1.本发明涉及无人机技术领域,尤其涉及一种无人机停机系统及其方法。
背景技术:
2.无人机,是利用无线电遥控设备和自备的程序控制装置操作的不载人飞机,因具有成本低、风险低、生存能力强、机动性能好等优点,无人机被广泛应用于航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域。无人机通常由搭载在其上的电池进行供电,受限于可搭载电池的重量,无人机的单次航程较短,为了延长无人机的续航能力,现有的供无人机降落的无人机机场能对无人机进行充电。
3.现有技术中,无人机的起落架由金属制作,与无人机的电池电性连接,在无人机降落在停机坪后,无人机的起落架与停机坪上的“井”字型活动支架的金属部分抵接,“井”字型活动支架的金属部分与电源电性连接,从而实现对无人机的电池进行充电。
4.现有技术中,由于“井”字型活动支架的金属部分与无人机的起落架之间的连接并不牢靠,传输效率低,且存在漏电、起火等安全隐患。
技术实现要素:
5.本发明的目的在于提供一种无人机停机系统及其方法,以解决现有技术中无人机电池充电传输效率低,且存在漏电、起火等安全隐患的问题。
6.本发明解决其技术问题是采用以下的技术方案来实现的。
7.一种无人机停机系统,包括无人机、停机坪、充电模块和对准模块,无人机适于停放于停机坪,无人机包括机体和设置于机体内的电池,停机坪包括电源,充电模块包括移动式充电头和充电接口,移动式充电头包括移动臂和设置于移动臂端部的充电接头,移动臂适于带动充电接头移动,充电接头适于与充电接口插接,对准模块用于探测移动式充电头和充电接口之间的相对位置,机体设置有移动式充电头,充电接头与电池电性连接,停机坪设置有充电接口,充电接口与电源电性连接,或者
8.停机坪设置有移动式充电头,充电接头与电源电性连接,机体设置有充电接口,充电接口与电池电性连接。
9.较佳地,停机坪包括平台,无人机适于停放于平台,停机坪设置有移动式充电头,机体设置有充电接口,充电接口设置于机体正下方,移动式充电头设置于平台上,对准模块包括摄像头和二维码,摄像头设置于平台,二维码设置于机体正下方,摄像头适于拍摄二维码。
10.较佳地,停机坪包括平台,无人机适于停放于平台,停机坪设置有充电接口,机体设置有移动式充电头,移动式充电头设置于机体正下方,充电接口设置于平台上于,对准模块包括摄像头和二维码,摄像头设置于机体正下方,二维码设置于平台,摄像头适于拍摄二维码。
11.较佳地,充电接口设置于平台中央处。
12.较佳地,移动臂为机械臂,充电接头通过设置于机械臂内的导线与电源或者电池电性连接。
13.较佳地,移动臂包括步进电机和推杆,推杆设置于步进电机上,充电接头设置于推杆远离步进电机的一端,步进电机适于推动推杆进行直线运动,充电接头为圆形电源接头,充电接口为圆形电源接口。
14.本发明还提供一种无人机停机方法,用于控制无人机停放于停机坪,包括:
15.计算无人机的拟悬停位置;
16.控制无人机悬停于拟悬停位置;
17.控制无人机降落于停机坪的平台上;
18.探测设置于无人机的机身上的移动式充电头与设置于停机坪的充电接口之间的相对位置;
19.控制移动式充电头插接于充电接口。
20.较佳地,探测无人机的移动式充电头和停机坪的充电接口之间的相对位置包括:
21.控制无人机的摄像头拍摄停机坪的平台上设置的二维码,获取二维码图片;
22.分析二维码图片,从而计算出移动式充电头和充电接口之间的相对位置。
23.本发明还提供另一种无人机停机方法,用于控制无人机停放于停机坪,包括:
24.计算无人机的拟悬停位置;
25.控制无人机悬停于拟悬停位置;
26.控制无人机降落于停机坪的平台上;
27.探测设置于停机坪的平台上的移动式充电头和设置于无人机的机身上的充电接口之间的相对位置;
28.控制移动式充电头插接于充电接口。
29.较佳地,探测停机坪的移动式充电头和无人机的充电接口之间的相对位置,包括:
30.控制停机坪的摄像头拍摄无人机的正下方设置的二维码,获取二维码图片;
