基于数字孪生的船舶安全航行可视化方法及系统与流程
- 国知局
- 2024-12-26 15:02:03
本技术属于船舶航行仿真,具体涉及一种基于数字孪生的船舶安全航行可视化方法及系统。
背景技术:
1、近年来,我国的船舶行业不断发展,在真实的船舶运行环境中,存在许多复杂且难以预料的工况,及时了解船舶航行环境是保障船舶安全航行作业的基础。同时船体本身的结构相对复杂,并且体积相对庞大,对其进行精准检测相对较难,尤其是海航的船舶,更因海况等的多变性及变化随机性等因素,对其进行实时精准的检测将更加困难。
技术实现思路
1、基于上述问题,本技术通过构建模拟海洋环境模型,通过数字孪生的虚拟环境,船舶可以模拟不同的航行路线,分析风浪、洋流、气象等多重因素对航行的影响,提高航行安全性和效率。其技术方案为:
2、一种基于数字孪生的船舶安全航行可视化方法,包括以下步骤:
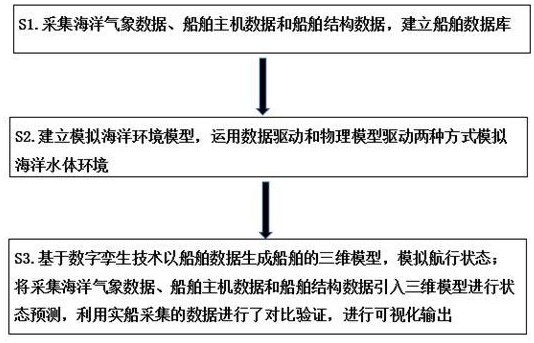
3、s1.采集海洋气象数据、船舶主机数据和船舶结构数据,建立船舶数据库;
4、s2.建立模拟海洋环境模型,运用数据驱动和物理模型驱动两种方式模拟海洋水体环境;
5、s3.基于数字孪生技术以船舶数据生成船舶的三维模型,模拟航行状态;将采集海洋气象数据、船舶主机数据和船舶结构数据引入三维模型进行状态预测,利用实船采集的数据进行了对比验证,进行可视化输出。
6、优选的,步骤s1中,采用气象传感器和波浪传感器采集海洋环境中的风向、海流、海浪信息,同时通过船舶主机传感器、摄像头和应力应变传感器形成船舶主体数据,并对将数据传输到数据处理服务器中,形成船舶主体和海洋环境数据库。
7、优选的,建立模拟海洋环境模型,步骤如下:
8、s21.船舶的运动学模型基于模块化概念和时域统一模型理论构建,公式如下:
9、;
10、式中:表示船体受的总力,、、分别代表船体、螺旋桨、舵产生的作用力;、、、分别代表风、海流、一阶波浪、二阶波浪引起的环境干扰力;船体力中包含由附加质量矩阵a、阻尼系数矩阵b和脉冲响应函数矩阵计算的船体辐射力、静水恢复力矩阵以及黏性水动力系数计算的非线性黏性力;为时间,为变化的时间常数,为时间常数,表示偏态系数;
11、s22.基于回归方法构建水动力系数数据库,在时域仿真中利用数据库插值计算不同运动状态下的船舶水动力系数;
12、s23.通过数值求解海洋环境矢量场来重现真实海洋信息,公式如下:
13、 ;
14、式中:n为波作用密度谱;是二维哈密顿算子;是波群速度;为流速;和为波数和波向; s是方向的一个坐标;是垂直于s方向的坐标;是波谱的源项,通过线性输入项、风输入项、非线性波浪相互作用项,耗散项和海底摩擦项组合而成;
15、s24.建立实海域数据库和水动力数据库,以用于真实海洋环境重现和船舶运动状态预测。
16、优选的,步骤s22中,船舶在航行中所受的环境作用主要来自于风、海流和海浪,分别对应上式中的、、、,其中海浪有船舶在航行中受到的风力作用可用风载荷系数进行计算,表达式如下:
17、;
18、式中为空气密度;为是视风速度;、分别为x、y方向的风载荷系数,为任一方向的风载荷系数、为单位面积所受的风载荷系数;为船舶侧向投影面积;从船舶前向投影面积;为船舶全长;由于海流对船体的黏性非线性力已在船体力中予以计算,因此船舶受到海流的干扰简化为随着海流的平移运动,如下:
19、 ;
20、式中和表示原始海流的速率分量;为原始海流的速率;为原始流向;为船舶艏向;和为经过矢量匀算后的相对船速,为横向海流速率、分别为纵向海流速率。
21、优选的,波浪激励力的计算根据一阶波浪载荷响应因子和波浪谱进行计算,可得:
22、;
23、式中表示6个自由度;为不同自由度下对应的一阶波浪载荷系数;为船速,为波浪离散频率;为波浪遭遇角;为波高并利用波浪谱、波浪离散频率和波浪扩散角计算;为不规则波浪中的随机相位;为波浪载荷系数的相位值并通过波浪载荷系数的实部和虚部进行计算,为波浪离散频率增量,为扩散角增量。
24、优选的,二阶波浪对船舶运动产生缓慢的漂移作用,波浪漂移力利用二阶波浪载荷系数和波浪谱根据下式进行计算:
25、;
26、 ;
27、式中:为平均二阶波浪载荷系数;为x轴方向的平均船速、 为y轴方向的平均船速、为任一方向的平均船速、为离散波浪频率和波浪遭遇角对应的频域二阶载荷系数;是有义波高;为海水密度;为重力加速度;为船舶垂线间长。
28、优选的,步骤s3中,构建数字孪生模型:
29、 ;
30、 ps为物理船舶参数;
31、 vs为虚拟船舶参数;
32、 ss为数据仿真:将采集物理船舶参数,对虚拟船舶进行仿真,输出物理船舶和虚拟船舶数据至前端;并将仿真结果发送至历史数据库 dd;
33、 dd为历史数据库:为仿真提供数据源;
34、 fd为前端展示:对物理船舶和虚拟船舶航向动态实时展示;
35、 cn为数据交互。
36、优选的,数据交互关系 cn表达式如下:
37、;
38、通过数据采集方式实时采集 ps数据,并将数据传输至vs对应模型;
39、通过标准软件接口实现 ps与 ss的双向通信,数据采集、传输、存储;
40、利用多种传感器、数据采集设备、标准/非标准通信协议实时采集 ps数据,并传输至 dd;
41、通过标准软件接口实现 vs与 ss的双向通信,实现基于实时数据的模型驱动;
42、通过网络通信技术实现 vs与 fd的实时同步和动态交互;
43、通过标准数据库接口将实时数据存储到 dd中,同时 ss通过对 dd中历史数据的统计分析和常用算法、数学模型的调用支持 ss的运行;
44、通过 tcp/ip、udp等网络通信技术在 ss的支持下实现 fd与 dd之间的数据交互;
45、通过接口技术、网络通信技术、前端开发技术实现 fd与 ss间的数据交互, ss为 fd提供界面集成服务、数据交互服务,并定义 fd人机交互响应决策规则。
46、一种基于数字孪生的船舶安全航行可视化系统,包括数据采集模块、数据处理模块和数据可视化模块;
47、所述数据采集模块:利用传感器获取物理船舶的相关参数数据;构建历史数据库;
48、所述数据处理模块:利用历史数据库,对虚拟船舶进行仿真,输出物理船舶和虚拟船舶数据至前端;
49、数据可视化模块:物理船舶和虚拟船舶可视化输出。
50、优选的,所述数据可视化模块:将船舶航行路线及海洋水体环境同步展示,能直观准确展示船舶的经纬度、艏向、姿态以及航速、水温、水深、风速、风向等数据信息,以及船体本身随不同海况所呈现出的不同幅度的摇摆状况,并通过建立的海洋环境模型进一步模拟船舶航行姿态,进行辅助决策。
51、与现有技术相比,本技术有益效果如下:
52、1)运用数据驱动和物理模型驱动两种方式模拟海洋水体环境,最大化的模拟海洋多变的环境,更接近现实状况,为仿真提供精确的环境模型。
53、2)通过数字孪生的虚拟环境,船舶可以模拟不同的航行路线,分析风浪、洋流、气象等多重因素对航行的影响,提高航行安全性和效率。
54、3)通过数字孪生模型可以通过传感器和物联网将船舶的各类实时数据与虚拟模型进行同步。
本文地址:https://www.jishuxx.com/zhuanli/20241226/344245.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。