在传感器测量结果中检测幽灵对象的方法与流程
- 国知局
- 2024-09-11 14:37:23
本发明涉及一种在车辆环境的传感器测量结果中检测幽灵对象的方法。
背景技术:
1、从de 10 2020 124 236 a1已知一种用于车辆的雷达系统的方法,具有以下步骤:
2、-使用车辆的雷达系统识别两个或更多个对象;
3、-启动轨迹数据库中的两个或更多个对象的轨迹,其中这些轨迹分别存储两个或更多个对象的数据并基于两个或更多个对象的附加检测进行更新,以及两个或更多个对象的轨迹最初为在轨迹数据库中的未分类的轨迹;
4、-使用处理器从轨迹数据库中选择与两个或更多个对象中的两个对象相对应的两条轨迹作为候选对;
5、-使用处理器将标准应用于候选对,以确定是否候选对的两条轨迹中的一条轨迹是由多径反射导致的幽灵对象的轨迹以及候选对的两条轨迹中的另一轨迹是与幽灵对象对应的真实对象的轨迹,其中幽灵对象表示在不正确位置检测到真实对象;
6、-在轨迹数据库中使用处理器,基于确定候选对的两条轨迹中的一条轨迹是幽灵对象的轨迹以及候选对的两条轨迹中的另一轨迹是与幽灵对象对应的真实对象的轨迹,将候选对分类为真实对象-幽灵对象对的轨迹;以及
7、-报告来自轨迹数据库的信息,并且基于该分类,该报告包括仅提供真实对象的轨迹的数据,其中该信息用于控制车辆的操作。
技术实现思路
1、本发明的目的在于给出一种新方法,用于在车辆环境的传感器测量结果中检测幽灵对象。
2、根据本发明,该目的通过一种具有权利要求1所述特征的方法来实现。
3、本发明的有利的设计方案是从属权利要求的主题。
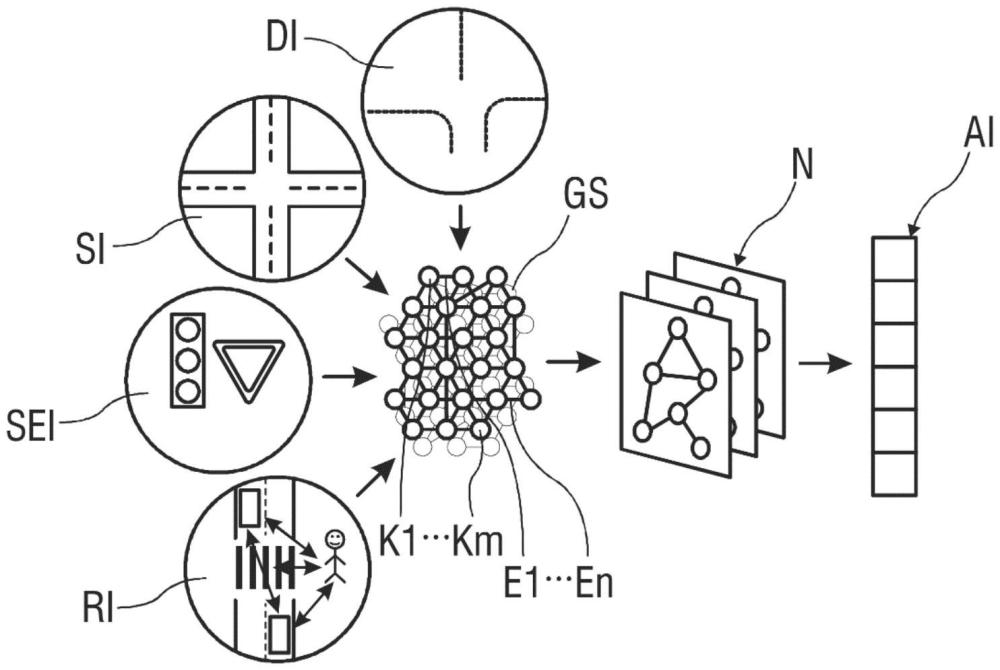
4、在车辆环境的传感器测量结果中检测幽灵对象的方法中,根据本发明,从数字道路地图中获取地图背景信息,识别车辆环境中具有相关属性的对象,并且生成对象彼此间的社会背景信息。将具有车辆和对象的交通状况的所有可用数据存储在一个包括节点和边的图形结构中,其中关系信息通过所述边被反映到该图形结构中。在考虑地图背景信息和社会背景信息的情况下,在图形结构的特征中搜索异常和模式,并且根据识别出的异常和模式对幽灵对象进行分类。
5、对于车辆的自动驾驶模式,特别是高度自动或自主的驾驶模式,需要对车辆环境中的对象进行精确识别。为了满足自动驾驶模式的高安全要求,例如根据标准sae j3016的第2级、第3级、第4级和第5级,需要进行各种传感器形式/形态——例如摄像头传感器、雷达传感器和/或激光雷达传感器——的传感器测量。在此,传感器形式特别地与几个相似和/或不同的传感器形式形成冗余传感器系统。传感器形式的传感器测量在此单独利用,或合并利用。