31.分析二维码图片,从而计算出移动式充电头和充电接口之间的相对位置。
32.本发明提供的无人机停机系统及其方法,设置有对准模块和充电模块,充电模块包括移动式充电头和充电接口,移动式充电头和充电接口分别设置于无人机和停机坪上,在对准模块的辅助下,移动式充电头可准确与充电接口插接,从而避免现有技术中容易出现的漏电、起火、充电效率低等问题。
附图说明
33.图1为本发明实施例提供的无人机停机系统的立体结构示意图。
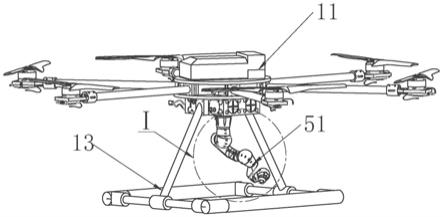
34.图2为图1中移动式充电头与无人机配合的立体机构示意图。
35.图3为图2中部分ⅰ的局部放大示意图。
36.图4为图1中停机坪的立体结构示意图。
37.图5为本发明实施例提供的无人机停机方法的流程图。
38.图6为本发明实施例提供的另一无人机停机方法的流程图。
具体实施方式
39.为更进一步阐述本发明为达成预定发明目的所采取的技术方式及功效,以下结合附图及实施例,对本发明的具体实施方式、结构、特征及其功效,详细说明如后。
40.请参图1,本发明实施例提供一种无人机停机系统,包括无人机10、停机坪30、充电模块50和对准模块(图未示),该无人机10适于停放于该停机坪30。
41.请参图2和图3,本发明较佳实施例中,该无人机10包括机体11、设置于该机体11内的电池(图未示)和第一控制器(图未示),以及设置于该机体11下部的起落架13。该电池为可充电电池,该第一控制器用于控制该无人机10。
42.请参图4,本发明较佳实施例中,该停机坪30包括箱体31、舱盖33、基座37,以及设置于箱体31上端面的平台35和设置于箱体31内部的电源(图未示)和第二控制器(图未示),舱盖33适于盖合在箱体31上,基座37用于为停机坪30提供安放的平台,无人机10适于停放于该平台35之上,具体地,无人机10的起落架13停放于该平台35上。该第二控制器用于控制该停机坪30。
43.具体地,该电源可以是接入公共电网的电源线,也可以是电池,还可以是ups(uninterruptible power supply,不间断电源)。
44.充电模块50用于对无人机10的电池进行充电。本发明较佳实施例中,该充电模块50包括包括移动式充电头51和充电接口53。
45.具体的,请再参图3,该移动式充电头51包括移动臂51a和设置于该移动臂51a端部的充电接头51b,该移动臂51a适于带动该充电接头51b移动,该充电接头51b适于与该充电接口53插接。
46.可以理解,作为本发明实施例的简单变形的技术方案,充电模块可以包括移动式充电接口和充电接头。具体地,移动式充电接口包括移动臂和设置于该移动臂端部的充电接口,该移动臂适于带动该充电接口移动,该充电接头适于与该充电接口插接。本方案亦在本发明要求的保护范围之内。
47.本发明较佳实施例中,移动臂51a可以为机械臂。
48.本发明较佳实施例中,充电接头51b通过设置于机械臂内的导线(图未示)与设置于停机坪30内的电源或者设置于无人机10的机体11内的电池电性连接。
49.本发明另一较佳实施例中,移动臂可以包括步进电机和推杆,该推杆设置于该步进电机上,该充电接头设置于该推杆远离步进电机的一端,该步进电机适于推动该推杆进行直线运动。较佳地,该充电接头为圆形电源接头,该充电接口为圆形电源接口。
50.对准模块用于探测该移动式充电头51和充电接口53之间的相对位置。本发明较佳实施例中,该对准模块包括摄像头(图未示)和二维码(图未示)。
51.本发明较佳实施例中,对准模块还可以是红外对管,包括分别设置于无人机10和停机坪30上的红外管。
52.本发明较佳实施例中,无人机10的机体11设置有该移动式充电头51,该移动式充电头51的充电接头51b与无人机10的电池电性连接。停机坪30设置有该充电接口53,该充电接口53与电源电性连接。
53.较佳地,该移动式充电头51设置于该机体11正下方,该充电接口53设置于该停机坪30的平台35上。具体的,该充电接口53设置于该平台35中央处或者靠近中央的位置。
