1.本公开涉及控制装置、车辆和控制方法,更具体地,涉及一种用于控制包括车速传感器的车辆的控制装置、其控制方法和车辆。
背景技术:
2.一些车辆通常包括发动机停止
‑
重启系统(也称为停止
‑
启动系统或停止和启动系统)。发动机停止
‑
重启系统在车速降低至特定速度(例如,每小时0km)时停止发动机的空转,并且在制动踏板的操作被释放或加速踏板被操作时还重启发动机。这样的发动机停止
‑
重启系统可以控制燃料成本。
3.已经有包括分动器的四轮驱动车辆。分动器是用于将发动机的驱动力分配至前轮侧和后轮侧的机构。一些分动器还包括用于在适合于越野行驶的低档模式与适合于公路行驶的高档模式之间切换减速比的机构。切换至低档模式提高了越野行驶性能。
4.在包括这样的发动机停止
‑
重启系统和分动器的车辆中,当车辆在越野路上行驶且分动器被切换至低档模式时,当由于车速变得低于规定速度导致发动机停止
‑
重启系统使发动机停止时,可能产生各种有害影响。有害影响的示例如下。由于驱动力没有传递至车轮,因此,车辆的移动变得不稳定。发动机制动器往往变得不那么有效。在包括使用发动机的负压的制动器的车辆的情况下,制动操作需要更大的力。此外,在包括使用发动机的输出的动力转向系统的车辆的情况下,转向操作需要更大的力。
5.为了防止驾驶员受到有害影响的干扰,当分动器被切换至低档模式时,一些车辆禁止发动机停止
‑
重启系统的操作(例如,参见pct申请第2014
‑
526636号的公开日文翻译)。
技术实现要素:
6.然而,在jp
‑
a
‑
2014
‑
526636中公开的车辆中,当分动器被切换至低档模式时,即使车辆在公路上而不是在越野路上行驶,发动机停止
‑
重启系统的操作也会被禁止,因此,无法控制燃料成本。因此,即使分动器被切换至低档模式时,也需要判定车辆是否真的处于不可避免的低速行驶(诸如越野行驶)的情况。
7.还存在的问题是,通过使用照相机和昂贵的传感器等来测量车辆的行为以区分越野路和公路可能导致成本增加。
8.为了解决这些问题而做出本公开,并且本公开的目的在于提供一种车辆控制装置、控制方法和车辆,其能够判定不可避免低速行驶的情况,同时抑制成本增加。
9.根据本公开的控制装置控制包括车速传感器的车辆。控制装置被配置为:使用由车速传感器检测的车速来识别车辆从启动至停止的区间;判定低速区间的次数是否大于规定次数,该低速区间是车速的代表值小于规定速度的所识别区间;以及当判定低速区间的次数大于规定次数时,判定车辆处于不可避免低速行驶的特定情况。
10.根据这样的配置,通过简单地使用由车速传感器检测的车速,在低速行驶区间持续的情况下,即低速区间的次数大于规定次数,该低速区间是车辆从启动至停止的区间,其
中代表值速度小于规定速度,可以判定车辆处于不可避免低速行驶的情况。由此,可以提供一种车辆控制装置,其能够判定不可避免低速行驶的情况,同时抑制成本增加。
11.例如,在特定情况下,车辆可以在低稳定性路面上行驶。根据这样的配置,在抑制成本增加的同时,可以判定车辆正在低稳定性路面上行驶的情况,因此低速行驶是不可避免的。
12.车辆可以进一步包括切换装置,该切换装置用于将行驶模式切换至包括用于在低稳定性路面上行驶的特定模式的任何一种模式。控制单元可以被配置为:判定切换装置是否将行驶模式切换至特定模式;以及当判定低速区间的次数大于规定次数并且行驶模式被切换至特定模式时,判定车辆处于特定情况。
13.根据这样的配置,在车辆在低稳定性路面上行驶的可能性高的情况下,当行驶模式被切换至用于在低稳定性路面上行驶的特定模式时,在抑制成本增加的同时,可以判定车辆正在低稳定性路面上行驶的情况,因此低速行驶是不可避免的。
14.例如,在特定情况下,车辆可以在拥堵的道路上行驶。根据这样的配置,在抑制成本增加的同时,可以判定车辆在拥堵的道路上行驶的情况,因此低速行驶是不可避免的。
15.车辆可以进一步包括发动机和发动机停止
‑
重启系统,该发动机停止
‑
重启系统被配置为在车速降低至特定速度时停止发动机的空转,并且在输入用于使车辆移动的操作时重新启动发动机。当判定车辆处于特定情况时,控制装置可以禁止发动机停止
‑
重启系统的操作。
16.根据这样的配置,当判定车辆处于不可避免低速行驶的情况时,可以禁止发动机停止