6、为了实现最大可能的安全性,车辆对对象做出反应的延迟时间必须尽可能短。出于此原因,少数几个传感器测量或每个单独的传感器测量都能引发系统反应。除了真正例测量结果,在传感器测量中还有假正例测量结果,假正例测量结果是指在实际上没有对象的位置处识别出对象。假正例测量结果可以例如由不期望的传感器反射、错误检测和/或检测到环境对象的图像(例如,广告牌上展示的车辆)而产生。一个典型的示例是护栏或门架式标志牌处的雷达反射。
7、自动驾驶车辆从这种假正例测量结果中生成对象。由于该对象在现实中并不存在,因此一般将这种对象称为幽灵对象。自动驾驶车辆对幽灵对象的反应可以导致危险情况,例如导致紧急制动,从而造成追尾事故。
8、通过本发明的方法可以特别有效且可靠地检测幽灵对象。由于该方法使用的是交通状况或场景中所有对象的信息,因此可以针对某个对象确定其属性相比周围对象是否表现出异常。由于该方法使用的是背景信息来对场景进行全面映射,因此可以实现基于背景的对象分类,在该分类中例如使用基础道路网络。通过该方法还可行的是考虑时间方面的因素,以便提取有关时间维度的模式。
9、由此,该方法使得能够以高灵敏度检测车辆环境,随后识别幽灵对象(即,假正例测量),并将其从检测中移除。由此降低未检测到环境中的真实对象的风险。这意味着假负例测量结果和假正例测量结果的概率大大降低。
10、在该方法的一个可行的设计方案中设置为将该分类扩展为基于学习的分类,这使得提取无法手动定义的复杂模式成为可能。由此进一步得出结论,即该方法和执行该方法的系统是可随数据扩展的。
技术特征:1.一种在车辆环境的传感器测量结果中检测幽灵对象的方法,
2.根据权利要求1所述的方法,
3.根据权利要求1或2所述的方法,
4.根据前述权利要求中任一项所述的方法,
5.根据前述权利要求中任一项所述的方法,
技术总结本发明涉及一种在车辆环境的传感器测量结果中检测幽灵对象的方法。根据本发明,从数字道路地图中获取地图背景信息。识别车辆环境中具有相关属性的对象(O),并且生成对象(O)彼此间的社会背景信息。将具有该车辆和该对象(O)的交通状况的所有可用数据存储在包括节点(K1至Km)和边(E1至En)的图形结构(GS)中,其中关系信息(RI)通过边(E1至En)被反映到图形结构(GS)中。考虑到该地图背景信息和该社会背景信息,在图形结构(GS)的特征中搜索异常和模式,其中根据识别出的异常和模式对幽灵对象进行分类。技术研发人员:T·蒙宁格,J·施密特,J·鲁普雷希特,D·拉巴,T·韦尔茨受保护的技术使用者:梅赛德斯-奔驰集团股份公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/291615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表