1.本发明属于机械系统结构设计领域,涉及一种襟翼运动机构的试验台架,并且更具体涉及一种随动加载的民用飞行器襟翼运动机构的试验台架,用于襟翼运动机构传动效率测量和机构耐久性试验。
背景技术:
2.襟翼机构是诸如民用飞机之类的飞行器的重要增升装置,其主要用于延缓机翼上的气流分离,提高了飞行器的临界迎角,并增大机翼的升力系数。现代民用飞行器为提高飞行器起降性能,增大起降阶段升力,普遍采用襟缝翼增升装置,以便增大机翼弯度和机翼面积。为实现该功能,襟缝翼(或襟翼)收放机构的准确性和可靠性至关重要,需要能够准确测量机构的传动效率,以及该收放机构在整个服役期间效率变化并验证机构的耐久性。此外机构的传动效率也是襟缝翼操纵系统/高升力系统的重要设计输入之一,影响系统设计载荷的计算。然而,由于襟翼机构体积大、重量大、结构和功能原理复杂,因此襟翼气动力载荷的随动加载就成了其可靠性试验的核心内容。
3.在发明人作为共同作者的、题为《增升装置的运动机构的传动效率》(transmission efficiency of the motion mechanism in high
‑
lift devices,《飞机杂志》第57卷,4号,2020年7月)的论文中,公开了后缘缝翼运动机构轴承摩擦力矩、驱动速度和外部载荷对于传动效率的影响。该论文仅研究轴承,未涉及后缘襟翼运动机构传动效率测试装置。
4.在2018年07月20日公开的、授权公告号为cn207631527u、题为《襟翼作动装置试验过程中的加载运动机构》的实用新型专利中,提供了一种襟翼作动装置试验过程中的加载运动机构,用于提高作动器装置测试的准确性。该公开内容通过摇臂模拟襟翼翼面偏转,并且提供了一种随动加载装置,但不适用于运动机构的测量。
5.现有技术中缺少专门用于飞行器襟翼运动机构传动效率的测试/试验装置,而有限的襟缝翼增升装置的耐久试验也通常采用全尺寸襟缝翼翼面加机构,导致试验成本非常高。因此,迫切需要一种随动加载的民用飞行器襟翼运动机构传动效率测量和耐久性试验台架,其能够用于襟翼运动机构传动效率测量和机构耐久性试验,以便在准确模拟襟翼运动过程中的真实状态的同时,显著降低试验难度和试验成本。
技术实现要素:
6.本发明的目的是提供一种随动加载的民用飞行器襟翼运动机构的传动效率的测量和耐久性试验台架,以测试不同驱动转速和气动载荷作用下襟翼收放过程中的驱动扭矩和摩擦力矩,对于形成一套可靠的后缘襟翼运动机构传动效率的预测及分析计算方法,具有重要意义。
7.根据本发明的一个方面,提供了一种襟翼运动机构的试验台架,该试验台架包括:致动器,致动器上设有用于测量致动器的输出力矩的第一组传感器,能够模拟飞行器襟翼
收放运动的第一运动机构和第二运动机构,第一运动机构和第二运动机构由致动器驱动同步运动,其中,第一运动机构包括用于测量第一运动机构的输出力矩的第一运动机构传感器,以及用于模拟飞行器襟翼经受的气动载荷的加载装置,加载装置由第二运动机构承载并且加载连接到第一运动机构的输出部。
8.通过这种结构的试验台架,能够方便且准确地模拟襟翼运动,以用于襟翼运动机构传动效率的测量和耐久性试验。具体地,例如传动效率可以基于测量的第一运动机构的输出力矩和致动器的输出力矩来计算。并且通过记录第一运动机构和第二运动机构已经经历的运动周期的次数,在期望的试验次数处分别测量该实验台架的传动效率,使得能够评估其耐久性,并且还能够基于已有的历史数据评估传动效率的变化趋势。