‑
重启系统的操作。因此,在不可避免低速行驶的情况下,可以防止驾驶员受到发动机的停止产生的有害影响的干扰。
17.控制装置可以被配置为:判定高速区间持续的次数是否大于特定次数,该高速区间是代表值超过规定速度的区间;以及当在车辆被判定为处于特定情况之后判定高速区间持续的次数大于特定次数时,判定车辆不再处于特定情况。
18.根据这样的配置,通过简单地使用由车速传感器检测的车速,在低速行驶区间不连续的情况下,即高速区间持续的次数大于特定次数,该高速区间是车辆从启动至停止的其中代表值超过规定速度的区间,可以判定车辆未处于不可避免低速行驶的情况。由此,可以判定车辆未处于不可避免低速行驶的情况,同时抑制成本增加。
19.根据本公开的另一方面,一种控制方法是由用于控制包括车速传感器的车辆的控制装置执行的控制方法。该控制方法包括以下步骤:控制装置使用由车速传感器检测的车速来识别车辆从启动至停止的区间;判定低速区间的次数是否大于规定次数,该低速区间是车速的代表值小于规定速度的所识别区间;以及当判定低速区间的次数大于规定次数时,判定车辆处于不可避免低速行驶的特定情况。
20.根据这样的配置,可以提供一种车辆控制方法,其能够判定不可避免低速行驶的情况,同时抑制成本增加。
21.根据本公开的又一方面,一种车辆包括车速传感器以及用于控制车辆的控制装置。该控制装置被配置为:使用由车速传感器检测的车速来识别车辆从启动至停止的区间;判定低速区间持续的次数是否大于规定次数,该低速区间是车速的代表值小于规定速度的所识别区间;以及当判定低速区间的次数大于规定次数时,判定车辆处于不可避免低速行
驶的特定情况。
22.根据这样的配置,可以提供一种车辆,其能够判定不可避免低速行驶的情况,同时抑制成本增加。
23.根据本公开,可以提供一种控制装置、控制方法和车辆,其能够判定不可避免低速行驶的情况,同时抑制成本增加。
附图说明
24.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的标号示出相同的元件,并且其中:
25.图1示出根据本公开的实施例的车辆的概要;
26.图2是示出第一实施例中的路面估计处理的流程的流程图;
27.图3示出路面状态与车速之间的关系;
28.图4示出用于说明第一实施例中的路面估计处理的行驶例;
29.图5示出第一实施例的变型例中的车辆的配置的概要;
30.图6是示出第二实施例中的发动机自动停止
‑
启动禁止处理的流程的流程图;
31.图7示出用于说明第二实施例中的发动机自动停止
‑
启动禁止处理的行驶例;
32.图8示出第二实施例的变型例中的车辆的配置的概要;以及
33.图9是示出第三实施例中的发动机自动停止
‑
启动禁止处理的流程的流程图。
具体实施方式
34.在下文中,将参考附图详细描述本公开的实施例。注意,相同或相似的部件由相同的附图标记表示,以省略其描述。
35.图1示出根据本公开的实施例的车辆的概要。参考图1,车辆1包括发动机10、变速器20、前轮40r、40l、后轮50r、50l、差动齿轮60、80、传动轴60a、60b、后驱动轴70r、70l、前驱动轴90r、90l、分动器100和电子控制单元(ecu)200。
36.发动机10通过在气缸中燃烧由进气和从燃料喷射装置(未示出)喷射的燃料组成的空气燃料混合物来产生动力。发动机10具有与变速器20联接的输出轴。发动机10中产生的动力被传递至变速器20。基于来自ecu 200的控制信号来控制发动机10的输出。
37.变速器20对来自发动机10的动力进行变速,并将变速后的动力传递至分动器100。在本实施例中,变速器20被示为自动变速器。然而,变速器20不限于自动变速器,并且例如可以是手动变速器。自动变速器也可以是具有多个档位的有级自动变速器,并且可以是以连续方式改变齿数比的无级自动变速器。
38.在本实施例中,通过从多个行驶档位(多个前进档位(例如,d、l、2)、后退档位(例如,r))和空(n)档位中选择任意一个档位来操作变速器20。ecu 200执行变速器20的自动变速控制,以使变速器20在对应于所选档位的行驶档位内操作。
