磁传感器等提供的姿态信息实现弹体姿态的融合估计;根据信息的质量设置权重并动态调整,实现信息的最优估计,大幅增强整个系统的稳定性和可靠性。
技术特征:1.一种多源信息融合导航制导控制一体机,其特征在于,在一块电路板上集成设计接收机子系统、弹载计算机子系统和舵机控制机子系统,各子系统通过串口总线进行通信交互;
2.如权利要求1所述的一种多源信息融合导航制导控制一体机,其特征在于,所述基带处理模块(2)中还包含prm芯片;prm芯片上设有串口,加注枪通过串口向所述prm芯片中加注军码;军码加注时,外部电源同步经该串口为一体机各子系统各模块供电;
3.如权利要求1所述的一种多源信息融合导航制导控制一体机,所述信息解算模块(6)首先对定位导航测姿模块(3)解算各卫星信号通道得到的接收机定位信息进行滤波处理,剔除掉噪声的干扰以及严重偏离平均值的卫星定位信息;然后基于偏差比较器,将滤波处理后的各卫星的定位信息与理论弹道进行比较,通过判断滤波值与当前理论值的差异,以及过去一段时间滤波值的幅度变化与理论值幅度变化的相合性,对各卫星通道进行权重分配,进而对各卫星通道的定位信息进行加权融合,得到最终的卫星定位信息;
4.如权利要求3所述的一种多源信息融合导航制导控制一体机,其特征在于,滤波处理时采用分布式非线性卡尔曼滤波。
5.如权利要求1所述的一种多源信息融合导航制导控制一体机,其特征在于,所述弹道控制算法采用落点预测算法、比例导引算法或弹道跟踪算法。
技术总结本发明公开了一种多源信息融合导航制导控制一体机。本发明通过合理布局,将接收机、弹载计算机、舵机控制器集成在一块电路板上,三大子系统通过串口总线进行通信交互,并均由舵机控制器子系统的整流发电模块供电,精简舍弃了冗余模块及元器件,在一定程度上节约了引信内部的空间,提高了修正引信的可靠性。本发明一体机可实现多源的接收机的位置速度姿态测量,并通过融合多源卫星以及外围传感器数据,实现对位置、速度、姿态的最优估计,大幅增强了测量信息的准确性和可靠性。同时,本发明还可通过接收机子系统设置的PRM芯片接收外接加注枪直接注入的军码,继而实现军码直捕定位,提高了弹道修正引信的抗干扰、防欺骗能力。技术研发人员:申强,梁晨,田凌蕴,李红云,邓子龙,陈泽豪,冯恒振受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/236726.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表