9.根据本发明的上述方面,较佳地,致动器包括马达、驱动地连接到马达的变速器、以及连接到变速器的枢转轴,其中,第二运动机构固定地连接到枢转轴并被枢转轴驱动运动。这样,能够自动地实现第二运动机构的周期性运动,并且能够通过调节马达转速或变速器的传动比来实现不同的输入力矩和输入速度,以适应/满足不同的试验要求。
10.根据本发明的上述方面,较佳地,第一运动机构包括第一曲柄连杆机构,其中,第一曲柄连杆机构包括第一曲柄和多个连杆,并且第一曲柄的第一端枢转地连接到枢转轴,并且致动器还包括拨叉,拨叉驱动地连接到枢转轴并被枢转轴驱动运动,并且拨叉能拨动第一曲柄,以使第一曲柄的第一端围绕枢转轴旋转。这样,由于拨叉和第二运动机构均被枢转轴驱动旋转,而拨叉又驱动第一运动机构运动,使得实现了随动式的试验装置/机构,从而能够更真实地模拟襟翼运动过程。并且由于加载装置由第二运动机构承载,因此加载装置也能够随动地加载,以确保试验的准确性,结构简单,易于实施。
11.根据本发明的上述方面,较佳地,第一运动机构的多个连杆包括第一连杆和v形的第一摇杆,其中,第一连杆的第一端经由第一接头枢转地连接到第一曲柄的第二端;其中,第一摇杆的第一端经由第二接头枢转地连接到第一连杆的第二端,第一摇杆的拐角端经由第三接头连接到加载装置,并且,第一摇杆的第二端经由第四接头枢转地连接到第二运动机构。这种结构能够更真实地模拟现有民用飞行器上的铰链式单缝襟翼收放运动机构,使得试验更接近所要模拟的襟翼的运动状态,确保试验结果的可靠性。
12.根据本发明的上述方面,较佳地,第二运动机构成对地设置在第一运动机构的两侧,并且第二运动机构包括第二曲柄连杆机构,其中,第二曲柄连杆机构包括第二曲柄、第二连杆和v形的第二摇杆,其中,第二曲柄的第一端固定地连接到枢转轴并被枢转轴驱动运动,而第二曲柄的第二端枢转地连接到第二连杆的第一端;其中,第二连杆的第二端枢转地连接到v形的第二摇杆的第一端,并且v形的第二摇杆的第二端枢转地连接到第一运动机构的第一摇杆的第二端。通过这种成对设置的第二运动机构,能够更好地承载加载装置,并且确保加载装置对第一运动机构的均衡加载,确保试验结果的稳定性。
13.根据本发明的上述方面,较佳地,加载装置包括加载部和承载部,其中,承载部枢转地连接到第一运动机构的第三接头,从而能够随着第一运动机构和第二运动机构的连续运动,实现稳定的加载,以更好地模拟作用在襟翼上的气动载荷。
14.根据本发明的上述方面,较佳地,加载装置还包括载荷调节装置和载荷传感器,其中,加载部驱动地连接在载荷调节装置和承载部之间,而载荷传感器驱动地连接到加载部,用于测量由加载部施加到承载部的载荷大小。通过这种结构,能够根据试验需要来调节施
加到第一运动机构的的载荷大小,使得能实时获得具体施加的载荷大小。
15.根据本发明的上述方面,较佳地,加载部包括钢丝绳和枢转地支承在第二运动机构的v形的第二摇杆上的滑轮,其中,钢丝绳经由滑轮连接到承载部,从而尽可能降低载荷传递过程中的损失,使得实际施加到第二运动机构的载荷尽可能接近载荷传感器所测量到的数值,进而确保试验结果尽可能准确。
16.根据本发明的上述方面,较佳地,第一运动机构传感器包括分别设置在第一接头、第二接头和第三接头处的力传感器,以及设置在第四接头处的编码器。这样,使得能够获得第一曲柄连杆机构的每个枢转连接点处的实际力矩输出,从而能够分别获得在这些接头处的分段传动效率。