39.分动器100与变速器20的输出轴串联联接。当车辆1以两轮驱动模式驱动时,分动器100将通过变速器20从发动机10输入的动力传递至传动轴60b。当车辆1以四轮驱动模式驱动时,分动器100将从变速器20输入的动力分配传递至传动轴60a、60b。
40.分动器100包括与变速器20的输出轴和传动轴60a联接的链轮108、与传动轴60b联
接的链轮110、缠绕在链轮108、110上的链条106、以及将从变速器20输入的动力传递至链轮110或中断至链轮110的传递的动力传递机构102。在分动器100中,储存有液压流体。
41.动力传递机构102通过致动器104的操作将从变速器20输入的动力传递至链轮110,或中断至链轮110的传递。致动器104可以用液压压力操作,并且可以是例如电机等。
42.当动力传递机构102将来自变速器20的输入传递至链轮110时,从变速器20输入的动力通过传动轴60b和链条106传递至传动轴60a,从而使车辆处于四轮驱动模式。
43.同时,当动力传递机构102中断从变速器20至链轮110的动力的传递时,从变速器20输入的动力仅传递至传动轴60b,而不通过链条106,从而使车辆处于两轮驱动模式。
44.动力传递机构102也是副变速器,其通过致动器104的操作在高速输出模式(hi模式)与低速输出模式(lo模式)之间切换。在hi模式下,对来自变速器20的输入以第一齿数比进行变速,并且将变速后的输入传递至传动轴60a、60b。在lo模式下,对来自变速器20的输入以低于第一齿轮比的第二齿轮比进行变速,并且将变速后的输出传递至传动轴60a、60b。
45.传递至传动轴60b的动力传至后侧差动齿轮60,然后通过后驱动轴70r、70l传递至后轮50r、50l。
46.当车辆1处于四轮驱动模式时,传递至传动轴60a的动力传至前侧差动齿轮80,然后通过前驱动轴90r、90l传递至前轮40r、40l。
47.当车辆1执行转弯行驶时,差动齿轮80、60分别吸收左前轮40l与右前轮40r之间或左后轮50l与右后轮50r之间的转速差。
48.ecu 200包括中央处理单元(cpu)210和存储器220。存储器220存储由cpu 210执行的各种程序和用于控制车辆1的数据,以及用于执行程序的数据。ecu 200连接至发动机速度传感器18、前轮40r、40l的轮速传感器52f、后轮50r、50l的轮速传感器52r和转换开关112。
49.发动机速度传感器18检测发动机10的输出轴的速度(以下称为发动机速度)。发动机速度传感器18将指示检测到的发动机速度的信号发送至ecu200。
50.轮速传感器52f、52r分别检测前轮40r和后轮50r的转速(以下分别称为前轮速度和后轮速度)。轮速传感器52f、52r将指示检测到的前轮速度和后轮速度的信号分别发送至ecu 200。在图1所示的车辆1中,设置有轮速传感器52f、52r。然而,可以替代地设置轮速传感器52f、52r之一。ecu200基于接收到的前轮速度和后轮速度以及轮胎的直径来计算车速。
51.转换开关112可由驾驶员操作,以将动力传递机构102的模式切换至h2模式、h4模式和l4模式之一。在h2模式下,hi模式和两轮驱动模式有效。在h4模式下,hi模式和四轮驱动模式有效。在l4模式下,lo模式和四轮驱动模式有效。转换开关112将指示所切换模式的信号发送至ecu 200。
52.ecu 200具有发动机停止
‑
重启功能。利用发动机停止
‑
重启功能,当基于来自轮速传感器52f、52r的车轮速度计算的车速降低至认为车辆1停止的特定速度(例如,可以是每小时0km或每小时10km)时,停止发动机10的空转,并且当制动踏板的操作被释放或加速踏板被操作时,重新启动发动机10。由ecu 200的发动机停止
‑
重启功能控制以停止发动机10的空转或重新启动发动机10的系统(包括ecu 200、发动机10、启动电机和电池的系统)被称为发动机停止
‑
重启系统。
53.第一实施例
54.假设如上所述配置的车辆1的车速降低至特定速度,同时车辆1正在越野路上行驶且分动器100被切换至lo模式的情况。在这种情况下,如果发动机停止
‑
重启系统使发动机停止,则会产生各种有害影响。例如,由于驱动力没有传递至前轮40r、40l和后轮50r、50l,车辆1的移动变得不稳定。发动机制动器往往变得不那么有效。在包括使用发动机10的负压的制动器的车辆1的情况下,制动操作需要更大的力。此外,在包括使用发动机10的输出的动力转向系统的车辆1的情况下,转向操作需要更大的力。
