基于时间同步的传感器数据采集方法、装置、设备及介质与流程
- 国知局
- 2024-10-09 15:43:43
本技术涉及传感器数据采集,特别涉及一种基于时间同步的传感器数据采集方法、装置、设备及介质。
背景技术:
1、目前,随着自动驾驶领域技术的快速发展,单一的传感器已经不能满足智能驾驶的要求。自动驾驶车辆所需要的传感器越来越多,包括激光雷达、摄像头、毫米波雷达、rtk(real time kinematic,载波相位差分技术)定位等,而这些传感器的采集频率往往都是不一样的,这就会导致多种传感器在采集的时间同步上存在差异,导致数据回放和验证的可信度低,不能满足自动驾驶测试过程的数据分析需求。
2、相关技术中,主要通过硬件脉冲信号的方式实现多传感器时间同步。基于硬件脉冲信号的方式实现多传感器时间同步的方式主要包括gnss(global navigationsatellite system,全球导航卫星系统)同步、ntp(network time protocol,网络时间协议)/ptp(precision time protocol,精密时间协议)同步等方案。
3、然而,这些方案都需要硬件支持,成本代价较高,同时,如gps(globalpositioning system,全球定位系统)和imu(inertial measurement unit,惯性测量单元)等传感器采样速率相差较大,会造成采样率高的部分数据缺失,可靠性不高,亟待解决。
技术实现思路
1、本技术提供一种基于时间同步的传感器数据采集方法、装置、设备及介质,以解决如何对采集频率与采样时间不同的传感器数据进行时间同步的问题,有效的提高了数据采集时间同步的精度,并且无需添加硬件实施成本低,适用范围广。
2、为达到上述目的,本技术第一方面实施例提出一种基于时间同步的传感器数据采集方法,包括以下步骤:
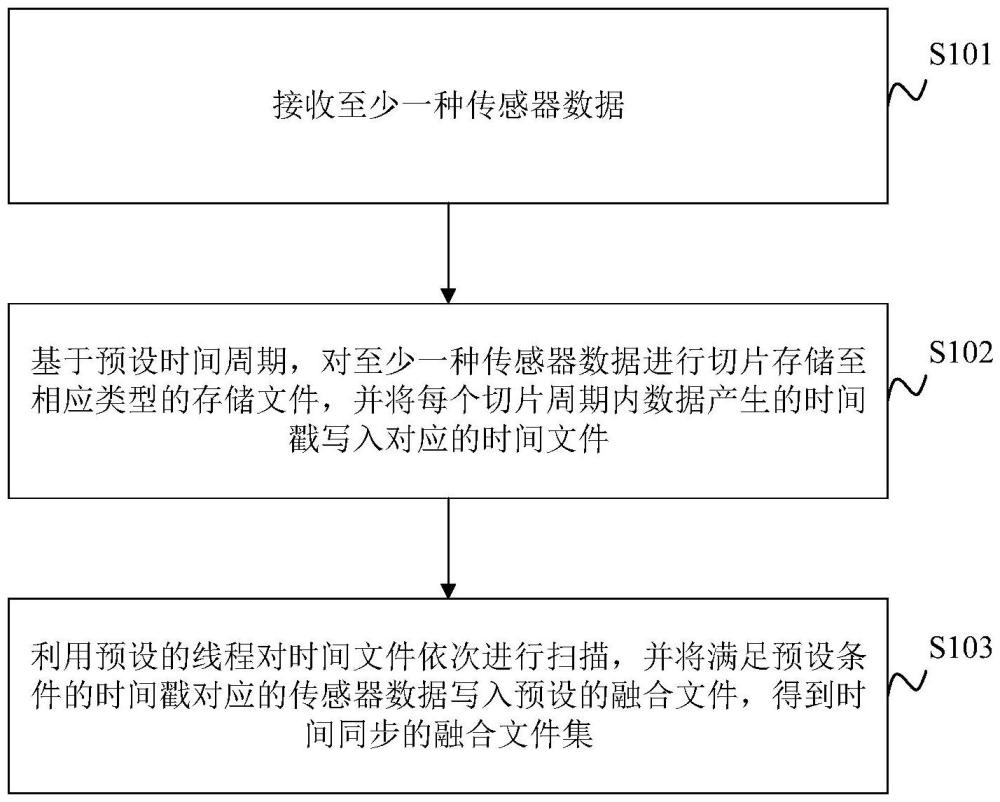
3、接收至少一种传感器数据;
4、基于预设时间周期,对所述至少一种传感器数据进行切片存储至相应类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件;
5、利用预设的线程对所述时间文件依次进行扫描,并将满足预设条件的时间戳对应的传感器数据写入预设的融合文件,得到时间同步的融合文件集。
6、根据本技术的一个实施例,所述至少一种传感器数据包括但不限于激光雷达数据、摄像头数据、rtk设备数据和毫米雷达波数据。
7、根据本技术的一个实施例,所述至少一种传感器数据为激光雷达数据时,所述基于预设时间周期,对所述至少一种传感器数据进行切片存储至多种类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件,包括:
8、基于所述预设时间周期,通过数据采集软件对所述激光雷达数据进行切片存储至点云存储文件切片,得到多个点云存储切片周期;
9、基于所述多个点云存储切片周期,将每个点云存储切片周期内点云帧的第一帧的点云时间戳写入对应的lidar时间文件。
10、根据本技术的一个实施例,所述至少一种传感器数据为摄像头数据时,所述基于预设时间周期,对所述至少一种传感器数据进行切片存储至多种类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件,包括:
11、基于所述预设时间周期,通过数据采集软件对所述摄像头数据进行切片存储至图像存储文件切片,得到多个图像存储切片周期;
12、基于所述多个图像存储切片周期,将每个图像存储切片周期内图像数据的出图时间戳写入对应的camera时间文件。
13、根据本技术的一个实施例,所述至少一种传感器数据为rtk设备数据时,所述基于预设时间周期,对所述至少一种传感器数据进行切片存储至多种类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件,包括:
14、基于所述预设时间周期,通过数据采集软件对所述rtk设备数据进行切片存储至rtk存储文件切片,得到多个rtk存储切片周期;
15、基于所述多个rtk存储切片周期,将每个rtk存储切片周期内rtk数据的时间戳写入对应的rtk时间文件。
16、根据本技术的一个实施例,所述至少一种传感器数据为毫米雷达波数据时,所述基于预设时间周期,对所述至少一种传感器数据进行切片存储至多种类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件,包括:
17、基于所述预设时间周期,通过数据采集软件对所述毫米雷达波数据进行切片存储至radar存储文件切片,得到多个radar存储切片周期;
18、基于所述多个radar存储切片周期,将每个radar存储切片周期内radar数据的时间戳写入对应的radar时间文件。
19、根据本技术实施例提出的基于时间同步的传感器数据采集方法,通过基于预设时间周期,对至少一种传感器数据进行切片存储至相应类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件;利用预设的线程对时间文件依次进行扫描,并将满足预设条件的时间戳对应的传感器数据写入预设的融合文件,得到时间同步的融合文件集。由此,解决了如何对采集频率与采样时间不同的传感器数据进行时间同步的问题,有效的提高了数据采集时间同步的精度,并且无需添加硬件实施成本低,适用范围广。
20、为达到上述目的,本技术第二方面实施例提出一种基于时间同步的传感器数据采集装置,包括:
21、接收模块,用于接收至少一种传感器数据;
22、第一处理模块,用于基于预设时间周期,对所述至少一种传感器数据进行切片存储至相应类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件;
23、第二处理模块,用于利用预设的线程对所述时间文件依次进行扫描,并将满足预设条件的时间戳对应的传感器数据写入预设的融合文件,得到时间同步的融合文件集。
24、根据本技术的一个实施例,所述至少一种传感器数据包括但不限于激光雷达数据、摄像头数据、rtk设备数据和毫米雷达波数据。
25、根据本技术的一个实施例,所述至少一种传感器数据为激光雷达数据时,所述第一处理模块,具体用于:
26、基于所述预设时间周期,通过数据采集软件对所述激光雷达数据进行切片存储至点云存储文件切片,得到多个点云存储切片周期;
27、基于所述多个点云存储切片周期,将每个点云存储切片周期内点云帧的第一帧的点云时间戳写入对应的lidar时间文件。
28、根据本技术的一个实施例,所述至少一种传感器数据为摄像头数据时,所述第一处理模块,具体用于:
29、基于所述预设时间周期,通过数据采集软件对所述摄像头数据进行切片存储至图像存储文件切片,得到多个图像存储切片周期;
30、基于所述多个图像存储切片周期,将每个图像存储切片周期内图像数据的出图时间戳写入对应的camera时间文件。
31、根据本技术的一个实施例,所述至少一种传感器数据为rtk设备数据时,所述第一处理模块,具体用于:
32、基于所述预设时间周期,通过数据采集软件对所述rtk设备数据进行切片存储至rtk存储文件切片,得到多个rtk存储切片周期;
33、基于所述多个rtk存储切片周期,将每个rtk存储切片周期内rtk数据的时间戳写入对应的rtk时间文件。
34、根据本技术的一个实施例,所述至少一种传感器数据为rtk设备数据时,所述第一处理模块,具体用于:
35、基于所述预设时间周期,通过数据采集软件对所述毫米雷达波数据进行切片存储至radar存储文件切片,得到多个radar存储切片周期;
36、基于所述多个radar存储切片周期,将每个radar存储切片周期内radar数据的时间戳写入对应的radar时间文件。
37、根据本技术实施例提出的基于时间同步的传感器数据采集装置,通过基于预设时间周期,对至少一种传感器数据进行切片存储至相应类型的存储文件,并将每个切片周期内数据产生的时间戳写入对应的时间文件;利用预设的线程对时间文件依次进行扫描,并将满足预设条件的时间戳对应的传感器数据写入预设的融合文件,得到时间同步的融合文件集。由此,解决了如何对采集频率与采样时间不同的传感器数据进行时间同步的问题,有效的提高了数据采集时间同步的精度,并且无需添加硬件实施成本低,适用范围广。
38、为达到上述目的,本技术第三方面实施例提出一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的基于时间同步的传感器数据采集方法。
39、为达到上述目的,本技术第四方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的基于时间同步的传感器数据采集方法。
40、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240929/309783.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表