基于UWB校正的定位系统、方法及车辆与流程
- 国知局
- 2024-08-02 12:38:12
本发明属于无线电波定位,具体涉及一种基于uwb校正的定位系统、方法及车辆。
背景技术:
1、目前最常见的无线定位技术有超宽频(ultra-wideband,uwb)定位、rssi定位技术等,两者定位方式在定位原理、使用技术、精准度等面都有所差异:
2、uwb定位技术:基于飞行时间(tof),任意两个节点之间距离的估算是基于无线信号的传播时间来实现的。具体地,在该技术中,发射节点发射信号,接收节点接收信号,并且测量信号从发射节点到接收节点的传播时间。该技术至少依赖3个uwb模块,虽然定位精度能够达到10cm以内,但其瞬态功耗大,穿透性较差,且其布设成本较高。
3、rssi定位技术:主要包括wifi定位技术、ble(bluetooth low energy)蓝牙定位,rssi定位技术基于接收信号强度指示(rssi),任意两个节点之间距离的估算是基于接收信号强度来实现的,其功耗低、穿透性优良,建设成本较低,但定位精度比较低,误差在±1.2m内,在数字钥匙、室内定位等领域的应用受限。
技术实现思路
1、本发明意在提供基于uwb校正的定位系统、方法及车辆,以在降低成本的同时保证无线电波定位的定位精度。
2、为了达到上述目的,本发明的一方面在于提供一种基于uwb校正的定位系统及方法:
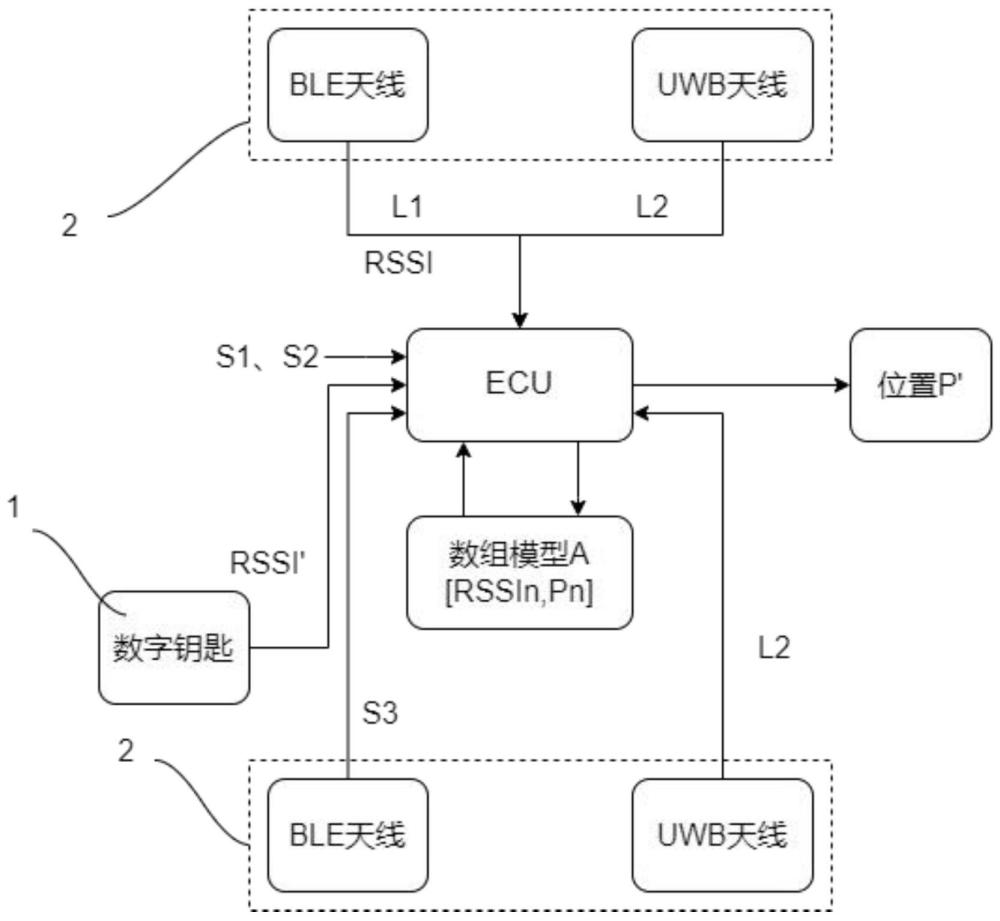
3、定位系统:包括移动模块和至少两组基准模块,基准模块上包括相离设置的rssi天线和uwb天线,基准模块之间相离设置;
4、定位方法,包括以下步骤:
5、扫描:移动模块的uwb天线发送uwb信号、rssi天线发送2.4ghz-5.8ghz的无线电波信号,基准模块扫描移动模块,基准模块的rssi天线和uwb天线分别获取与移动模块的距离l1和l2;
6、解算:用同组基准模块上的rssi天线和uwb天线距离值s1、不同组基准模块之间的uwb天线距离值s2,再结合l2,计算移动模块与基准模块上rssi天线之间的距离值s3;
7、校正:用s3作为校正值替代l1;
8、定位:从至少两组s3和l2中选取至少3个值,定位出移动模块的位置p。
9、可选地,还包括步骤:
10、记录:在扫描步骤中,记录扫描时刻的移动模块rssi天线的rssi1,并同时记录该时刻移动模块的位置p1;移动模块位移,记录位移后的所处时刻的移动模块rssi天线的rssi2和移动模块的位置p2;重复位移移动模块,获取不同位置pn处的移动模块rssi天线的rssin;建立不同位置p处对应的移动模块rssi天线的rssi的数据集;
11、比对定位:获取移动模块rssi天线的rssi′,将rssi′与数据集的rssin进行比对,取出最接近rssi′的rssin对应的pn。
12、可选地,还包括步骤:
13、识别:获取移动模块中rssi天线的id,并将id与对应的数据集关联。
14、可选地,移动模块或者基准模块上还设有计时器、加速度传感器、角速度传感器、气压传感器、磁传感器、gps中的一种或者多种传感器;在不同位置p处,数据集中还记录有前述传感器中的一种或者多种传感数据。
15、可选地,基准模块上rssi天线和uwb天线相离的距离不小2cm,基准模块之间相离的距离不小于5cm。
16、可选地,基准模块处在同一平面或者不同平面上。
17、可选地,在比对定位步骤中,将rssi′与数据集里相邻的m个rssin的平均值进行比对,找出最接近rssi′的所对应的m个rssin,再将该m个rssin逐一与rssi′进行比对,再取出最接近rssi′的rssin对应的pn。
18、本发明的另一方面还在于提供另一种基于uwb校正的定位系统及方法:
19、定位系统:包括移动模块和至少一组基准模块,基准模块上包括相离设置的rssi天线和uwb天线,基准模块之间相离设置;移动模块上设有方位角测量器;
20、定位方法,包括以下步骤:
21、扫描:移动模块的uwb天线发送uwb信号、rssi天线发送2.4ghz-5.8ghz的无线电波信号,基准模块扫描移动模块,基准模块的rssi天线和uwb天线分别获取与移动模块的距离l1和l2;
22、解算:用基准模块上的rssi天线和uwb天线距离值s1、uwb天线与移动模块之间的距离l2,再结合方位角测量器测出的方位角α,计算移动模块与基准模块上rssi天线之间的距离值s3;
23、校正:用s3作为校正值替代l1;
24、定位:根据s3、α和l2定位出移动模块的位置p。
25、可选地,基准模块上包括至少一个ble天线和至少一个uwb天线。
26、本发明的再一方面在于提供一种车辆,包括前述的基于uwb校正的定位系统。
27、本发明利用uwb定位数据去校正rssi的定位数据,然后用校正后的rssi定位数据重定位,不但能够减少uwb模块的使用而大幅降低成本和功耗,而且定位精度能够达到正负±20cm,这种uwb结合并校正rssi的定位技术,定位精度基本接近全uwb模块定位技术,而且也保留了rssi定位技术穿透性强的优势。
28、本发明利用校正后的定位数据集,仅需获取移动模块实时的rssi天线的rssi′,即可获取移动模块实时的、定位精度接近于全uwb定位技术的位置信息pn。
29、本发明可记录了移动模块的使用者,对移动模块的使用习惯,将移动模块的id与数据集关联,当获取id后就可直接调用关联的数据集,可以让数据集一次校正多次使用,并且还能保证定位精度。
技术特征:1.基于uwb校正的定位系统及方法,其特征在于:
2.根据权利要求1所述的基于uwb校正的定位系统及方法,其特征在于:
3.根据权利要求2所述的基于uwb校正的定位系统及方法,其特征在于:还包括步骤:
4.根据权利要求3所述的基于uwb校正的定位系统及方法,其特征在于:移动模块或者基准模块上还设有计时器、加速度传感器、角速度传感器、气压传感器、磁传感器、gps中的一种或者多种传感器;在不同位置p处,数据集中还记录有前述传感器中的一种或者多种传感数据。
5.根据权利要求1所述的基于uwb校正的定位系统及方法,其特征在于:基准模块上rssi天线和uwb天线相离的距离不小1cm,基准模块之间相离的距离不小于5cm。
6.根据权利要求1所述的基于uwb校正的定位系统及方法,其特征在于:基准模块处在同一平面或者不同平面上。
7.根据权利要求2所述的基于uwb校正的定位系统及方法,其特征在于:在比对定位步骤中,将rssi′与数据集里相邻的m个rssin的平均值进行比对,找出最接近rssi′的所对应的m个rssin,再将该m个rssin逐一与rssi′进行比对,再取出最接近rssi′的rssin对应的pn。
8.基于uwb校正的定位系统及方法,其特征在于:
9.根据权利要求1~8中任一项所述的基于uwb校正的定位系统及方法,其特征在于:基准模块上包括至少一个rssi天线和至少一个uwb天线。
10.一种车辆,其特征在于:包括权利要求1~9中任一项所述的基于uwb校正的定位系统。
技术总结本发明属于无线电波定位技术领域,具体涉及基于UWB校正的定位系统、方法及车辆,系统:包括移动模块和基准模块,基准模块上包括相离设置的RSSI天线和UWB天线;定位方法,包括:扫描:移动模块发送无线电波信号和UWB信号,基准模块扫描移动模块,RSSI天线和UWB天线获取移动模块的距离L1和L2;解算:用基准模块上的RSSI天线和UWB天线距离值S1,结合不同组基准模块之间的UWB天线距离值S2,或者L2,或者移动模块相对UWB天线的方位角α,计算移动模块与基准模块上RSSI天线之间的距离值S3;校正:用S3作为校正值替代L1;定位:从至少两组S3和L2中选取至少3个值,定位出移动模块的位置P。本发明利用UWB定位校正RSSI定位,以在降低成本的同时保证无线电波定位的定位精度。技术研发人员:李宗麟,陈方受保护的技术使用者:重庆云辉新能源科技有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/237104.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表