17.根据本发明的上述方面,较佳地,第一运动机构传感器还包括设置在v形的第一摇杆的第一端和拐角端之间的三维力传感器,并且试验台架还包括磁性保持机构,其中,磁性保持机构包括设置在三维力传感器两侧的第一磁体和设置在第二运动机构上的第二磁体,并且第一磁体和第二磁体以磁性相斥关系面对地间隔开,并且三维力传感器两侧的第一磁体与第二磁体之间的排斥力大小相等。由于采用这种非接触的约束方式,使第一运动机构和三维力传感器在垂直于第一摇杆运动平面的平面内运动,减少三维力传感器的测量误差。
18.综上所述,本发明提供了一种随动加载的民用飞行器襟翼运动机构效率测量和耐久性试验台架,试验对象可以仅包括对传动效率影响最关键的单套运动机构,因此能够显著降低试验难度和试验成本。此外,通过设计与襟翼机构(即第一运动机构)“孪生”的试验加载机构(即第二运动机构)实行随动加载,能够更准确地模拟襟翼运动过程中的真实状态。
19.由此,通过本发明的襟翼运动机构的试验台架满足了试验要求,实现了预定的发明目的。
附图说明
20.为了进一步说明根据本发明的襟翼运动机构的试验台架,下面将结合附图和具体实施方式对本发明进行详细说明,附图中:
21.图1是根据本发明的非限制性实施例的铰链式单缝后缘襟翼模型的示意性立体图;
22.图2是根据本发明的非限制性实施例的襟翼运动机构的试验台架的示意性立体图;
23.图3是示出了图2所示的襟翼运动机构的试验台架的一部分从一个角度观察的示意性立体图;以及
24.图4是示出了图2所示的襟翼运动机构的试验台架的一部分从另一个角度观察的示意性立体图。
具体实施方式
25.应当理解,除非明确地指出相反,否则本发明可以采用各种替代的取向和步骤顺序。还应当理解,附图中所示及说明书中的具体装置仅是本文公开和限定的发明构思的示
例性实施例。因而,除非另有明确的声明,否则所公开的各种实施例涉及的具体运动路径、方向或其它物理特征不应被视为限制。
26.下面结合附图具体说明本发明的襟翼运动机构的试验台架100。
27.图1是根据本发明的非限制性实施例的铰链式单缝后缘襟翼200模型的示意性立体图。
28.如图1所示,在襟翼200的两个侧部处设有两组曲柄连杆机构,每组曲柄连杆机构借助枢转的承载点a、b、c、d将驱动力从o点传递到d点,从而控制襟翼200的位置及角度变化,以便在飞行器起飞、巡航或着陆期间根据期望增大或减小机翼弯度和机翼面积。如本领域人员已知的,飞行器襟翼200在飞行期间受到持续的气流作用,气流例如沿着襟翼200的上表面和下表面流动,该气流对襟翼200的作用力可以在d点处反作用到曲柄连杆机构。
29.应当注意,图1仅示意性地示出了铰链单缝襟翼200及其驱动机构的模型,该模型相对于实际的飞行器襟翼进行了简化,只保留了主要的运动部件,以便更清楚地示出本发明的发明构思。
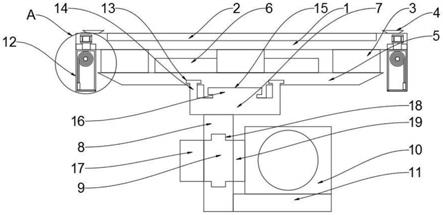
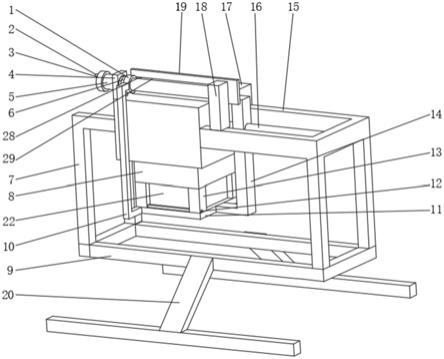
30.图2是根据本发明的非限制性实施例的襟翼运动机构的试验台架100的示意性立体图,该实验台架100的结构基于如上所述的图1的襟翼200的模型获得。图3是示出了图2所示的襟翼运动机构的试验台架100的一部分从一个角度观察的示意性立体图。
31.如图所示,实验台架100可以整体固定到框架300,框架300例如可以是具有成大致90度角度的两个相邻支承部的刚性结构,以模拟图1中所示的襟翼200所支承在其上的o点和c点的承载结构。当然,在替代实施例中,也可以不提供框架300,而将根据本发明的实验台架100固定到其它临时性的试验结构,例如通用的试验支承框架等。
