一种基于大模型自优化的船舶防碰撞监测方法及系统与流程
- 国知局
- 2024-11-19 09:44:22
本发明涉及船舶防碰撞监测,更为具体的,涉及一种基于大模型自优化的船舶防碰撞监测方法及系统。
背景技术:
1、随着全球贸易和经济活动的增长,世界船舶的数量在不断增加。然而,船舶数量的增加也加剧了海上事故的风险,使得加强船舶安全监管和提高避碰技术的重要性日益凸显。船舶防碰撞算法是确保海上交通安全的关键技术之一,能够帮助船员或自动驾驶系统及时识别潜在的碰撞风险,从而采取适当的避碰措施。目前防碰撞算法主要基于规则的避碰和自动避碰,基于规则的避碰是通过判断船舶间的相对位置、速度和航向等参数,来制定合理的避让策略。自动避碰是利用ais和雷达等设备收集的数据来评估碰撞危险度,并根据这个评估来指导船舶驾驶员采取避碰措施。尽管现有的船舶防碰撞方案在提高海上交通安全方面起到了积极作用,但仍需改进以提高其精度和实时性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于大模型自优化的船舶防碰撞监测方法及系统,通过自监督预训练的船舶位置信息预测大模型,并通过将预测输出船舶未来位置计算距离来实现避碰,进一步通过实际数据自优化预测模型,提高了精度和实时性,解决了现有船舶防碰撞技术的精准性和人力成本问题。
2、本发明的目的是通过以下方案实现的:
3、一种基于大模型自优化的船舶防碰撞监测方法,包括以下步骤:
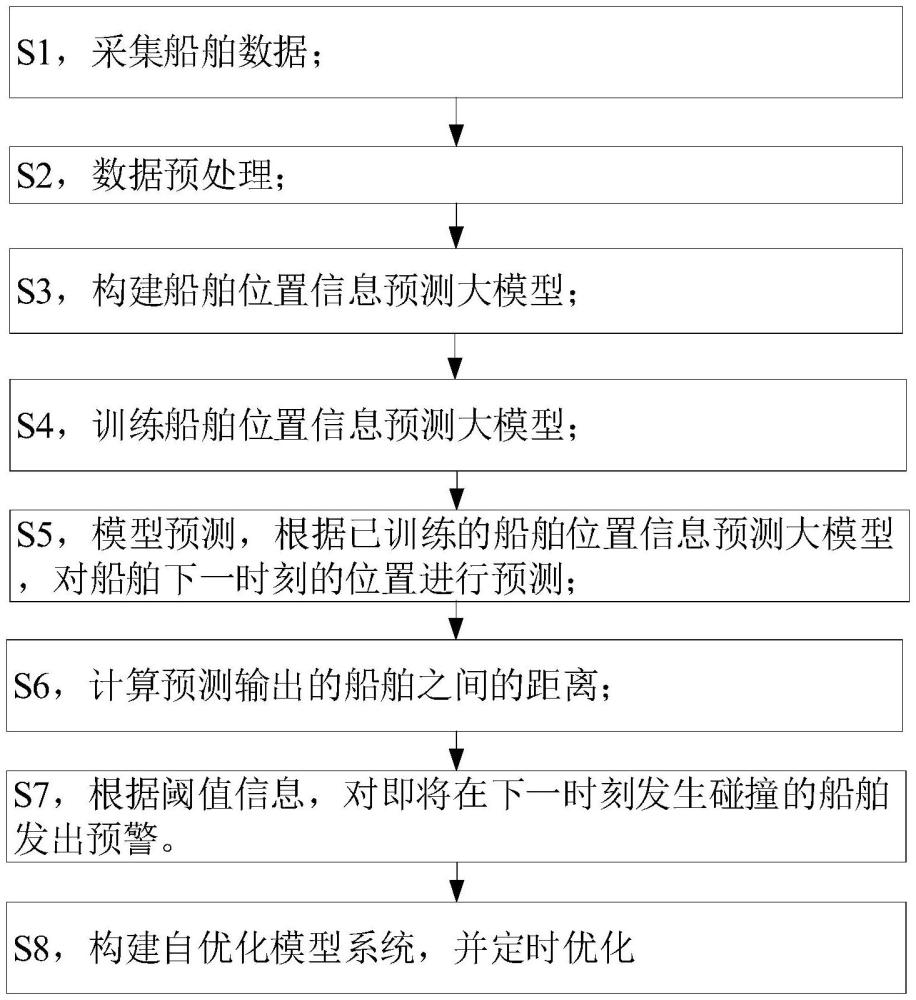
4、s1,采集船舶数据;
5、s2,数据预处理;
6、s3,构建船舶位置信息预测大模型;
7、s4,训练船舶位置信息预测大模型;
8、s5,模型预测,根据已训练的船舶位置信息预测大模型,对船舶下一时刻的位置进行预测;
9、s6,计算预测输出的船舶之间的距离;
10、s7,根据阈值信息,对即将在下一时刻发生碰撞的船舶发出预警。
11、进一步地,在步骤s7之后,还包括:
12、步骤s8,构建自优化模型系统,并定时优化。
13、进一步地,在步骤s1中,所述采集船舶数据具体包括采集船舶自动识别系统ais历史数据,且在在数据采集过程中采用自适应采样率方法,根据船舶的实际动态和周围环境调整数据发送频率。
14、进一步地,在步骤s2中,所述数据预处理具体包括异常数据处理和插值处理。
15、进一步地,在步骤s3中,所述构建船舶位置信息预测大模型,包括:基于decoder大模型构建船舶位置信息预测大模型,具体为包含输入模块、解码模块、输出模块;
16、输入模块为船舶位置信息的时间序列数据{x1,x2,x3,…,xt},xt表示t时刻某一条船舶的位置信息构成的向量,xt=[经度,纬度,对地航向,对地航速,航首向,转向率,航向状态];将船舶的位置信息构成的向量作为decoder模块输入;
17、解码模块包含六个decoder block,上一个block的输出是下一个block的输入,每个block包含一个masked self-attention单元和fnn单元,masked self-attention单元用于接收来自输入模块的数据,fnn单元用于接收masked self-attention单元的输出;
18、在输出模块中,其内容和输入模块保持一致,时间上前向一步。
19、进一步地,在步骤s4中,所述训练船舶位置信息预测大模型,具体包括子步骤:
20、首先,将预处理的数据按船舶的mmsi码进行分组,并且通过设置滑窗将单个船舶的轨迹分成片段;
