基于激光雷达建模的地坪平整度获取方法及系统与流程
- 国知局
- 2024-11-06 14:45:15
本发明涉及一种基于激光雷达建模的地坪平整度获取方法及系统。
背景技术:
1、适用于室内环境扫描的3d激光扫描仪多采用tof(time-of-flight)测距技术,其中最常用的是lidar(light detection and ranging)。它是一种通过测量发送和收到的脉冲信号的时间差来计算物体距离的光学遥感技术。它的优势在于精度高、距离远;但它也受限于一切光的物理特质,如,lidar很难测量传感器到窗户的距离(光穿过玻璃会折射),lidar无法扫描墙体后面的结构(光沿直线传播)等。另外,lidar的精度也受被摄物体的材质、与扫描仪之间的距离和入射角度影响。
2、适用于室内环境扫描的3d激光扫描仪主要分为手持式和固定式。手持式设备轻巧便携并且内置自定位功能,操作人员可在扫描的同时移动它,因此该技术路线并不被遮挡问题困扰。固定式扫描仪由三脚架支持,通过旋转底座,采集以该点为球心的光束可以到达的360°视野的数据。因存在遮挡问题,操作人员通常需要在不同地方进行多次的拼接和扫描才能收集到该空间的全部细节。
3、所谓实测实量,是指应用测量工具,通过现场测试、测量并能真实反映产品质量数据的一种方法。根据相关的质量验收标准,计量控制工程质量数据误差在国家住房建设标准允许的范围内。
4、现有技术中,对地面点云获取后,无法利用获取的数据对实际场地进行整改,获取的数据与实际场地难于对应匹配,现场整改效率低。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中点无法利用获取的数据对实际场地进行整改,获取的数据与实际场地难于对应匹配,现场整改效率低的缺陷,提供一种能够获取地面水平度和平整度的测量方式,并结合ar装置进行显示,提高地面整改效率的基于激光雷达建模的地坪平整度获取方法及系统。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种基于激光雷达建模的地面平整度获取方法,其特点在于,所述地面平整度获取方法包括:
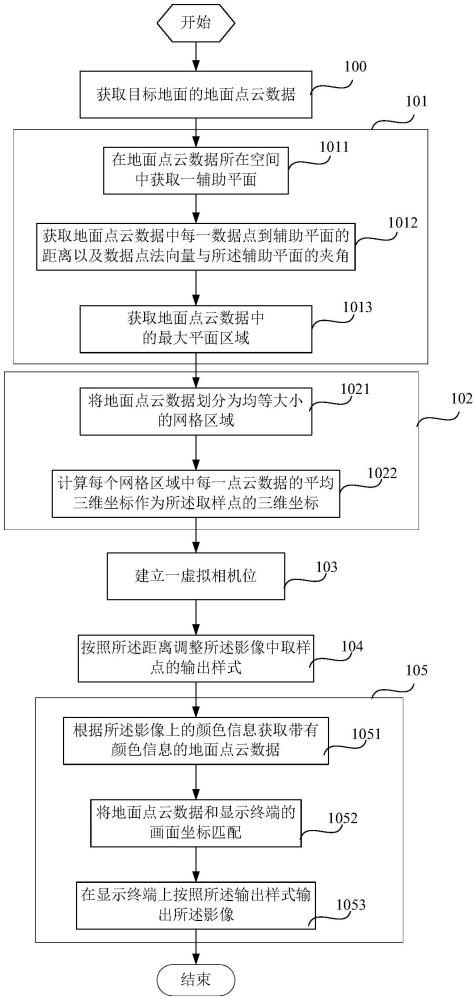
4、获取目标地面的地面点云数据;
5、获取地面点云数据中的最大平面区域;
6、获取地面点云数据中每一取样点到最大平面区域的距离;
7、建立一虚拟相机位,从虚拟相机位获取地面点云数据的影像;
8、按照所述距离调整所述影像中取样点的输出样式;
9、在显示终端上按照所述输出样式输出所述影像。
10、较佳地,所述获取地面点云数据中每一取样点到最大平面区域的距离,包括:
11、将地面点云数据划分为均等大小的网格区域;
12、计算每个网格区域中每一点云数据的平均三维坐标作为所述取样点的三维坐标。
13、较佳地,所述输出样式为颜色,所述在显示终端上按照所述输出样式输出所述影像,包括:
14、根据所述影像上的颜色信息获取带有颜色信息的地面点云数据;
15、将地面点云数据和显示终端的画面坐标匹配,所述显示终端为ar相机装置;
16、在显示终端上按照所述输出样式输出所述影像。
17、较佳地,所述地面平整度获取方法包括:
18、根据地面点云数据的范围以及所述最大平面区域的位置获取所述虚拟相机位;
19、获取虚拟相机位与地面点云数据的转换矩阵;
20、利用所述转换矩阵获取带有颜色信息的地面点云数据。
21、较佳地,所述目标地面上设有标靶,所述将地面点云数据和显示终端的画面坐标匹配,包括:
22、检测地面点云数据中的标靶点云以及显示终端的画面中标靶像素点;
23、利用标靶点云和标靶像素点将地面点云数据和显示终端的画面坐标匹配;
24、将地面点云数据嵌入显示终端的画面中进行重叠显示。
25、较佳地,所述将地面点云数据和显示终端的画面坐标匹配,包括:
26、识别地面点云数据中的点云特征点;
27、识别显示终端的画面中与点云特征点对应的标靶像素点;
28、利用点云特征点和标靶像素点将地面点云数据和显示终端的画面坐标匹配;
29、将地面点云数据嵌入显示终端的画面中进行重叠显示。
30、较佳地,所述获取地面点云数据中的最大平面区域,包括:
