技术特征:
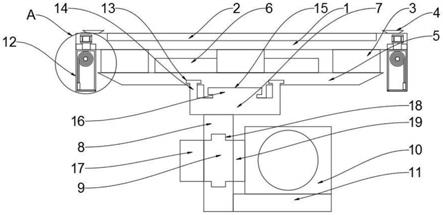
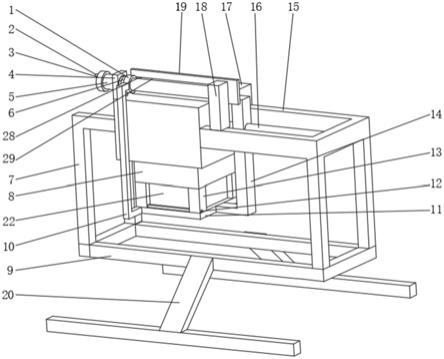
1.一种无人飞行器,包括有圆柱状的无人机主体(1),其特征在于,所述无人机主体(1)的外周面固定有多个连接臂(2),多个所述连接臂(2)环绕所述无人机主体(1)径向平面的中轴线逐一等距设置,每个所述连接臂(2)远离无人机主体(1)的一端顶部均通过转轴转动连接有螺旋桨(4),每个所述连接臂(2)壳体上均连接有缓冲组件(3);
每个所述缓冲组件(3)均包括有丝杆(37),每个所述丝杆(37)的一端均延伸至无人机主体(1)内部且通过轴承座固定于对应连接臂(2)的垂直正下方,每个所述丝杆(37)壳体上均通过丝母连接有调节环(31),每个所述调节环(31)均套设于对应连接臂(2)壳体上并与连接臂(2)外表面滑动连接,每个所述调节环(31)的壳体上均滑动连接有u形连接块(32),每个所述u形连接块(32)远离对应调节环(31)的一侧均固定有多个l形缓冲条(33),每个所述u形连接块(32)均通过l形缓冲条(33)连接有弧形缓冲环(34)。
2.根据权利要求1所述的一种无人飞行器,其特征在于,每个所述调节环(31)均为中空结构,每个所述调节环(31)底端的两侧表面均开设有供u形连接块(32)滑动的方形通孔(311)。
3.根据权利要求2所述的一种无人飞行器,其特征在于,每个所述u形连接块(32)的内壁均固定有对称设置的滑动柱(321),每个所述滑动柱(321)均贯穿对应方形通孔(311)延伸至调节环(31)内部与第一钕磁铁(35)相连接。
4.根据权利要求3所述的一种无人飞行器,其特征在于,每个所述调节环(31)的内部均固定有第二钕磁铁(36),每个所述第二钕磁铁(36)均与对应所述第一钕磁铁(35)磁性相斥。
5.根据权利要求1所述的一种无人飞行器,其特征在于,每个所述调节环(31)的顶端均开设有缺口(312)。
6.根据权利要求1所述的一种无人飞行器,其特征在于,每个所述连接臂(2)的外周面均开设有滑槽(21),每个所述滑槽(21)内均滑动连接有滚珠(38),每个所述滚珠(38)均固定于对应调节环(31)的内表面。
7.根据权利要求1所述的一种无人飞行器,其特征在于,每个所述弧形缓冲环(34)的外表面均粘接有橡胶条(341)。
技术总结
本实用新型提供了一种无人飞行器,包括有圆柱状的无人机主体,所述无人机主体的外周面固定有多个连接臂,每个所述连接臂的一端顶部均转动连接有螺旋桨,每个所述连接臂壳体上均连接有缓冲组件,每个所述缓冲组件均包括有丝杆,每个所述丝杆壳体上均通过丝母连接有调节环,每个所述调节环均套设于对应连接臂壳体上并与连接臂外表面滑动连接,每个所述调节环的壳体上均滑动连接有U形连接块,每个所述U形连接块远离对应调节环的一侧均固定有多个L形缓冲条,每个所述U形连接块均通过L形缓冲条连接有弧形缓冲环。本实用新型通过缓冲组件和装有螺旋桨的连接臂的配合,能够为无人机的螺旋桨提供良好的防撞能力,从而提高了无人机的使用寿命。
技术研发人员:杨彤彤;房良琦;石鹤;任坤;张鑫
受保护的技术使用者:宁夏越泰农业科技有限公司
技术研发日:2020.11.19
技术公布日:2021.08.27
本文用于企业家、创业者技术爱好者查询,结果仅供参考。