基于超螺旋滑模的高精度直线振荡电机行程观测方法
- 国知局
- 2024-08-05 12:01:12
本发明属于直线振荡电机无位置传感器控制,更具体地,涉及一种基于超螺旋滑模的高精度直线振荡电机行程观测方法。
背景技术:
1、传统旋转式压缩机采用“旋转电机+曲柄连杆”结构,因气缸、曲轴、连杆及活塞间4个摩擦点交互影响,该系统面临摩擦损耗大、噪声大、体积大、行程不可调、系统效率低等问题,难以适应行业及用户对高性能压缩机“小型化、轻型化、高能效、高可靠性”等指标要求。相比之下,由直线振荡电机驱动的线性压缩机具有侧向力小、摩擦点少、机械损耗小、结构简单紧凑、活塞“自由”不受限、行程可调节等优势。然而,由于活塞行程不受限,当电机行程超过最大运行范围时,活塞动子将撞击气缸壁,损耗压缩机系统。因此,有必要对直线振荡电机进行行程闭环控制,以防止撞缸事故,提高系统可靠性。考虑到直线振荡电机与负载气缸高度一体化,采用位置传感器存在安装维护困难、系统体积增大、可靠性降低等问题,因而研究高性能无位置传感器控制策略无疑是提升线性压缩机系统可靠性的最佳选择。
2、反电动势积分法是目前直线振荡电机无位置传感器控制中的常用方法,但因该方法的本质是一种开环计算方法,因此存在对参数变化敏感、观测精度低等问题。滑模变结构控制是一种具有强参数鲁棒、高精度的闭环控制方法,将其用于直线振荡电机活塞行程观测,能够显著提高观测器的精度及参数鲁棒性。然而,现有滑模趋近律采用高频开关信号构建滑模观测器,滑模抖振严重,观测精度有待提高。此外,由观测器观测到的反电动势信号中存在直流分量,纯积分器的使用会使该直流分量不断累积,导致无位置传感器控制无法实现。因此,有必要研究高精度行程观测方法,通过抑制滑模抖振,解决纯积分饱和问题,提高行程观测性能。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于超螺旋滑模的高精度直线振荡电机行程观测方法,大幅提高了现有行程观测方法的精度及参数鲁棒性。
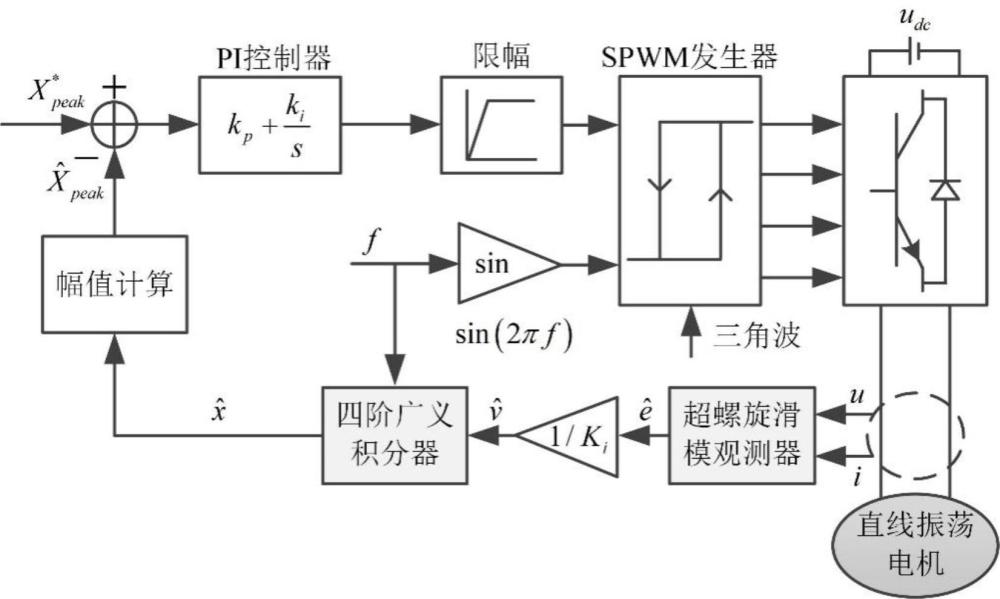
2、为实现上述目的,本发明第一方面提供了一种基于超螺旋滑模的高精度直线振荡电机行程观测方法,包括以下步骤:
3、s1.根据直线振荡电机的电压方程,获取电流状态方程,并构建超螺旋滑模观测器;
4、s2.设计连续函数,推导超螺旋滑模控制律,获得电机反电动势观测信号;
5、s3.根据电机反电动势观测信号与活塞速度观测信号成正比的关系,计算活塞速度观测信号;
6、s4.采用四阶广义积分器作为滤波器,消除活塞速度观测信号的直流分量,获得活塞行程观测信号;
7、s5.将活塞行程观测信号用于行程闭环控制,实现无位置传感器控制。
8、进一步地,步骤s1所述的方法包括:
9、直线振荡电机的电压方程为:
10、,
11、其中,为定子电阻,为定子电感,为电枢电流,为电枢电压,为电枢反电势,t为时间。
12、将电压方程重写为电流状态方程:
13、,
14、构建超螺旋滑模观测器为:
15、,
16、其中,为电枢观测电流,和为超螺旋滑模观测器增益,sgn()为切换函数,s为滑模面,满足,为系统扰动,满足。
17、进一步地,步骤s2所述的方法包括:
18、连续函数的表达式为:
19、,
20、式中,s表示状态变量,exp为指数函数。
21、基于连续函数的表达式,将滑模面s代入函数,构建超螺旋滑模控制律为:
22、,
23、获得的电机反电动势观测信号为:
24、。
25、进一步地,步骤s3所述的电机反电动势观测信号与活塞速度观测信号的关系为:
26、,
27、其中,为电磁推力。
