基于深度学习与多回波加密三角网的大坝微形变检测方法
- 国知局
- 2024-09-05 14:28:49
本发明涉及大坝微形变检测,尤其涉及一种基于深度学习与多回波加密三角网的大坝微形变检测方法。
背景技术:
1、点云配准是点云处理技术的一个重要组成部分,广泛应用于三维重建、医学图像、机器人导航。现有的点云配准技术主要分为两类:基于优化的方法和基于特征的方法。
2、基于优化的方法是通过最小化点云之间的距离或误差函数来求解变换矩阵,通常使用迭代最近点算法、正态分布算法。这类方法的缺点是:
3、对于两片点云的初始位置要求较为严格,否则容易陷入局部最优或者无法收敛。容易受到高斯噪声和离群点的影响,导致运行速度缓慢、配准精度降低。不适用于非刚性物体或者形变较大的物体的配准。
4、基于特征的方法是通过提取点云的局部或全局特征,然后通过特征匹配来确定点云之间的对应关系,通常使用三维形状上下文、点特征直方图、快速点特征直方图。但是,这类方法的缺点是:
5、特征提取和匹配的过程比较复杂,计算量较大。特征的选择和描述对配准结果的影响较大,需要根据不同的场景和数据进行调整。特征的鲁棒性和区分度有限,可能导致错误的匹配或者无法匹配。
6、现有的点云配准技术都存在一定的局限性和不足,难以满足大坝微形变监测的高效性和精确性的要求。因此,如何提供一种基于深度学习与多回波加密三角网的大坝微形变检测方法是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的一个目的在于提出一种基于深度学习与多回波加密三角网的大坝微形变检测方法,本发明可以克服现有技术中的噪声、异常值、部分重叠、密度差异和尺度变化等问题,实现高精度、高鲁棒性和高效率的大坝微形变检测。
2、根据本发明实施例的一种基于深度学习与多回波加密三角网的大坝微形变检测方法,包括如下步骤:
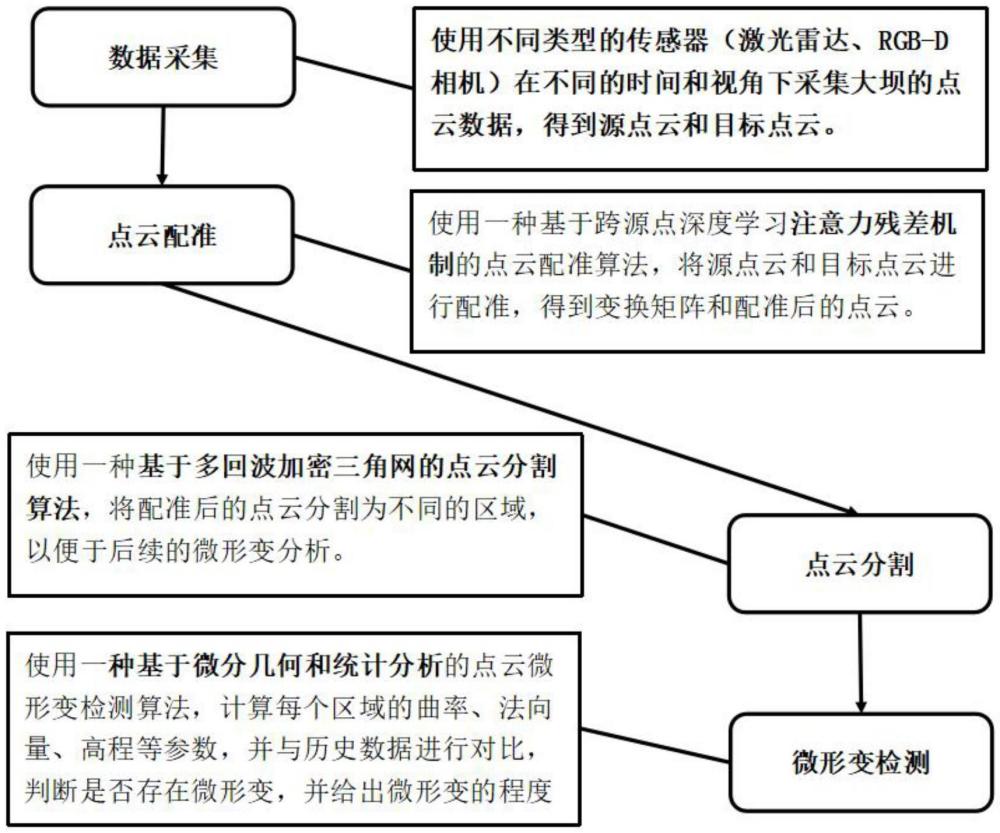
3、s1、使用不同类型的传感器在不同的时间和视角下采集大坝的点云数据,得到源点云和目标点云;
4、s2、使用基于跨源点深度学习注意力残差机制的点云配准算法,将源点云和目标点云进行配准,得到变换矩阵和配准后的点云;
5、s3、使用基于多回波加密三角网的点云分割算法,将配准后的点云分割为不同的区域;
6、s4、使用基于微分几何和统计分析的点云微形变检测算法,计算每个区域的曲率、法向量和高程参数,并与历史数据进行对比,判断是否存在微形变,并给出微形变的程度和位置。
7、可选的,所述s2具体包括:
8、s21、计算源点云和目标点云的k邻近图,分别进行边卷积操作,提取点云的局部特征,边卷积是一种基于图的卷积操作,根据点云的拓扑结构和几何特征,生成每个点的局部描述符,边卷积的公式如下:
9、
10、其中,xi和xj分别表示源点云或目标点云中的点,表示xi的k邻近点集合,fθ和hθ分别表示边卷积的输出函数和核函数,θ表示可学习的参数;
11、s22、使用残差注意力机制对点云的局部特征进行加权,增强点云的全局特征,残差注意力机制根据点云的语义信息和重要性,分配不同的注意力权重,提升点云的全局表达能力,残差注意力机制的公式如下:
12、fatt(xi)=fθ(xi)+fθ(xi)⊙σ(wafθ(xi)+ba);
13、其中,fatt(xi)表示加入残差注意力机制后的点云特征,fθ(xi)表示边卷积后的点云特征,⊙表示哈达玛积,逐元素相乘,σ表示激活函数,wa和ba表示可学习的权重矩阵和偏置向量;
14、s23、使用transformer结构对点云的全局特征进行自注意力和互注意力,实现点云的语义对齐,transformer根据点云的上下文信息和相关性,生成每个点的语义表示,transformer的核心组件是多头自注意力模块,将点云特征分为多个子空间,分别计算不同的注意力权重:
15、multihead(q,k,v)=concat(head1,…,headh)wo;
16、
17、其中,q,k和v分别表示查询,键和值矩阵,是相同或不同的点云特征,wo,和分别表示可学习的线性变换矩阵,h表示头的数量,dk表示键的维度,concat表示拼接操作,softmax表示归一化操作,transformer结构通常包括编码器和解码器两部分,编码器使用自注意力模块对源点云和目标点云进行编码,解码器使用互注意力模块对源点云和目标点云进行对齐;
18、s24、使用软指针网络对点云的语义对齐特征进行匹配,得到点云的对应关系,软指针网络根据点云的语义特征,生成每个点的对应概率,从而实现点云的软对应:
19、
20、sij=fatt(xi)wsfatt(yj);
21、其中,pij表示源点云中的点xi与目标点云中的点yj的对应概率,sij表示点xi和点yj的相似度,fatt表示加入残差注意力机制后的点云特征,ws表示可学习的权重矩阵;
22、s25、使用可微的奇异值分解方法根据点云的对应关系求解刚性变换矩阵,完成点云的配准,可微的svd方法根据点云的软对应概率,求解最优的旋转矩阵和平移向量:
23、
24、r=uvt;
25、u,σ,v=svd(m);
26、
27、其中,r和t分别表示旋转矩阵和平移向量,u,σ和v分别表示奇异值分解后的矩阵,m表示点云的协方差矩阵,svd表示奇异值分解操作。
28、可选的,所述s3具体包括:
29、s31、根据点云的位置和法向量信息,构建加密三角网,将点云转化为三角面片,加密三角网是一种基于点云的拓扑结构和几何特征:
30、
31、其中,表示加密三角网,xi表示点云中的点,表示xi在上的投影点,λ表示平衡参数,area(t)表示三角形t的面积,公式的目标是使加密三角网尽可能地拟合点云,同时保持三角网的简洁性;
32、s32、根据三角面片的多回波信息,计算每个三角面片的反射强度和反射次数,作为点云的属性特征,多回波是指激光雷达在遇到透明或半透明的物体时,产生多次的反射信号的现象,多回波信息反映点云的材质、密度和粗糙度,多回波信息的公式如下:
33、it=∑i∈tii;
34、nt=∑i∈tni;
35、其中,it和nt分别表示三角面片t的反射强度和反射次数,ii和ni分别表示点xi的反射强度和反射次数,t表示包含点xi的三角面片;
36、s33、使用基于图卷积的深度神经网络对点云的属性特征进行学习,得到点云的语义特征,图卷积根据点云的结构信息和邻域信息,生成每个点的语义表示,图卷积的公式如下:
37、
38、其中,fθ和hθ分别表示图卷积的输出函数和核函数,θ表示可学习的参数,wij表示点xi和点xj的权重,表示xi的邻域点集合,图卷积堆叠多层,以提取不同深度的语义特征;
39、s34、使用基于条件随机场的优化方法对点云的语义特征进行后处理,得到点云的分割结果,条件随机场根据点云的语义特征和空间关系,生成每个点的类别标签,条件随机场的公式如下:
40、
41、其中,y表示点云的类别标签向量,e(y)表示能量函数,ψu和ψp分别表示一元势函数和二元势函数,ε表示点云的边集合,一元势函数表示点云的语义特征与类别标签的匹配程度,二元势函数表示点云的空间关系与类别标签的一致性。
42、可选的,所述s4具体包括:
43、s41、对每个区域的点云,使用最小二乘法拟合一个二次曲面,得到点云的曲率和法向量,根据点云的位置信息,求解最优的二次曲面参数,从而得到点云的曲率和法向量:
44、
45、其中,a,b,c,d,e,f表示二次曲面的参数,xi,yi,zi表示点云中的点的坐标,n表示点云的数量;
46、s42、对每个区域的点云,使用最小二乘法拟合一个平面,得到点云的高程,最小二乘法用于拟合平面,根据点云的位置信息,求解最优的平面参数,从而得到点云的高程,最小二乘法的公式如下:
47、
