1.本发明属于无人机技术领域,更具体地说,特别涉及一种基于高层建筑辅助逃生无人机。
背景技术:
2.期以来,高层建筑救援一直是难题,并常常伴随着生命危险,又因为救援人员很难判断高空险情并及时抵达。火灾、水灾、高层建筑施工突发事件等险情的发生可能造成人员被困,无法将所需物资及时送达。
3.例如申请号:cn202010753524.3,一种可用于高楼火灾紧急救援的无人机,包括无人机以及设置于所述无人机中的蓄水腔,所述蓄水腔中设有与外界连通的注水口,所述蓄水腔中设有与外界连通的洒水管,所述洒水管中设有水泵,所述无人机中设有位于所述蓄水腔下侧的夹紧腔,所述夹紧腔中设有夹紧机构,所述夹紧机构可以夹紧被困者,所述夹紧腔下端设有与外界连通的夹紧口,所述无人机中对称设有位于所述蓄水腔下侧的碎窗腔,本装置可以自动寻找火灾中的被困群众并可以清出一条通往窗户的路,同时可以在人无意识的时候自动捆绑被困者将其从窗户处救出并缓慢放到楼下,并且可以根据人体重量而选择合适的放线速度,防止因放线速度过快而导致人快速坠落。
4.基于上述专利的检索,以及结合现有技术中的设备发现,上述设备在应用时,辅助逃生无人机一般只能搭载相应的救援设备,在先需要其他设备且较为紧急的情况下不能进行有效的快速拆卸和安装搭载不同的救援设备,进而影响救援速度,再者,进行辅助逃生工具的输送一般为抛投的方式,不能将救援绳以及其他的救援设备及时的交给到被救援者的手中。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种基于高层建筑辅助逃生无人机,以解决辅助逃生无人机一般只能搭载相应的救援设备,在先需要其他设备且较为紧急的情况下不能进行有效的快速拆卸和安装搭载不同的救援设备,进而影响救援速度,再者,进行辅助逃生工具的输送一般为抛投的方式,不能将救援绳以及其他的救援设备及时的交给到被救援者的手中的问题。
6.本发明一种基于高层建筑辅助逃生无人机的目的与功效,由以下具体技术手段所达成:
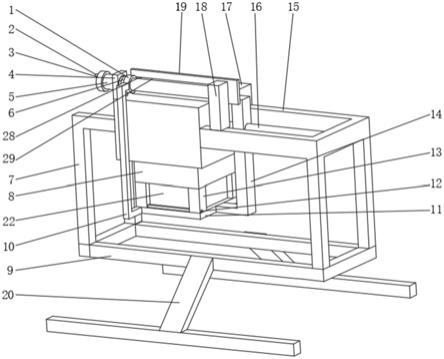
7.一种基于高层建筑辅助逃生无人机,包括固定机构;所述固定机构底部固定安装有安装机构;所述安装机构包括有上固定板、固定轴、转动环、滑动块、调节杆、安装板和连接框,上固定板顶部中间位置固定链接有一个固定轴,固定轴底部转动连接有一个转动环,上固定板顶部内侧左右两侧滑动设置有两个滑动块,右侧滑动块顶部固定设置有调节杆,且调节杆右侧穿过并伸出上固定板右侧,安装板顶部固定设置有连接框,且连接框顶部嵌入到上固定板底部内侧;所述安装机构底部通过螺栓固定安装有连接机构;所述连接机构
前端通过螺栓固定安装有一个夹持机构;所述固定机构外侧通过螺栓呈环形排列固定安装有四个支撑机构;所述固定机构左右两侧前后对称安装有四个减震机构。
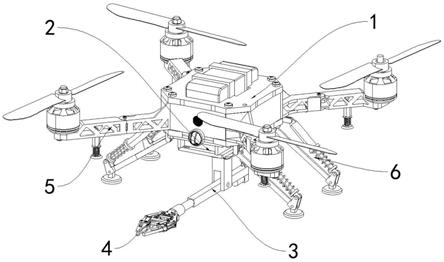
8.进一步的,所述固定机构包括有外部支撑架、转动连接座、摄像头、扬声器、连接螺栓和内部控制总成,外部支撑架底部以及外侧呈环形排列设置有八个转动连接座,外部支撑架内部设置有内部控制总成,外部支撑架前端固定设置有一个摄像头,且外部支撑架前端还固定设置有扬声器,外部支撑架顶部呈环形排列穿插固定有连接螺栓。
9.进一步的,所述上固定板底部内侧设置有截面为t形的滑块,滑动块顶部均开设有矩形贯穿孔,该矩形贯穿孔可沿上固定板的滑块外侧左右往复运动,转动环外侧设置有传动齿,传动齿前后两侧交错传动连接有齿条,齿条分别与滑动块固定连接,且齿条一侧设置有圆柱且相互嵌入滑动块内侧,并且圆柱外侧设置有弹簧,滑动块一侧均设置卡合凸起,连接框左右两侧开设有卡合槽,安装状态下,上固定板和固定轴顶部均固定安装在外部支撑架底部。
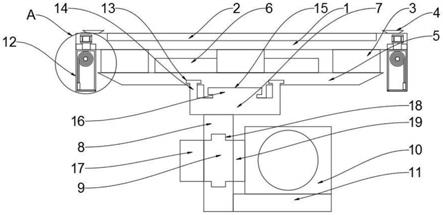