54.本发明较佳实施例中,摄像头设置于该机体11正下方,二维码设置于无人机10的平台35,该摄像头适于拍摄该二维码。较佳地,该二维码设置于该平台35靠近中央的位置。
55.可以理解,在无人机10停放于停机坪30后,摄像头拍摄平台35上的二维码,获取二维码图片;第一控制器分析该二维码图片,从而计算出该移动式充电头51和该充电接口53之间的相对位置。在第一控制器的控制下,移动臂51a带动充电接头51b插接于充电接口53。
56.本发明另一较佳实施例中,停机坪30设置有该移动式充电头51,该充电接头51b与该电源电性连接。机体11设置有该充电接口53,该充电接口53与无人机10的电池电性连接。
57.较佳地,该充电接口53设置于该机体11正下方,该移动式充电头51设置于该停机坪30的平台35上。具体的,该移动式充电头51设置于该平台35中央处或者靠近中央的位置。
58.本发明较佳实施例中,摄像头设置于平台35,二维码设置于机体11正下方,摄像头适于拍摄二维码。较佳地,该二维码设置于该平台35靠近中央的位置。
59.可以理解,在无人机10停放于停机坪30后,摄像头拍摄无人机10的机体11正下方的二维码,获取二维码图片;第二控制器分析该二维码图片,从而计算出该移动式充电头51和该充电接口53之间的相对位置。在第二控制器的控制下,移动臂51a带动充电接头51b插接于充电接口53。
60.请参图5,本发明实施例还提供一种无人机停机方法,用于控制无人机10停放于停机坪30,包括以下步骤:
61.s11:计算该无人机10的拟悬停位置;
62.s12:控制该无人机10悬停于该拟悬停位置;
63.s13:控制该无人机10降落于该停机坪30的平台35上;
64.s14:探测设置于该无人机10的机身上的移动式充电头51与设置于该停机坪30的充电接口53之间的相对位置;
65.s15:控制该移动式充电头51插接于该充电接口53。
66.较佳的,该探测该无人机10的移动式充电头51和该停机坪30的充电接口53之间的相对位置包括:
67.控制该无人机10的摄像头拍摄该停机坪30的平台35上设置的二维码,获取二维码图片;
68.分析该二维码图片,从而计算出该移动式充电头51和该充电接口53之间的相对位置。
69.请参图6,本发明另一实施例还提供一种无人机停机方法,用于控制无人机10停放于停机坪30,包括以下步骤:
70.s21:计算该无人机10的拟悬停位置;
71.s22:控制该无人机10悬停于该拟悬停位置;
72.s23:控制该无人机10降落于该停机坪30的平台35上;
73.s24:探测设置于该停机坪30的平台35上的移动式充电头51和设置于该无人机10的机身上的充电接口53之间的相对位置;
74.s25:控制该移动式充电头51插接于该充电接口53。
75.较佳的,该探测该停机坪30的移动式充电头51和该无人机10的充电接口53之间的相对位置,包括:
76.控制该停机坪30的摄像头拍摄该无人机10的正下方设置的二维码,获取二维码图片;
77.分析该二维码图片,从而计算出该移动式充电头51和该充电接口53之间的相对位置。
78.本发明实施例提供的无人机停机系统及其方法,设置有对准模块和充电模块,充电模块包括移动式充电头和充电接口,移动式充电头和充电接口分别设置于无人机和停机坪上,在对准模块的辅助下,移动式充电头可准确与充电接口插接,从而避免现有技术中容易出现的漏电、起火、充电效率低等问题。
79.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
80.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
81.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
82.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。