技术特征:
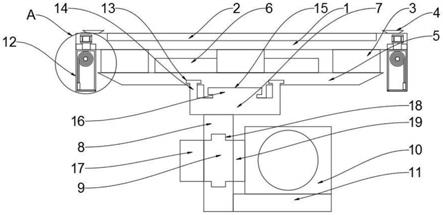
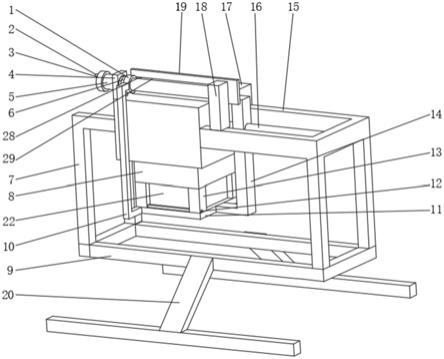
1.一种基于爬行机器人技术的飞机地面牵引防撞系统,包括机体(1),其特征在于:所述机体(1)的中部设置有伸缩杆(14),所述伸缩杆(14)的上端外表面设置有激光雷达(9),所述激光雷达(9)的上端外表面设置有全景摄像头(3),所述机体(1)的前端设置有陀螺仪(10),所述机体(1)的两侧均设置有滚轮(11),所述滚轮(11)的外表面设置有履带(2),所述伸缩杆(14)的下端设置有伸缩吸盘(12)。
2.根据权利要求1所述的一种基于爬行机器人技术的飞机地面牵引防撞系统,其特征在于:所述陀螺仪(10)与滚轮(11)之间设置有滚轮轴(8)与内环轴(4),所述滚轮轴(8)的一端与内环轴(4)的一端固定连接,所述陀螺仪(10)的中部设置有转子(6),所述陀螺仪(10)的四周设置有内环(5)。
3.根据权利要求1所述的一种基于爬行机器人技术的飞机地面牵引防撞系统,其特征在于:所述机体(1)的内部固定安装有电源模块(13)、电机(15)、齿轮箱(17)、电控机械式自动变速器(18)、控制模块(19)与真空泵(20),所述电机(15)位于电源模块(13)的前端,所述控制模块(19)位于电源模块(13)的一侧,所述电控机械式自动变速器(18)位于控制模块(19)的前端,所述齿轮箱(17)位于电控机械式自动变速器(18)的前端,所述真空泵(20)位于控制模块(19)的一侧。
4.根据权利要求2所述的一种基于爬行机器人技术的飞机地面牵引防撞系统,其特征在于:所述陀螺仪(10)通过滚轮轴(8)和内环轴(4)与滚轮(11)活动连接。
5.根据权利要求3所述的一种基于爬行机器人技术的飞机地面牵引防撞系统,其特征在于:所述电机(15)、控制模块(19)与真空泵(20)均与电源模块(13)电性连接。
技术总结
本实用新型公开了一种基于爬行机器人技术的飞机地面牵引防撞系统。本实用新型通过设置的履带、全景摄像头、激光雷达、陀螺仪、伸缩吸盘、电控机械式自动变速器与控制模块,实现爬行机器人在飞机顶部表面自由移动,配合全景摄像头及激光雷达,可以为牵引车驾驶员提供机翼部分无死角的实时图像和与障碍物之间的距离信息,图像和距离信息也是爬行机器人规划行进路线的来源,无动力履带行进机构有更好的防滑性能,行进轨迹简单可控,降低损伤飞机表面传感器的几率,行进速度比吸盘式要快,爬行效率更高,当即将发生擦碰事故时,制动模块能够以更快的反应速度进行制动,降低事故发生率,具备一定的使用前景。
技术研发人员:林育钿;关山度;张东超;郭长胜;廖慧林
受保护的技术使用者:广州白云空港设备技术发展有限公司
技术研发日:2020.07.19
技术公布日:2021.07.30
本文用于企业家、创业者技术爱好者查询,结果仅供参考。