10.进一步的,所述连接机构包括有顶部安装座、支撑轴、第一电动推杆、第二电动推杆和夹持固定架,顶部安装座底部固定设置有支撑轴,支撑轴底部转动连接有第二电动推杆,第二电动推杆右侧与顶部安装座之间通过第一电动推杆固定连接,第二电动推杆左端固定设置有夹持固定架,安装状态下,顶部安装座顶部通过螺栓固定安装在安装板底部。
11.进一步的,所述夹持机构包括有行星齿轮减速电机、支撑框架、调节滑块、h形连接块、 v形连接杆和夹持爪,行星齿轮减速电机前端固定设置有支撑框架,支撑框架中间位置穿插有一个丝杆,丝杆一端与行星齿轮减速电机传动连接,且丝杆的另一端传动连接有调节滑块,支撑框架左右两侧通过转轴转动连接有两个v形连接杆,v形连接杆一侧通过h形连接块均转动连接有夹持爪,v形连接杆另一侧通过h形连接块与调节滑块左右两端固定连接,两个夹持爪相对一侧均通过h形连接块与支撑框架前端转动连接,安装状态下行星齿轮减速电机嵌入安装在夹持固定架内部,夹持固定架通过螺栓于支撑框架固定连接。
12.进一步的,所述支撑机构包括有第一伸展臂、第二伸展臂、机翼电机、固定安装块和卡扣,第一伸展臂通过转轴转动连接有第二伸展臂,第二伸展臂一端顶部固定连接有机翼电机,第一伸展臂与第二伸展臂连接的一端内侧设置有一个卡扣,且第一伸展臂和第二伸展臂之间设置有固定安装块,卡扣与第一伸展臂内侧设置有弹簧,卡扣顶部一侧可嵌入固定安装块一侧设置的凹槽内部,安装状态下,第一伸展臂通过连接螺栓固定连接在外部支撑架上。
13.进一步的,所述减震机构包括有底部支撑座、联动连接座、转动固定杆、转动杆和活动连接杆,底部支撑座顶部铰链连接有一个联动连接座,联动连接座顶部铰链连接有一个转动固定杆,且转动固定杆顶部末端外侧套设有一个活动连接杆,底部支撑座底部左侧固定连接有一个转动杆,活动连接杆与转动固定杆之间设置有减震弹簧,安装状态下,转动杆和活动连接杆顶部末端与外部支撑架的转动连接座铰链连接。
14.与现有技术相比,本发明具有如下有益效果:
15.滑动块和调节杆的设置,有利于提高无人机的逃生效率和安全性,通过外部支撑架上的摄像头对高楼进行观察,快速找出被施救者,并通过扬声器进行喊话,安抚逃生者情绪以及指挥逃生者进行快速逃生撤离,按压调节杆带动两个滑动块在转动环外侧移动并相互靠近,滑动块两侧脱离连接框内侧并可拆卸安装板,安装安装板时,将安装板上连接框卡
入到上固定板底部,滑动块受挤压相互靠近,直至完全卡入到上固定板底部内侧,滑动块受弹簧弹力同时向外移动将连接框固定,实现快速安装,能够有效的快速拆卸和装搭载不同的救援设备,避免出现搭载对应救援设备的无人机数量不足时的情况,进而提高逃生者逃生安全性。
16.第二电动推杆和加持机构的设置,有利于提高无人对于不同机构楼层的适应性,对于较为狭窄地段,控制无人机靠近被救援人,通过第一电动推杆,控制第二电动推杆的倾斜度,再通过第二电动推杆进行伸长,将夹持机构上的救援绳以及急救物品交到被救援者手中,相比于投射的方式,能够及时的将物品进行交涉。
附图说明
17.图1是本发明的轴视结构示意图。
18.图2是本发明固定机构的轴视结构示意图。
19.图3是本发明安装机构拆分的仰轴视结构示意图。
20.图4是本发明连接机构的轴视结构示意图。
21.图5是本发明夹持机构的轴视结构示意图。
22.图6是本发明支撑机构的轴视结构示意图。
23.图7是本发明减震机构的轴视结构示意图。
24.图8是本发明上固定板安装板和连接框的侧剖结构示意图。
25.图9是本发明卡扣和固定安装块配合的侧剖结构示意图。
26.图中,部件名称与附图编号的对应关系为:
27.1、固定机构;101、外部支撑架;102、转动连接座;103、摄像头;104、扬声器;105、连接螺栓;106、内部控制总成;2、安装机构;201、上固定板;202、固定轴;203、转动环; 204、滑动块;205、调节杆;206、安装板;207、连接框;3、连接机构;301、顶部安装座; 302、支撑轴;303、第一电动推杆;304、第二电动推杆;305、夹持固定架;4、夹持机构;401、行星齿轮减速电机;402、支撑框架;403、调节滑块;404、h形连接块;405、v形连接杆;406、夹持爪;407、丝杆;5、支撑机构;501、第一伸展臂;502、第二伸展臂;503、机翼电机;504、固定安装块;505、卡扣;6、减震机构;601、底部支撑座;602、联动连接座;603、转动固定杆;604、转动杆;605、活动连接杆。
具体实施方式
28.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
29.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连
接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
31.实施例:
32.如附图1至附图9所示:
33.本发明提供一种基于高层建筑辅助逃生无人机,包括固定机构1;固定机构1底部固定安装有安装机构2;安装机构2包括有上固定板201、固定轴202、转动环203、滑动块204、调节杆205、安装板206和连接框207,上固定板201顶部中间位置固定链接有一个固定轴 202,固定轴202底部转动连接有一个转动环203,上固定板201顶部内侧左右两侧滑动设置有两个滑动块204,右侧滑动块204顶部固定设置有调节杆205,且调节杆205右侧穿过并伸出上固定板201右侧,安装板206顶部固定设置有连接框207,且连接框207顶部嵌入到上固定板201底部内侧;安装机构2底部通过螺栓固定安装有连接机构3;连接机构3前端通过螺栓固定安装有一个夹持机构4;固定机构1外侧通过螺栓呈环形排列固定安装有四个支撑机构5;固定机构1左右两侧前后对称安装有四个减震机构6。
34.其中,固定机构1包括有外部支撑架101、转动连接座102、摄像头103、扬声器104、连接螺栓105和内部控制总成106,外部支撑架101底部以及外侧呈环形排列设置有八个转动连接座102,外部支撑架101内部设置有内部控制总成106,外部支撑架101前端固定设置有一个摄像头103,且外部支撑架101前端还固定设置有扬声器104,外部支撑架101顶部呈环形排列穿插固定有连接螺栓105,通过摄像头103对高楼进行观察,快速找出被施救者,并通过扬声器104进行喊话,安抚逃生者情绪以及指挥逃生者进行快速逃生撤离。
35.其中,上固定板201底部内侧设置有截面为t形的滑块,滑动块204顶部均开设有矩形贯穿孔,该矩形贯穿孔可沿上固定板201的滑块外侧左右往复运动,转动环203外侧设置有传动齿,传动齿前后两侧交错传动连接有齿条,齿条分别与滑动块204固定连接,且齿条一侧设置有圆柱且相互嵌入滑动块204内侧,并且圆柱外侧设置有弹簧,滑动块204一侧均设置卡合凸起,连接框207左右两侧开设有卡合槽,安装状态下,上固定板201和固定轴202 顶部均固定安装在外部支撑架101底部,通过滑动块204和调节杆205实现快速拆卸和安装。
36.其中,连接机构3包括有顶部安装座301、支撑轴302、第一电动推杆303、第二电动推杆304和夹持固定架305,顶部安装座301底部固定设置有支撑轴302,支撑轴302底部转动连接有第二电动推杆304,第二电动推杆304右侧与顶部安装座301之间通过第一电动推杆 303固定连接,第二电动推杆304左端固定设置有夹持固定架305,安装状态下,顶部安装座 301顶部通过螺栓固定安装在安装板206底部,通过第一电动推杆303和第二电动推杆304 配合可以将救援物品交到被困人员手中。