55.为了防止驾驶员受到有害影响的干扰,当分动器被切换至lo模式时,考虑禁止发动机停止
‑
重启系统的操作。
56.然而,当分动器被切换至lo模式时,即使车辆正在公路上而不是在越野路上行驶,发动机停止
‑
重启系统的操作也会被禁止。因此,无法抑制燃料成本。因此,即使在分动器被切换至lo模式时,也需要判定车辆是否真的处于不可避免低速行驶(诸如越野行驶)的情况。
57.还存在的问题是,通过使用照相机和昂贵的传感器等来测量车辆的行为以区分越野路和公路可能导致成本增加。
58.因此,在该实施例中,ecu 200使用由轮速传感器52f、52r检测的车速来识别车辆1从启动至停止的区间,判定低速区间的次数是否大于规定次数,该低速区间是车速的代表值小于规定速度的所识别区间,并且当判定低速区间的次数大于规定次数时,判定车辆1处于不可避免低速行驶的特定情况。
59.因此,通过简单地使用由轮速传感器52f、52r检测的车速,在低速行驶区间持续的情况下,即低速区间的次数大于规定次数,可以判定车辆处于不可避免低速行驶的情况,该低速区间是车辆1从启动至停止的其中代表值小于规定速度的区间。由此,可以判定不可避免低速行驶的情况,同时抑制成本增加。
60.图2是示出第一实施例中的路面估计处理的流程的流程图。参考图2,ecu 200按照从高位步骤起的顺序,针对每个规定时段调用并执行路面估计处理的处理。
61.在路面估计处理中,ecu 200的cpu 210判定分动器100是否被切换至低稳定性路面模式(该实施例中的l4模式)(步骤s111)。
62.图3示出路面状态与车速之间的关系。参考图3,每个曲线图指示车辆1从启动至停止的各个相应区间中的最高车速。纵轴表示车速。横轴表示路面状态。待测试的路面状态包括泥土路、岩石路、v形槽路、有槽地、斜坡路或碎石斜坡路、小坡路(mogul road)、沙质地、陡坡路或台阶路和低μ水平路的状态。
63.泥土路为未铺装道路,具有由泥土制成的平坦路面。岩石路是具有由岩石制成的路面的道路。v形槽路在垂直于车辆1的前进方向的横截面中具有v形沟槽。有槽地具有与车辆前进的道路相交的沟槽。斜坡或碎石斜坡路中的斜坡具有车辆在其上侧向倾斜的路面。碎石斜坡覆盖有诸如小石块、岩石或混凝土块的碎石物。小坡路的路面上具有隆起状的凹凸。沙质地具有由沙子制成的地面。陡坡路或台阶路中的陡坡路是具有陡坡度的上行或下行道路。台阶路具有与车辆前进的道路相交的台阶。低μ水平路是具有低摩擦系数μ的水平道路。
64.如图3所示,在车辆1从启动至停止的区间中,仅在泥土路和低μ水平路上标记最高车速为35km/h或更高。在车辆1从启动至停止的区间中,在其他路面(岩石路、v形槽路、有槽
地、斜坡路或碎石斜坡路、小坡路、沙质地、陡坡路或台阶路)上,最高车速不超过35km/h。在本实施例中,岩石路、v形槽路、有槽地、斜坡路或碎石斜坡路、小坡路、沙质地、陡坡路或台阶路的路面被称为“低稳定性路面”。相反,泥土路和低μ水平路还有已铺装道路的路面被称为“高稳定性路面”,与低稳定性路面相比,车辆1可以在高稳定性路面上稳定地行驶。
65.返回图2,当判定分动器100被切换至低稳定性路面模式时(步骤s111中的“是”),cpu 210使用来自轮速传感器52f、52r的信号判定车辆1是否已经停止(步骤s112)。当判定车辆1没有停止时(步骤s112中的“否”),cpu 210使用来自轮速传感器52f、52r的信号来识别当前车速(步骤s113)。
66.接下来,cpu 210判定所识别的车速是否是车辆1从启动至停止的当前区间中的最大车速(步骤s114)。当判定所识别的车速是当前区间中的最大车速时(步骤s114中的“是”),cpu 210将当前区间的最大车速更新为所识别的车速(步骤s115)。
67.当判定所识别的车速不是当前区间中的最大车速时(步骤s114中的“否”),或者在执行步骤s115之后,cpu 210将待执行的处理返回至路面估计处理的呼叫者的高位处理。