28、进一步地,步骤s4中四阶广义积分器的传递函数为:
29、,
30、,
31、其中,为前向传递函数,为正交传递函数,s为状态变量,为滤波器的输入信号,和分别为滤波器的输出信号和正交信号,和为增益系数,为滤波器的中心频率。四阶广义积分器在中心频率处具有强滤波特性,只允许基频信号通过,而将其余谐波信号滤除。因此,采用四阶广义积分器能够将低频的直流分量滤除,只保留电机运行频率的基频信号,从而完全消除直流分量的影响,解决传统纯积分器饱和问题。
32、进一步地,步骤s5中将四阶广义积分器输出的行程信号用于活塞行程闭环控制。因此,本文所提方法可实现直线振荡电机无位置传感器控制。
33、本发明另一方面还提供了一种基于超螺旋滑模的高精度直线振荡电机无位置传感器控制系统,包括:计算机可读存储介质和处理器;
34、所述计算机可读存储介质用于存储可执行指令;
35、所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行本发明第一方面所述的基于超螺旋滑模的高精度直线振荡电机行程观测方法。
36、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有下列有益效果:
37、本发明提供的直线振荡电机行程观测方法与现有方法相比,具有参数鲁棒性强、观测精度高等优点;采用连续函数t(s)代替一般sign(s)函数,将不连续信号转化为连续信号,能够削弱滑模抖振,提高观测器性能;采用四阶广义积分器代替纯积分器,能够彻底解决纯积分饱和问题,进一步提高行程观测精度,显著提升直线振荡电机无位置传感器控制性能。
技术特征:1.一种基于超螺旋滑模的高精度直线振荡电机行程观测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于超螺旋滑模的高精度直线振荡电机行程观测方法,其特征在于,所述步骤s1中直线振荡电机的电压方程为:
3.根据权利要求1所述的基于超螺旋滑模的高精度直线振荡电机行程观测方法,其特征在于,所述步骤s2中,连续函数的表达式为:
4.根据权利要求1所述的基于超螺旋滑模的高精度直线振荡电机行程观测方法,其特征在于,所述步骤s3中,电机反电动势观测信号与活塞速度观测信号的关系为:
5.根据权利要求1所述的基于超螺旋滑模的高精度直线振荡电机行程观测方法,其特征在于,所述步骤s4中,四阶广义积分器的传递函数为:
6.一种基于超螺旋滑模的高精度直线振荡电机行程观测系统,其特征在于,包括:计算机可读存储介质和处理器;
技术总结本发明公开了一种基于超螺旋滑模的高精度直线振荡电机行程观测方法,属于直线振荡电机无位置传感器控制技术领域,所述方法首先根据直线振荡电机的电压方程,获取电流状态方程,并构建超螺旋滑模观测器;设计连续函数,推导超螺旋滑模控制律,获得电机反电动势观测信号;根据电机反电动势观测信号与活塞速度观测信号成正比的关系,计算活塞速度观测信号;采用四阶广义积分器作为滤波器,消除活塞速度观测信号的直流分量,获得活塞行程观测信号;将活塞行程观测信号用于行程闭环控制,实现无位置传感器控制。本发明所提观测器能够大幅提高行程观测精度,彻底解决纯积分饱和影响,显著提升直线振荡电机无位置传感器控制性能。技术研发人员:廖凯举,徐伟,王珂受保护的技术使用者:中国科学院电工研究所技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260633.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。