32.如图2中所示,根据本发明的非限制性实施例的试验台架100可以包括:致动器10、第一组传感器20、第一运动机构30、第二运动机构40、第一运动机构传感器50和加载装置60。
33.致动器10可以包括例如电动机的马达11、变速器12和枢转轴13,变速器12可以例如是减速器,其驱动地连接到马达11以便根据期望调节马达输出的速度,枢转轴13可以连接到变速器12。马达11、变速器12和枢转轴13可以由框架300固定承载,例如枢转轴13可以借助轴承和附连到框架300的支架承载在框架300的竖直承载部上。马达11、变速器12和枢转轴13可以是本领域技术人员已知的各种类型并且以已知的方式联接。为了简化,本文不再进行详细描述。致动器10是试验台架100的动力源,用于提供驱动试验台架100的各运动部件运动的驱动力。
34.作为非限制性实施例,致动器10还可以包括拨叉14,拨叉14驱动地连接到枢转轴13并被枢转轴13驱动运动,并且如下文更详细描述的,拨叉14能够驱动第一运动机构30。例如,拨叉14可以通过形状配合卡合到枢转轴13,此时枢转轴13可以设置有凹部,拨叉14可以设置有凸部,或者可以另外地提供销或止挡件等。
35.第一组传感器20可以设置在致动器10上,用于测量致动器10的输出力矩。在设有拨叉14的实施例中,第一组传感器20可以设置在拨叉14上,用于测量拨叉14传递到第一运动机构30的力。此时,该输出力矩例如可以对应于第一运动机构30的输入力矩,从而为推断试验台架100的传动效率提供第一组基础数据。
36.作为示例,第一组传感器20可以是力传感器,此时输出力驱可以等于由该力传感
器测量的拨叉14传递到第一运动机构30的力乘以与之正交的拨叉14的力臂长度。
37.较佳地,第一运动机构30和第二运动机构40能够模拟飞行器襟翼200收放运动,并且第一运动机构30和第二运动机构40可以由致动器10驱动同步运动。
38.根据本发明的较佳实施例并且作为非限制性示例,第二运动机构40可以固定地连接到枢转轴13并被枢转轴13驱动运动。此时,拨叉14可以替代地固定地连接到第二运动机构40,例如与第二运动机构40成整体,而不直接连接到枢转轴13。在该示例中,由于拨叉14驱动第一运动机构30,因此,第一运动机构30将作为第二运动机构40的随动机构,使得第一运动机构30和第二运动机构40能够同步运动。
39.例如,第一运动机构30可以包括第一曲柄连杆机构,而第一曲柄连杆机构可以包括第一曲柄31和多个连杆,并且第一曲柄31的第一端311例如借助轴承枢转地连接到枢转轴13,以能够围绕枢转轴13自由旋转。
40.在包括拨叉14的实施例中,可以借助拨叉14拨动第一曲柄31,以使第一曲柄31的第一端311围绕枢转轴13旋转,例如第一曲柄31的第一端311可以借助轴承附连到枢转轴13,以绕枢转轴13自由旋转。
41.较佳地,第一运动机构30的多个连杆可以包括第一连杆32和第一摇杆33,第一摇杆33可以是大致v形。第一运动机构30的第一曲柄31和多个连杆可以例如按照如下方式联接在一起:第一连杆32的第一端321经由第一接头34枢转地连接到第一曲柄31的第二端312;而第一摇杆33的第一端331经由第二接头35枢转地连接到第一连杆32的第二端322,第一摇杆33的拐角端332经由第三接头36连接到加载装置60,并且,第一摇杆33的第二端333经由第四接头37枢转地连接到第二运动机构40,从而形成依次联接致动的曲柄连杆机构。