21、然后,构造损失函数,用于计算训练样本产生的损失以进行梯度更新;
22、最后,设置训练超参,输入轨迹片段进行训练,直到损失函数值趋于平稳停止训练。
23、进一步地,在步骤s5中,所述根据已训练的船舶位置信息预测大模型,对船舶下一时刻的位置进行预测,具体包括:根据已训练的船舶位置信息预测大模型,将待预测船舶的轨迹片断输入模型,用于对船舶下一时刻的位置进行预测并保存。
24、进一步地,在步骤s6中,所述计算预测输出的船舶之间的距离,具体包括:对步骤s5中保存的船舶下一时刻的位置信息,只获取其中的经纬度并计算两两船舶之间的距离,该距离的计算方式包括通过哈弗辛公式实现。
25、进一步地,在步骤s8中,所述构建自优化模型系统,并定时优化,具体包括:构建自优化模型系统,首先接收船舶自动识别系统ais实时数据并存在数据缓存区;然后初始化lora层并进行微调;随后分别输出llm模型和微调lora层的损失loss1和损失loss2;最后对比两个损失的大小,如果loss2小于loss1,说明微调后的模型精度更高,则输出梯度δw,并将梯度更新llm模型,如果loss2大于loss1,说明原始llm模型的精度更高,则重新初始化lora层,等待下一次微调;其中,llm模型为步骤s3中构建的船舶位置信息预测大模型。
26、一种基于大模型自优化的船舶防碰撞监测系统,包括:
27、数据采集模块,用于采集船舶数据;
28、预处理模块,用于数据预处理;
29、预测模型构建模块,用于构建船舶位置信息预测大模型;
30、训练模块,用于训练船舶位置信息预测大模型;
31、预测模块,用于模型预测,并根据已训练的船舶位置信息预测大模型,对船舶下一时刻的位置进行预测;
32、距离计算模块,用于计算预测输出的船舶之间的距离;
33、预警模块,用于根据阈值信息,对即将在下一时刻发生碰撞的船舶发出预警;且该系统用于执行如上任一项所述的基于大模型自优化的船舶防碰撞监测方法。
34、本发明的有益效果包括:
35、(1)本发明方法巧妙地运用大模型技术来提炼船舶航行的丰富信息,并且能够学习到更多的特征和模式进行实现船舶位置的预测。与传统模型直接预测相比,此方法在船舶位置预测方面显著提高了预测的准确度和细致度。
36、(2)在船舶位置预测中,本发明方法中模型不仅融入了船舶的经纬度,并且纳入了船舶的对地航向、速度等信息,从多个维度实现了防碰撞预警,有助于提高位置预测的精度。
37、(3)随着船舶航行轨迹的增加,本发明方法中自优化模型系统能够根据新的位置定期对模型进行更新,以此优化船舶位置的预测模型,从而提升模型的泛化性。
38、(4)应用本发明的防碰撞方案采用了先进的大模型技术,并且实现了模型的自由化,提供了更为准确的避碰辅助决策,减轻了驾驶员的工作强度,并提高了决策的准确性。并且有效促进了航海自动化技术的发展,也为其他相关领域提供了技术创新的借鉴和应用平台。
39、(5)本发明方案不仅可以优化船舶的航线规划,减少不必要的停泊和绕行,从而节约时间和燃油成本,提高整体航行效率。这对于全球贸易尤为重要,因为海上运输是全球供应链的关键环节。同时,防止船舶碰撞不仅是为了保护人员和货物,还有助于防止因碰撞造成的油污和其他有害物质泄漏,这对于保护海洋环境至关重要。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330007.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表