本实用新型涉及飞机地面牵引防撞系统领域,具体为一种基于爬行机器人技术的飞机地面牵引防撞系统。
背景技术:
目前,由于牵引车驾驶员拖飞机时的视野范围有限,民用飞机在地面滑行阶段不时发生与其他飞机或停机坪上车辆、机库墙壁等其他障碍物擦碰事件,每次擦碰事件都会造成航空公司的飞机停飞待修及影响航班调配等重大损失,而现有技术中视觉检测系统只可以观察飞机的形状轮廓,机翼与障碍物的距离不能识别,飞机表面有很多传感器,多足机器人的机械爬行足可能对其造成损伤,吸盘式机器人行进速度过慢,且不适合飞机这种曲面爬行,多用于类似玻璃的光滑垂直面,设置在机场滑行道和牵引车车顶的飞机地面防撞系统,仍存在一定的视觉盲区,存在安全隐患,牵引车驾驶员只能通过声音和图像的形式获得周围目标的危险估计,但人的反应速度存在不稳定性,如果不能及时停止,仍会造成飞机机翼的擦碰,牵引车拖动飞机时,飞机上的机务人员通过300mhz对讲机与牵引车驾驶员沟通,由于牵引车自身及周围声音的干扰,存在听不清楚或听错行进方向的问题,错误的行进路线可能会将拖动的飞机拖到其他飞机的位置发生擦碰,为此,我们提出了一种基于爬行机器人技术的飞机地面牵引防撞系统。
技术实现要素:
本实用新型要解决的技术问题是克服现有的缺陷,提供一种基于爬行机器人技术的飞机地面牵引防撞系统,可以有效解决背景技术中的问题。
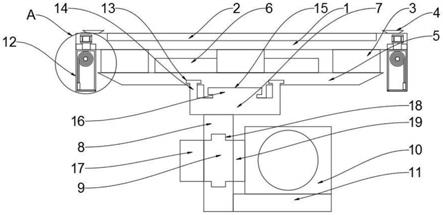
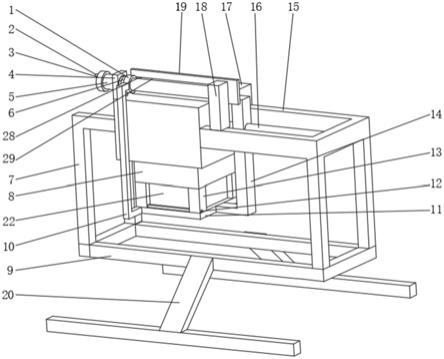
为实现上述目的,本实用新型提供如下技术方案:一种基于爬行机器人技术的飞机地面牵引防撞系统,包括机体,所述机体的中部设置有伸缩杆,所述伸缩杆的上端外表面设置有激光雷达,所述激光雷达的上端外表面设置有全景摄像头,所述机体的前端设置有陀螺仪,所述机体的两侧均设置有滚轮,所述滚轮的外表面设置有履带,所述伸缩杆的下端设置有伸缩吸盘。
优选的,所述陀螺仪与滚轮之间设置有滚轮轴与内环轴,所述滚轮轴的一端与内环轴的一端固定连接,所述陀螺仪的中部设置有转子,所述陀螺仪的四周设置有内环。
优选的,所述机体的内部固定安装有电源模块、电机、齿轮箱、电控机械式自动变速器、控制模块与真空泵,所述电机位于电源模块的前端,所述控制模块位于电源模块的一侧,所述电控机械式自动变速器位于控制模块的前端,所述齿轮箱位于电控机械式自动变速器的前端,所述真空泵位于控制模块的一侧。
优选的,所述陀螺仪通过滚轮轴和内环轴与滚轮活动连接。
优选的,所述电机、控制模块与真空泵均与电源模块电性连接。
与现有技术相比,本实用新型的有益效果是:
本实用新型通过设置的履带、全景摄像头、激光雷达、陀螺仪、伸缩吸盘、电控机械式自动变速器与控制模块,实现爬行机器人在飞机顶部表面自由移动,配合全景摄像头及激光雷达,可以为牵引车驾驶员提供机翼部分无死角的实时图像和与障碍物之间的距离信息,图像和距离信息也是爬行机器人规划行进路线的来源,无动力履带行进机构有更好的防滑性能,行进轨迹简单可控,降低损伤飞机表面传感器的几率,行进速度比吸盘式要快,爬行效率更高,当即将发生擦碰事故时,制动模块能够以更快的反应速度进行制动,降低事故发生率,显示终端不仅有语音交流功能,还可以通过导航图形界面辅助驾驶,具有一定的有利影响。
附图说明
图1为本实用新型中爬行机器人结构示意图;
图2为本实用新型中爬行机器人结构正视图;
图3为本实用新型中爬行机器人结构俯视图;
图4为本实用新型中爬行机器人结构右视图;
图5为本实用新型中机体结构示意图;
图6为本实用新型中控制系统结构图;
图7为本实用新型中吸盘模块控制流程图;
图8为本实用新型中摄像头模块控制流程图;
图9为本实用新型中激光雷达模块控制流程图;
图10为本实用新型中陀螺仪模块控制流程图;
图11为本实用新型中制动模块原理图;
图12为本实用新型中制动模块程序流程图。
图中:1、机体;2、履带;3、全景摄像头;4、内环轴;5、内环;6、转子;7、电机转轴;8、滚轮轴;9、激光雷达;10、陀螺仪;11、滚轮;12、伸缩吸盘;13、电源模块;14、伸缩杆;15、电机;16、转子电机;17、齿轮箱;18、电控机械式自动变速器;19、控制模块;20、真空泵。
具体实施方式
为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例1