42.应当理解,在本文中,参照附图示出的各种曲柄、连杆和摇杆都是刚性的,并且可以通过本领域已知的各种方式制造,其材料可以是各种金属,例如铝合金、不锈钢,或者各种复合材料。
43.这样,来自马达11的动力借助枢转轴13和拨叉14传递到第一曲柄31,从而引起第一曲柄31围绕枢转轴13枢转,第一曲柄31又带动第一连杆32和第一摇杆33运动,从而能够精确地模拟图1所示的连接在襟翼200和动力源之间的在o
‑
a、a
‑
b以及b
‑
d
‑
c承载点之间的结构的运动,确保了试验的准确性和可靠性。
44.较佳地,第一接头34、第二接头35、第三接头36和/或第四接头37为球形接头或球形关节,以更好地模拟襟翼200的实际致动和运动过程。当然,本领域技术人员也可以设想其它的接头形式。
45.根据本发明的较佳实施例并且作为非限制性示例,第一运动机构30还可以包括用于测量第一运动机构30的输出力矩的第一运动机构传感器50,以便测量第一运动机构30的输出力矩,从而为推断试验台架100的传动效率提供第二组基础数据。
46.根据本发明的较佳实施例并且作为非限制性示例,第一运动机构传感器50可以包括分别设置在第一接头34、第二接头35和第三接头36处的力传感器,以及设置在第四接头37处的编码器。力传感器可以是应变式传感器,以通过在这些接头处的应变变化来获得相应的摩擦力,该摩擦力乘以力到枢转中心轴线的法线距离可以得到相应的输出力矩。传动效率例如可以通过输出力矩/输入力矩来获得。
47.较佳地,这些力传感器或应变式传感器可以是无线的,使得测量的信号能够无线
地发送到未示出的控制装置或计算装置,以提高系统的效率和数据收集和计算的准确性。此时,这些传感器可以相应地设有电源,例如设置在传感器中的便携式电池等,并且可以设置相应的无线发送制作和无线接收装置,以与附图未示出的控制器或存储器通信。
48.根据本发明的较佳实施例并且如图2所示,第二运动机构40成对地设置在第一运动机构30的两侧,并且第二运动机构40可以包括第二曲柄连杆机构。较佳地,第二曲柄连杆机构可以包括第二曲柄41、第二连杆42和v形的第二摇杆43。此时,这些机构也相应地成对对称设置在第一运动机构30的两侧,从而形成镜像相同的两套运动机构。
49.如图2所示并且作为非限制性示例,第二曲柄41的第一端411固定地连接到枢转轴13并被枢转轴13驱动运动,而第二曲柄41的第二端412枢转地连接到第二连杆42的第一端421。而第二连杆42的第二端422枢转地连接到v形的第二摇杆43的第一端431,并且v形的第二摇杆43的第二端432枢转地连接到第一运动机构30的第一摇杆33的第二端333。应当理解,第二曲柄41、第二连杆42和v形的第二摇杆43之间的连接也可以采用球形接头之类的接头,或者替代地,采用枢转接头,以使第二运动机构40的运动更加平稳地保持在平面中。
50.如以上关于第一运动机构30所述的,这些曲柄、连杆和摇杆都是刚性的,并且可以通过本领域已知的各种方式制造,并且材料可以是各种金属,例如铝合金、不锈钢,或者各种复合材料。
51.继续参照图1
‑
3,气动载荷对襟翼200的翼面的作用力等效为在承载点d处的作用力,即在第三接头36处的作用力。