68.当判定车辆1已经停止时(步骤s112中的“是”),cpu 210判定车辆1从启动至停止的当前区间中的最大车速是否小于规定速度(在该实施例中,图3所示的35km/h),该规定速度是用于区分低稳定性路面和高稳定性路面的阈值(步骤s116)。当判定当前区间的最大车速小于规定速度时(步骤s116中的“是”),cpu 210估计当前区间和未来一段时间的区间具有低稳定性路面(步骤s117)。
69.当判定当前区间中的最大车速不小于规定速度时(步骤s116中的“否”),或者当判定分动器100未被切换至低稳定性路面模式时(步骤s111中的“否”),cpu 210估计当前区间和未来一段时间的区间具有高稳定性路面(步骤s118)。
70.在步骤s117或步骤s118之后,cpu 210将当前区间中的最大车速重置为零(步骤s119)。然后,cpu 210将待执行的处理返回至路面估计处理的呼叫者的高位处理。
71.图4示出用于说明第一实施例中的路面估计处理的行驶例。参考图4,当在行驶区间a中行驶期间,分动器100处于低稳定性路面模式时,执行图2的步骤s112至步骤s115。最终,该区间的最大车速被更新为va(km/h)。
72.在行驶区间a中停止时,在图2的步骤s116中判定最大车速va(km/h)不小于规定速度vth(km/h)。因此,在步骤s118中,行驶区间a和随后的区间被估计为具有高稳定性路面。
73.当在行驶区间b中行驶期间,分动器100处于低稳定性路面模式时,执行图2的步骤s112至步骤s115。最终,该区间的最大车速被更新为vb(km/h)。
74.在行驶区间b中停止时,在图2的步骤s116中判定最大车速vb(km/h)小于规定速度vth(km/h)。因此,在步骤s117中,行驶区间b和随后的区间被估计为具有低稳定性路面。
75.由于行驶区间c具有低稳定性路面,因此,在行驶区间b停止时所做的估计是正确的。因此,在低稳定性路面上,存在短时间内频繁重复启动和停止的趋势。因此,随后的区间具有低稳定性路面的估计更有可能是正确的。
76.第一实施例的变型例
77.在第一实施例中,ecu 200执行表示为图2所示的路面估计处理的程序(即,软件),以估计路面的状态。在第一实施例的变型例中,图2所示的路面估计处理由硬件电路实现。
78.图5示出第一实施例的变型例中的车辆1的配置的概要。参考图5,ecu200包括行驶
判定单元211、车速记录单元212、存储器220和路面判定单元213,其均由硬件电路构成。
79.如图2的步骤s112一样,行驶判定单元211根据由轮速传感器52检测的车轮40的转速来计算车速,并判定车辆1是处于行驶状态还是处于停止状态。如图2的步骤s113至步骤s115一样,当行驶判定单元211判定车速不为零时,如果在车辆1从启动至停止的区间中计算出的车速是最大车速,则车速记录单元212在存储器220中记录该计算出的车速。
80.如图2的步骤s116至步骤s119一样,路面判定单元213根据区间的最大车速是否小于规定速度,或者分动器100是否被置于低稳定性路面模式,来估计路面是低稳定性路面还是高稳定性路面。
81.第二实施例
82.在第一实施例中,如图2所示,估计路面是低稳定性路面还是高稳定性路面。在第二实施例中,当低稳定性路面的区间持续时,停止
‑
启动系统的操作被禁止。
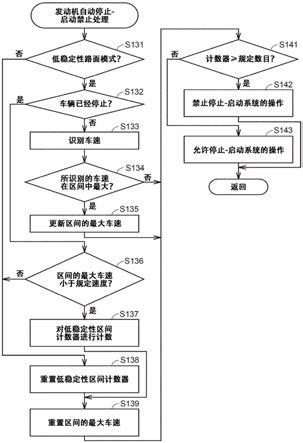
83.图6是示出第二实施例中的发动机自动停止
‑
启动禁止处理的流程的流程图。参考图6,ecu 200按照从高位处理起的顺序,针对每个规定时段调用并执行停止
‑
启动估计处理中的处理。由于步骤s131至步骤s136的处理类似于图2的步骤s111至步骤s116的处理,因此,不再重复多余的描述。
84.当判定当前区间的最大车速小于规定速度时(步骤s136中的“是”),cpu 210对低稳定性区间计数器中指示的值进行计数(步骤s137)。低稳定性区间计数器用于计算低稳定性路面的区间持续的次数。
85.当判定当前区间中的最大车速不小于规定速度时(步骤s136中的“否”),或者当判定分动器100未被切换至低稳定性路面模式时(步骤s131中的“否”),cpu 210将由低稳定性区间计数器指示的值重置为零(步骤s138)。