31、在地面点云数据所在空间中获取一辅助平面;
32、获取地面点云数据中每一数据点到辅助平面的距离以及数据点法向量与所述辅助平面的夹角;
33、利用数据点到辅助平面的距离以及所述夹角获取地面点云数据中的最大平面区域。
34、较佳地,所述利用数据点到辅助平面的距离以及所述夹角获取地面点云数据中的最大平面区域,包括:
35、对于目标数量的数据点,获取当前目标数量下的数量最多的夹角数值;
36、按照数量最多的夹角数值调整辅助平面的空间角度,使辅助平面与数量最多的夹角数值对应法向量垂直;
37、获取当前目标数量下的数量最多的距离数值,将数量最多的距离数值对应的数据点所在平面作为地面点云数据中的最大平面区域,所述距离数值为数据点到辅助平面的距离值。
38、本发明还提供一种基于激光雷达建模的地面平整度获取系统,其特点在于,所述地面平整度获取系统包括一激光雷达、一ar相机装置以及一处理模块,所述地面平整度获取系统用于实现如上所述的地面平整度获取方法。
39、本发明还提供一种ar相机装置,其特点在于,所述ar相机装置用于如上所述的基于激光雷达建模的地面平整度获取系统。
40、符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
41、本发明的积极进步效果在于:
42、本发明提供一种地面水平度和平整度的测量方式,并结合ar装置进行显示,提高地面整改效率。
技术特征:1.一种基于激光雷达建模的地面平整度获取方法,其特征在于,所述地面平整度获取方法包括:
2.如权利要求1所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述获取地面点云数据中每一取样点到最大平面区域的距离,包括:
3.如权利要求1所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述输出样式为颜色,所述在显示终端上按照所述输出样式输出所述影像,包括:
4.如权利要求3所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述地面平整度获取方法包括:
5.如权利要求3所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述目标地面上设有标靶,所述将地面点云数据和显示终端的画面坐标匹配,包括:
6.如权利要求3所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述将地面点云数据和显示终端的画面坐标匹配,包括:
7.如权利要求1所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述获取地面点云数据中的最大平面区域,包括:
8.如权利要求7所述的基于激光雷达建模的地面平整度获取方法,其特征在于,所述利用数据点到辅助平面的距离以及所述夹角获取地面点云数据中的最大平面区域,包括:
9.一种基于激光雷达建模的地面平整度获取系统,其特征在于,所述地面平整度获取系统包括一激光雷达、一ar相机装置以及一处理模块,所述地面平整度获取系统用于实现如权利要求1至8中任意一项所述的地面平整度获取方法。
10.一种ar相机装置,其特征在于,所述ar相机装置用于如权利要求9所述的基于激光雷达建模的地面平整度获取系统。
技术总结本发明公开了一种基于激光雷达建模的地坪平整度获取方法及系统,所述地面平整度获取方法包括:获取目标地面的地面点云数据;获取地面点云数据中的最大平面区域;获取地面点云数据中每一取样点到最大平面区域的距离;建立一虚拟相机位,从虚拟相机位获取地面点云数据的影像;按照所述距离调整所述影像中取样点的输出样式;在显示终端上按照所述输出样式输出所述影像。本发明提供一种地面水平度和平整度的测量方式,并结合AR装置进行显示,提高地面整改效率。技术研发人员:朱子耕,孟煜,王佳琪受保护的技术使用者:盎锐(杭州)信息科技有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323946.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。