52.加载装置60用于模拟飞行器襟翼200经受的气动载荷,该加载装置60例如由第二运动机构40承载,例如借助轴和轴承承载在v形的第二摇杆43上,布置在对称的第二摇杆43之间。另外,加载装置60加载可以连接到第一运动机构30的输出部,例如,附连到第三接头36。
53.由于第一运动机构30和第二运动机构40是同步运动的或者是随动运动的,因此,承载在第二运动机构40上的加载装置60也跟随其所加载到其上的第一运动机构30进行随动运动,即,虽然第一运动机构30被驱动运动,但是加载装置60所施加到第一运动机构30的作用力保持相对静止。换言之,加载装置60和第一运动机构30之间的作用力如同保持在它们二者同时静止时那样。从而提供了期望的随动加载的加载装置60,进而实现了随动加载的试验台架100。
54.根据本发明的较佳实施例并且如图3所示,加载装置60可以包括加载部61和承载部62,其中,承载部62可以枢转地连接到第一运动机构30的第三接头36,用于模拟作用在襟翼200的翼面上的气动载荷。例如承载部62可以包括与第三接头36同轴设置的轴承,并且借助大致u形的支架附连到加载部61。例如,在图3所示的实施例中,加载部62的轴承在第三接头36的两侧的外部分别同轴地附连到第三接头36,从而在图示的示例中对第三接头36施加向上的拉力,以模拟作用在襟翼200的翼面上的向上的气动载荷或作用力。
55.较佳地,加载部61可以包括钢丝绳611和枢转地支承在第二运动机构40的v形的第二摇杆43上的滑轮612,其中,钢丝绳611经由滑轮612连接到承载部62。滑轮612例如可以如图3所示支承在第二运动机构40的v形的第二摇杆43之间,例如借助轴承和轴,以尽可能地降低其间的摩擦力。钢丝绳611较佳地为柔性的,并且在替代实施例中可以采用皮带或其它材质的线状件。
56.根据本发明的较佳实施例并且作为非限制性示例,加载装置60还可以包括载荷调节装置63和载荷传感器64,其中,加载部61驱动地连接在载荷调节装置63和承载部62之间,而载荷传感器64驱动地连接到加载部61,用于测量由加载部61施加到承载部62的载荷大小。载荷调节装置63例如可以包括如图3所示的手动加载手轮,通过转动手轮以收紧或释放钢丝绳611,从而调节施加到承载部62的拉力大小。而载荷传感器64可以是本领域已知的任何类型的拉力传感器,其较佳地设置(例如串联)在滑轮和手轮之间,以测量拉力大小。
57.在替代实施例中,载荷调节装置63也可以包括自动加载手轮,例如经由电动机驱动,以更精细、更准确地调节拉力大小,并能够在需要的时候实现自动试验。通过调节马达11转速和载荷调节装置63,可以进行传动效率的规律研究。
58.根据本发明的又一较佳实施例并且作为非限制性示例,替代地或附加地,第一运动机构传感器50还可以包括设置在v形的第一摇杆33的第一端331和拐角端332之间的三维力传感器70,该三维力传感器70例如可以借助传感器支架牢固地固定到v形的第一摇杆33。该三维力传感器70可以测量笛卡尔坐标系中三个垂直周向上的力,从而能够在第一运动机构30上测得第一摇杆33上的三个方向上的作用力,并且基于该测量数据推算在第二接头35和第三接头36处的摩擦力,以便与上述力传感器的测量数值相互校验,或者用于替代上述的力传感器。