86.在步骤s137或步骤s138之后,cpu 210将当前区间中的最大车速重置为零(步骤s139)。接下来,cpu 210判定由低稳定性区间计数器指示的值是否等于或大于规定数目(例如,等于1或以上的规定整数)(步骤s141)。
87.当判定低稳定性区间计数器的值是规定数目或以上时(步骤s141中的“是”),cpu 210禁止停止
‑
启动系统的操作(步骤s142)。当判定低稳定性区间计数器的值不是规定数目或以上时(步骤s141中的“否”),cpu 210允许停止
‑
启动系统的操作(步骤s143)。在步骤s142或步骤s143之后,cpu210将待执行的处理返回至路面估计处理的呼叫者的高位处理。
88.图7示出用于说明第二实施例中的发动机自动停止
‑
启动禁止处理的行驶例。参考图7,当在行驶区间a中行驶期间,分动器100处于低稳定性路面模式时,执行图6的步骤s132至步骤s135。最终,该区间的最大车速被更新为va(km/h)。
89.在行驶区间a中停止时,在图6的步骤s136中判定最大车速va(km/h)小于规定速度vth(km/h)。因此,在步骤s137中,对低稳定性区间计数器进行计数。例如,在规定数目为1时低稳定性区间计数器的值为1的情况下,在步骤s141中判定低稳定性区间计数器的值为规定数目或以上。因此,在步骤s142中,停止
‑
启动系统的操作被禁止。因此,即使车辆1在行驶区间b中或之后停止,发动机10也不会被停止
‑
启动系统停止。
90.当在行驶区间z中行驶期间,分动器100处于低稳定性路面模式时,执行图6的步骤s132至步骤s135。最终,该区间的最大车速被更新为vz(km/h)。
91.在行驶区间z中停止时,在图6的步骤s136中判定最大车速vz(km/h)不小于规定速
度vth(km/h)。因此,在步骤s138中,低稳定性区间计数器被重置。当在步骤s131中判定分动器100不再处于低稳定性路面模式时,低稳定性区间计数器也在步骤s138中被重置。因此,在步骤s141中判定低稳定性区间计数器的值不是规定数目或以上,并且在步骤s143中允许停止
‑
启动系统的操作。因此,在随后的区间中,停止
‑
启动系统运行,因此,燃料成本可以被抑制。
92.第二实施例的变型例
93.在第二实施例中,当ecu 200执行表示为图6所示的发动机自动停止
‑
启动禁止处理的程序(即,软件)时,停止
‑
启动系统的操作被禁止或允许。在第二实施例的变型例中,图6所示的发动机自动停止
‑
启动禁止处理由硬件电路实现。
94.图8示出第二实施例的变型例中的车辆1a的配置的概要。参考图8,ecu 200a包括行驶判定单元211、车速记录单元212、存储器220、计数单元214和停止
‑
启动禁止单元215,其均由硬件电路构成。由于行驶判定单元211、车速记录单元212和存储器220在图5中示出,因此,不再重复其多余的描述。
95.如图6的步骤s136至步骤s139一样,计数单元214根据区间的最大车速是否小于规定速度,或者分动器100是否被置于低稳定性路面模式,来对低稳定性区间计数器进行计数或重置。
96.如图6的步骤s141至s143一样,停止
‑
启动禁止单元215根据低稳定性区间计数器的值是否是规定数目或以上来禁止或允许停止
‑
启动系统的操作。
97.第三实施例
98.在第二实施例中,当低稳定性路面的区间持续时,停止
‑
启动系统的操作被禁止。在第三实施例中,当拥堵区间持续时,停止
‑
启动系统的操作被禁止。
99.图9是示出第三实施例中的发动机自动停止
‑
启动禁止处理的流程的流程图。参考图9,ecu 200按照从高位处理起的顺序,针对每个规定时段调用并执行停止
‑
启动估计处理中的处理。在图9的步骤中,与图6的步骤具有相同编号的步骤与图6中的步骤相同,因此,不再重复多余的描述。
100.当判定当前区间的最大车速小于规定速度时(步骤s136中的“是”),cpu 210对拥堵区间计数器中指示的值进行计数(步骤s137a)。拥堵区间计数器用于计算拥堵区间(车辆从启动至停止的区间)持续的次数。
101.当判定当前区间的最大车速不小于规定速度时(步骤s136中的“否”),cpu 210将拥堵计数器中指示的值重置为零(步骤s138a)。在步骤s137a或步骤s138a之后,cpu 210将当前区间中的最大车速重置为零(步骤s139)。