一种基于爬行机器人技术的飞机地面牵引防撞系统可以使机器人在飞机上自由爬行,其拥有的360°全景摄像头3获得无死角的视觉效果,360°激光雷达9可以时刻反馈机翼与障碍物的间距,橡胶履带2保证爬行机器人在行进过程中有良好的防滑性能,两个陀螺仪10分别控制爬行机器人的上下方位和左右方位,同时也是动力来源,底部伸缩吸盘12可以帮助爬行机器人到达指定位置后进行吸附固定,爬行机器人装置如图1,图2,图3,图4所示;
将激光雷达9的测距信息和机器视觉判断出的机翼图像提供给控制模块19,当即将发生碰撞时,由控制模块19启动紧急制动模块和报警模块,及时停止飞机的行进,避免擦碰事件的发生;
牵引车拖动飞机时,飞机上会有机务人员为牵引车驾驶员提供行进路线,可使用机上终端(例如平板)为机下终端(例如平板)发送行进路线,两个终端内置机场路线图,同时可实现语音交流,机下终端显示屏幕分为三个竖屏画面,中间为机上终端提供的导航路线图,两侧分别为左右机翼的实时画面和激光雷达9测量的机翼周围物体的相对距离;
机器人内部结构由供电部分、控制部分和执行机构组成:
供电部分:电机7、控制模块19由电源模块13供电,转子电机16由控制器主板供电;
控制部分:控制模块19通过信号线直接控制转子电机16、真空泵20、电控机械式自动变速器18和电机15;
执行机构:电控机械式自动变速器18接收自控制模块19的信号,直接控制齿轮箱17内齿轮,通过调节各齿轮的分合来控制伸缩杆14、内环5的启停,调节齿数比来控制各输出轴转速;
机体结构示意图如图5所示,控制系统结构图如图6所示;
伸缩杆14位于车体的几何中心,可上下伸缩,其内部中空,可放置360°激光雷达9和全景摄像头3的超六类网线;
激光雷达9与伸缩杆14相连,全景摄像头3固定在360°激光雷达9上面;
两个陀螺仪10安装在机体1的前后凹槽处,由内环轴4控制内环5翻转,滚轮11和履带2属于无动力装置;
吸盘模块在机体1底部,连接伸缩杆14,主要由真空泵20和伸缩吸盘12构成,机器人在到达指定位置后控制模块19发出信号控制电控机械式自动变速器18内齿轮啮合,伸缩杆14动作,由控制器直接控制真空泵20动作,使伸缩吸盘12内形成负压,将机器人固定在指定位置,程序流程图如图7所示;
摄像头模块:采用能够夜视的全景摄像头3连接到伸缩杆14上,摄像头通过poe以太网和控制模块19相连实现数据传输和供电,高清摄像头将采集到的全景图像传输至控制模块19,控制模块19自动分析得出机器人的最佳行进路线,当机器人到达指定位置后,持续采集机翼图像传回机下终端,程序流程图如图8所示;
雷达模块:将360°激光雷达9和全景摄像头3连接到同一伸缩杆14上,雷达通过poe以太网和控制模块相连实现数据传输和供电,当机器人到达指定位置后,激光雷达9将采集的到的点云数据传回控制模块19,控制模块19处理后生成飞机周边的3d模型,并计算飞机与周边物体的距离是否安全,程序流程图如图9所示;
电源模块:采用锂电池模组给控制模块19和电机15供电;
控制模块19:包括控制器、大容量存储器和i/o接口;
控制器:采用nvidiajetsonxaviernx模组,能够并行运行现代神经网络并处理来自多个高分辨率传感器的数据;
大容量存储器:采用大容量的microsd卡,用来存储传感器采集到的数据;
i/o接口:集成了连接控制器和摄像头模块、雷达模块、电源模块13、陀螺仪模块、wifi模块、吸盘模块的所有接口,进行供电和数据传输;
陀螺仪模块:采用机械式陀螺仪10,由电机15通过电控机械式自动变速器18控制的齿轮箱17提供动力,利用陀螺仪10的进动性使机器人克服重力沿飞机表面爬行,通过控制内环5转动角度实现机器人的前进、后退和转向;
wifi模块:采用esp8266模块,通过串口集成在控制模块19上,程序流程图如图10所示;
显示终端:采用可视化手持终端,接收控制模块19通过wifi发送的各项数据;
制动模块:当控制器发出报警信号时,继电器动作使电磁铁通电吸合,代替人为制动的踏板力使液压油泵里的刹车油推动制动钳收缩进行刹车;制动模块的原理及程序控制如图11和图12所示;
报警模块:当控制器发出报警信号时,显示终端会以声音和图像的形式提醒驾驶员;
遥控装置:采用机下终端远程控制机器人,使其在飞机表面自由爬行,通过wifi传输数据;
履带模块:由滚轮11和柔性履带2构成,动力由机械式陀螺仪10提供,带动滚轮11和履带2在飞机表面上移动。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。