59.为了使该三维力传感器70以及三维力传感器70所固定到的第一摇杆33的运动轨迹尽可能保持在平面中,试验台架100还可以包括磁性保持机构80,其中,磁性保持机构80包括设置在三维力传感器70或其支架两侧的第一磁体81和设置在第二运动机构40上的第二磁体82,并且第一磁体81和第二磁体82以磁性相斥关系面对地间隔开,并且较佳地,三维力传感器70两侧的第一磁体81与第二磁体82之间的排斥力大小相等。这种无接触式的保持机构是较佳的,因为避免了引入接触式外力,该接触式外力可能干扰第一运动机构30的运动路径。
60.磁性保持机构80的示例性结构在图4中示出,如图所示,第一磁体81与第二磁体82均成形为大致圆盘形的,并且各自包括两个,其中两个第一磁体81紧贴三维力传感器70设置在三维力传感器70或其支架两个侧部上,而两个第二磁体82借助销或轴附连到第二运动机构40的v形的第二摇杆43,并且三维力传感器70每一侧的第一磁体81与第二磁体82相互间隔开,且其间的磁性排斥力大小相等。并且由于第一运动机构30与第二运动机构40同步运动,第一磁体81与第二磁体82也保持同步,从而在运动中时刻保持直接面对,并且确保维持其间的斥力的大小和方向。
61.应当理解,虽然以上描述了第一运动机构传感器50为用于测量摩擦力的力传感器,但是附加地或者替代地,第一运动机构传感器50所测量的数据可以包括电机转速、驱动力驱、气动载荷、摇杆转速和轴承约束反力等。另外,虽然以上通过曲柄连杆机构来模拟图1所示的铰链式单缝襟翼200的收放运动机构,但是本领域技术人员能够设想其它的运动机构,只要其使得例如第三接头36的输出部能够符合或模拟承载点d(参见图1)的运动即可。例如,可以将承载点d的运动轨迹输入计算机,然后借助计算机辅助计算程序寻找可能遵循该轨迹的运动结构的组合。
62.还应当理解,虽然结合图2
‑
3中示出的第一摇杆33和第二摇杆43均是v形的,但是在替代实施例中,它们可以是u形的或者y形的,而不受限制。
63.本发明设计了一种后缘襟翼运动机构传动效率测试和耐久性试验台架100,主要优点可以至少包括以下:
64.(1)本发明给出襟翼运动机构传动效率的测量和耐久性试验方法和具体试验台架100;
65.(2)本发明设计了与第一运动机构30同步运动的第二运动机构40,能够提供随动加载,结构简单,易于实施;
66.(3)本发明采用磁力这种非接触的约束方式,使第一运动机构30在平面内运动,减少了三维力传感器70的测量误差。
67.如本文所用,“驱动地连接”的两个部件可以用来表示这两个部件连接到一起并且使得一个部件能够驱动或致动另一个部件。另外,用于表示顺序的用语“第一”或“第二”等仅仅是为了使本领域普通技术人员更好地理解以较佳实施例形式示出的本发明的构思,而非用于限制本发明。除非另有说明,否则所有顺序、方位或取向仅用于区分一个元件/部件/结构与另一个元件/部件/结构的目的,并且除非另有说明,否则不表示任何特定顺序、安装顺序、方向或取向。例如,在替代实施例中,“上部”可以用来表示“下部”、“第一关节”可以用来表示“第二关节”并且“第一端”也可以用来表示“第二端”。
68.综上,根据本发明的实施例的试验台架100克服了现有技术中的缺点,实现了预期的发明目的。
69.虽然以上结合了较佳实施例对本发明的试验台架进行了说明,但是本技术领域的普通技术人员应当认识到,上述示例仅是用来说明的,而不能作为对本发明的限制。因此,可以在权利要求书的实质精神范围内对本发明进行各种修改和变型,这些修改和变型都将落在本发明的权利要求书所要求的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。