37.其中,夹持机构4包括有行星齿轮减速电机401、支撑框架402、调节滑块403、h形连接块404、v形连接杆405和夹持爪406,行星齿轮减速电机401前端固定设置有支撑框架402,支撑框架402中间位置穿插有一个丝杆407,丝杆407一端与行星齿轮减速电机401传动连接,且丝杆407的另一端传动连接有调节滑块403,支撑框架402左右两侧通过转轴转动连接有两个v形连接杆405,v形连接杆405一侧通过h形连接块404均转动连接有夹持爪406, v形连接杆405另一侧通过h形连接块404与调节滑块403左右两端固定连接,两个夹持爪 406相对一侧均通过h形连接块404与支撑框架402前端转动连接,安装状态下行星齿轮减速电机
401嵌入安装在夹持固定架305内部,夹持固定架305通过螺栓于支撑框架402固定连接,通过行星齿轮减速电机401带动进行加持操作。
38.其中,支撑机构5包括有第一伸展臂501、第二伸展臂502、机翼电机503、固定安装块 504和卡扣505,第一伸展臂501通过转轴转动连接有第二伸展臂502,第二伸展臂502一端顶部固定连接有机翼电机503,第一伸展臂501与第二伸展臂502连接的一端内侧设置有一个卡扣505,且第一伸展臂501和第二伸展臂502之间设置有固定安装块504,卡扣505与第一伸展臂501内侧设置有弹簧,卡扣505顶部一侧可嵌入固定安装块504一侧设置的凹槽内部,安装状态下,第一伸展臂501通过连接螺栓105固定连接在外部支撑架101上,通过按压卡扣505可以快速拆卸固定安装块504便于第二伸展臂502折叠。
39.其中,减震机构6包括有底部支撑座601、联动连接座602、转动固定杆603、转动杆604 和活动连接杆605,底部支撑座601顶部铰链连接有一个联动连接座602,联动连接座602顶部铰链连接有一个转动固定杆603,且转动固定杆603顶部末端外侧套设有一个活动连接杆 605,底部支撑座601底部左侧固定连接有一个转动杆604,活动连接杆605与转动固定杆603 之间设置有减震弹簧,安装状态下,转动杆604和活动连接杆605顶部末端与外部支撑架101 的转动连接座102铰链连接,减震机构6在无人机起落时起到减震支撑的作用。
40.本实施例的具体使用方式与作用:
41.本发明中,使用时,如果出现高楼火灾需要进行逃生救援时,通过启动无人机进行快速辅助救援时,通过控制行星齿轮减速电机401带动丝杆407旋转丝杆407带动滑动块204向后移动,通过h形连接块404和v形连接杆405之间配合带动夹持爪406将救援绳以及急救物品固定,通过启动无人机将物品进行输送,通过外部支撑架101上的摄像头103对高楼进行观察,快速找出被施救者,并通过扬声器104进行喊话,安抚逃生者情绪以及指挥逃生者进行快速逃生撤离,对于较为狭窄地段,控制无人机靠近被救援人,通过第一电动推杆303,控制第二电动推杆304的倾斜度,再通过第二电动推杆304进行伸长,将夹持机构4上的救援绳以及急救物品交到被救援者手中,在无人机较为紧张的以及现场事故不可控情况下,搭载有对应设备的辅助逃生无人机数量不充足时,可以按压调节杆205带动两个滑动块204在转动环203外侧移动并相互靠近,滑动块204两侧脱离安装板206上连接框内侧,此时安装板206以及底部的设备被快速拆卸,然后把连接有其他救援设备的安装板206安装到上固定板201底部,当连接框卡入到上固定板201底部时,滑动块204相互靠近,直至207完全卡入到上固定板201底部内侧,滑动块204受弹簧弹力同时向外移动,滑动块204一侧卡合到 207内侧并固定,实现快速安装,能够有效的快速拆卸和装搭载不同的救援设备,避免出现搭载对应救援设备的无人机数量不足时的情况,进而提高逃生者逃生安全性。
42.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。