102.其他变型例
103.(1)在公开的实施例中,如图2、图6和图9的步骤s132至步骤s135所示,使用车辆1从启动至停止的区间的最大车速来判定不可避免车辆1的低速行驶的特定情况。然而,本发明不限于此。只要使用车辆1从启动至停止的区间中的车速的代表值来进行判定,该代表值可以是其他代表值(诸如该区间的车速的平均值),并且可以是该区间的车速的中间值。
104.(2)在公开的实施例中,如图2的s116以及图6和图9的步骤s136所示,当车辆1从启动至停止的区间的最大车速小于规定速度时,所完成的区间和未来的随后的区间被估计为具有低稳定性路面的区间或拥堵区间。然而,本发明不限于所完成的区间和随后的区间被
估计为具有低稳定性路面的区间或拥堵区间的配置。只要判定车辆1处于不可避免低速行驶的特定情况,这些区间就可以被估计为处于其他情况。
105.(3)在如图2的步骤s116和步骤s117、图6的步骤s136和步骤s137、图9的步骤s136和步骤s137a所示的公开的实施例中,当判定车辆1从启动至停止的区间的车速的代表值小于规定速度时,所完成的区间和未来的随后的区间被估计为处于不可避免低速行驶的特定情况(例如,具有低稳定性路面的区间或拥堵区间)。
106.然而,本发明不限于此。可以判定低速区间的次数是否大于规定次数,该低速区间是代表值小于规定速度的区间,并且当判定低速区间的次数大于规定次数(等于1或以上的规定整数)时,可以判定车辆1处于不可避免低速行驶的特定情况。可以认为,图2、图6和图9示出规定次数为1的示例。
107.(4)在如图2的步骤s116和步骤s118、图6的步骤s136和步骤s138以及图9的步骤s136和步骤s138a所示的公开的实施例中,当在判定车辆1处于特定情况之后判定代表值超过规定速度时,判定车辆1不再处于特定情况。
108.然而,本发明不限于此。可以判定高速区间持续的次数是否大于特定次数(例如,等于1或以上的规定整数),该高速区间是代表值超过规定速度的区间,并且当在车辆被判定为处于特定情况之后判定高速区间持续的次数大于特定次数时,判定车辆1不再处于特定情况。可以认为,图2、图6和图9示出特定次数为1的示例。
109.(5)在公开的实施例中,轮速传感器52f、52r被用作用于检测车速的传感器,如图1所示。然而,本发明不限于此。用于检测车速的传感器可以是其他传感器。例如,检测发动机或变速器的旋转部的转速的传感器可以计算车速,从而可以检测车速。
110.(6)在公开的实施例中,用于识别代表值的区间是车辆1从启动至停止的区间。然而,本发明不限于此。用于识别最大车速的区间可以是车辆1从实际启动至停止的区间。该区间的示例可以包括从车辆1的启动至发动机10的空转停止的区间、从发动机10的重新启动至车辆1的停止的区间、从发动机10的重新启动至发动机10的空转停止的区间、在车速超过0km/h之后直至车速达到0km/h的区间、以及在车速超过规定的非常低的速度(例如,10km/h)之后直至车速变得低于规定的非常低的速度的区间。
111.(7)在公开的实施例中,分动器100的动力传递机构102具有切换四轮驱动模式和两轮驱动模式的功能,以及切换hi模式和lo模式的功能。然而,本发明不限于此。分动器100的动力传递机构102可以不包括切换四轮驱动模式和两轮驱动模式的功能,并且可以始终处于四轮驱动模式。分动器100的动力传递机构102可能不具有切换hi模式和lo模式的功能。可以设置吸收前轮40r、40l与后轮50r、50l之间的转速差的中央差速器。中央差速器可以基于来自ecu 200的控制信号被操作,或者中央差速器可以被锁定(以防止前轮40r、40l与后轮50r、50l之间的转速差的吸收)。
112.(8)在公开的实施例中,如图1所示,可切换的行驶模式包括l4模式。然而,本发明不限于此。可切换的行驶模式可以包括用于在低稳定性路面上行驶的特定模式。当分动器100的动力传递机构102不具有切换hi模式和lo模式的功能时,特定模式可以是lo模式。当分动器100设置有中央差速器时,特定模式可以是用于锁定中央差速器的模式。
113.(9)除了车辆1前进的情况之外,公开的实施例还适用于车辆1后退的情况。
114.(10)公开的实施例已经被描述为车辆1和车辆1a的公开。然而,本发明不限于此。