48、其中,a,b,c表示平面的参数,xi,yi,zi表示点云中的点的坐标,n表示点云的数量,根据平面的参数,计算点云的高程的公式如下:
49、hi=axi+byi+c;
50、其中,hi表示点云中的点的高程;
51、s43、对每个区域的点云,使用历史数据作为参考,计算点云的曲率、法向量和高程的变化量,作为点云的微形变指标,历史数据是指在同一位置和视角下,之前采集的点云数据,作为点云的基准,用于比较点云的变化情况,点云的曲率、法向量和高程的变化量的公式如下:
52、
53、其中,δκi,δni和δhi分别表示点云中的点的曲率、法向量和高程的变化量,和分别表示历史数据中的点的曲率、法向量和高程;
54、s44、对每个区域的点云,使用阈值法或异常检测方法,根据点云的微形变指标,判断是否存在微形变,并给出微形变的程度和位置。
55、可选的,根据二次曲面的参数,计算点云的曲率和法向量的公式如下:
56、
57、其中,κi和ni分别表示点云中的点的曲率和法向量。
58、可选的,所述阈值法是一种基于经验或专家知识的判断方法,根据点云的微形变指标,与预设的阈值进行比较,从而判断是否存在微形变,并给出微形变的程度和位置,阈值法的公式如下:
59、if|δκi|>τκor|δni|>τn or|δhi|>τh then微形变else正常;
60、其中,τκ,τn和τh分别表示曲率、法向量和高程的阈值,微形变和正常分别表示点云的状态,异常检测方法是一种基于统计或机器学习的判断方法,根据点云的微形变指标,与正常数据的分布进行比较,从而判断是否存在微形变,并给出微形变的程度和位置,异常检测方法的公式如下:
61、ifp(δκi,δni,δhi)<αthen微形变else正常;
62、其中,p(δκi,δni,δhi)表示点云的微形变指标的概率密度函数,α表示异常检测的置信水平,微形变和正常分别表示点云的状态。
63、本发明的有益效果是:
64、(1)本专利提供了一种基于跨源点深度学习云配准与多回波加密三角网的大坝微形变检测方法,该方法可以克服现有技术中的噪声、异常值、部分重叠、密度差异和尺度变化问题,实现高精度、高鲁棒性和高效率的大坝微形变检测。
65、(2)本发明利用不同类型的传感器数据,提高点云的信息量和覆盖范围,同时减少数据采集的成本和时间。
66、(3)本发明使用一种基于跨源点深度学习的点云配准算法,将源点云和目标点云进行配准,得到变换矩阵和配准后的点云。该算法可以有效地提取和利用点云的局部和全局特征,实现点云的语义对齐和匹配,求解刚性变换矩阵,完成点云的配准。该算法的精度和鲁棒性优于现有的跨源点云配准算法。
67、(4)本发明使用一种基于多回波加密三角网的点云分割算法,将配准后的点云分割为不同的区域,以便于后续的微形变分析。该算法可以有效地将点云转化为三角面片,计算点云的反射强度和反射次数,学习点云的语义特征,后处理点云的语义特征,得到点云的分割结果。该算法的分割效果和一致性优于现有的点云分割算法。
68、(5)本发明使用一种基于微分几何和统计分析的点云微形变检测算法,计算每个区域的曲率、法向量、高程等参数,并与历史数据进行对比,判断是否存在微形变,并给出微形变的程度和位置。该算法可以有效地计算点云的曲率、法向量和高程,降低点云的噪声和异常值的影响,计算点云的微形变指标,判断点云的微形变,给出微形变的程度和位置。该算法的检测效果和准确性优于现有的点云微形变检测算法。
69、(6)本发明为大坝的安全运行和维护提供有效的技术支持,及时发现和预警大坝的微形变,减少大坝的安全风险,保障水利工程的安全和稳定。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286655.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。