公开的实施例可以被理解为类似于ecu 200的控制装置的公开,并且还可以被理解为控制装置的控制方法的公开。
115.结论
116.(1)如图1所示,ecu 200是用于控制包括车速传感器(例如,轮速传感器52r、52f)的车辆1的控制装置。如图2、图6和图9所示,ecu 200使用由车速传感器检测的车速来识别车辆1从启动至停止的区间(例如,图2的步骤s112、图6和图9的步骤s132)。ecu 200判定低速区间的次数是否大于规定次数,该低速区间是车速的代表值(例如,车辆1的车速的最大值、平均值和中间值)小于规定速度(例如,用于判定不可避免低速行驶的特定情况的参考速度)的所识别区间(例如,图2的步骤s116以及图6和图9的步骤s136)。当判定低速区间的次数大于规定次数时,ecu 200判定车辆处于不可避免低速行驶的特定情况(例如,图2的步骤s117、图6的步骤s137和图9的步骤s137a)。
117.因此,通过简单地使用由车速传感器检测的车速,在低速行驶区间持续的情况下,即低速区间的次数大于规定次数,该低速区间是其中代表值小于规定速度的车辆1的从启动至停止的区间,可以判定车辆处于不可避免低速行驶的情况。因此,可以判定不可避免低速行驶的情况,同时抑制成本增加。
118.(2)如图2所示,在特定情况下,车辆1在低稳定性路面上行驶。因此,可以在抑制成本增加的同时判定车辆1正在低稳定性路面上行驶的情况,因此,低速行驶是不可避免的。
119.(3)如图1所示,车辆1进一步包括切换装置(例如,转换开关112和分动器100),用于将行驶模式切换至包括用于在低稳定性路面上行驶的特定模式的任何一种模式(例如,l4模式)。如图2和图6所示,ecu 200判定切换装置是否将行驶模式切换至特定模式(例如,图2的步骤s111和图6的步骤s131),并且当判定低速区间的次数大于规定次数并且行驶模式切换至特定模式时,判定车辆1处于特定情况(例如,图2的步骤s117和图6的步骤s137)。
120.因此,当行驶模式被切换至用于在低稳定性路面上行驶的特定模式时,在低稳定性路面上行驶的可能性高的情况下,可以在抑制成本增加的同时判定车辆1正在低稳定性路面上行驶的情况,因此,低速行驶是不可避免的。
121.(4)如图9所示,在特定情况下,车辆1在拥堵的道路上行驶。因此,可以在抑制成本增加的同时判定车辆1在拥堵的道路上行驶的情况,因此,低速行驶是不可避免的。
122.(5)如图1所示,车辆1进一步包括发动机10和发动机停止
‑
重启系统,该发动机停止
‑
重启系统被配置为在车速降低至特定速度时停止发动机10的空转,并且在输入用于使车辆1移动的操作时重新启动发动机10。如图6和图9所示,当判定车辆1处于特定情况时,ecu 200禁止发动机停止
‑
重启系统的操作(例如,图6和图9的步骤s142)。
123.因此,当判定车辆处于不可避免低速行驶的情况时,可以禁止发动机停止
‑
重启系统的操作。因此,在不可避免低速行驶的情况下,可以防止驾驶员受到发动机10停止产生的有害影响的干扰。
124.(6)如图2、图6和图9所示,ecu 200判定高速区间持续的次数是否大于特定次数,该高速区间是代表值超过规定速度的区间(例如,图2的步骤s116以及图6和9的步骤s136),以及当在车辆被判定为处于特定情况之后判定高速区间持续的次数大于特定次数时,判定车辆不再处于特定情况(例如,图2的步骤s118、图6的步骤s138和图9的步骤s138a)。
125.因此,通过简单地使用由车速传感器检测的车速,在低速行驶区间不连续的情况
下,即高速区间持续的次数大于特定次数,该高速区间是其中代表值超过规定速度的车辆1和车辆1a从启动至停止的区间,可以判定车辆未处于不可避免低速行驶的情况。因此,可以判定不可避免低速行驶的情况,同时抑制成本增加。
126.应当理解,所公开的实施例在所有方面都是示例性的,并且不被认为是限制性解释的基础。本公开的范围并不是由前述的描述来限定,而是由所附权利要求的范围来限定。因此,落入权利要求的范围及其等效的含义和范围内的所有改变都意图包含在其中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。